嫦娥五号飞行试验器服务舱环月期间的角动量管理*
2016-04-07王晓磊
薛 锐,崔 雁,王晓磊
(1.北京控制工程研究所,北京100190;2.北京航天飞行控制中心,北京100094)
嫦娥五号飞行试验器服务舱环月期间的角动量管理*
薛 锐1,崔 雁2,王晓磊1
(1.北京控制工程研究所,北京100190;2.北京航天飞行控制中心,北京100094)
对环月地轨道环绕卫星所受重力梯度力矩进行了分析.在分析的基础上,利用在轨飞行数据得到卫星实际质量特性,并设计俯仰姿态偏置的方法,实现卫星重力梯度配平.通过嫦娥五号服务舱的实际在轨飞行,证明重力梯度配平方法可以降低星体所受重力梯度力矩,达到延长卸载周期的目的.
重力梯度;角动量管理;配平姿态
0 引言
嫦娥五号飞行试验器(CE-5T)于2014年10月发射,在完成全部主任务后,其服务舱重新进入200 km环月轨道,利用剩余寿命继续开展月球重力场反演等扩展任务.由于月球没有磁场,环月卫星不能利用磁卸载进行角动量管理,所有的角动量卸载均需要通过喷气完成.喷气卸载周期约为3天,每次卸载会产生8 mm/s的轨道扰动,此扰动对测定轨不利,进而影响重力场反演的结果.为降低卸载对轨道的影响,需要大幅度延长卸载周期,将卸载周期从3天延长至30天可以达到重力场反演对轨道的要求.
服务舱的环月高度为200 km,轨道周期约2小时.此高度的环月轨道重力梯度力矩主要是干扰力矩.如何通过较为简单的方法,降低重力梯度力矩的影响是服务舱角动量管理的关键.考虑到服务舱本身没有对月观测载荷,允许进行姿态偏置操作,本文在对环月卫星环绕重力梯度力矩分析的基础上,采取俯仰姿态偏置的方法实现卫星重力梯度配平,降低星体所受重力梯度力矩,从而达到延长卫星卸载周期的目的.
1 CE-5T服务舱干扰力矩分析
环月轨道坐标系与地球轨道一致,即轨道系+Zo指向月心,+Yo指向轨道负法向,+Xo与+Zo、+Yo成右手系.当环月轨道为圆轨道时,重力梯度力矩在星体坐标系的投影如式(1)所示

式中,Tg为卫星所受重力梯度力矩;ω0为卫星轨道角速度绝对值;I为星体转动惯量阵,I=;M为月心单位矢量,Tg为卫星本体坐标系中的投影,,[XbYbZb]为卫星本体坐标系基向量;M为卫星本体坐标系的投影,.为月心矢量在本体坐标系的投影,当月心矢量与本体Zb重合时,当卫星存在俯仰偏置角θ时.将式(1)展开后得到式(2)~(4)
显然,当卫星姿态相对于轨道坐标系稳定时Tgx、Tgy、Tgz均为常值.当卫星星体Yb轴与轨道负法向(轨道坐标系Yo)重合时,即卫星相对惯性空间只发生绕星体Yb轴的转动,则卫星绕轨道飞行一周,所受的重力梯度力矩累积可表示为

式(5)中H为星体绕本体Yb转动一周累积的角动量.在星体转动过程中,重力梯度力矩Tg可表示为

式(6)中[XiYiZi]为惯性坐标系基向量,不失一般性,该惯性坐标系定义可以定义为与轨道上某点的轨道坐标系重合.
将式(6)代入式(5)得到
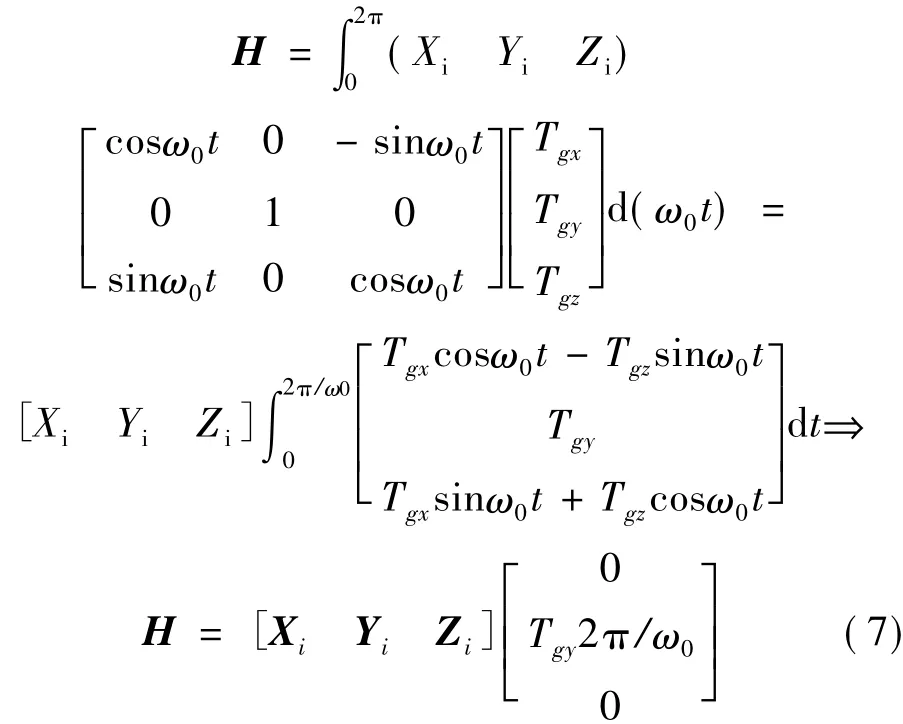
式(7)表明:当卫星以相对轨道坐标系稳定的姿态运行时,且星体Yb轴与轨道坐标系Yo重合,且轨道为圆轨道时,卫星所受重力梯度力矩只在星体Yb轴上有累积角动量,其他轴的累积量为0.Yb轴上每轨的角动量累积量相同.
2 卫星在轨数据分析
为降低重力梯度力矩,需要获得卫星惯量积、惯量差等质量特性.根据前节分析,卫星在轨重力梯度力矩只在卫星本体Yb轴上有累积,其他轴没有累积.因此重点分析与Tgy有关的质量特性影响.当卫星Yb轴与轨道系Yo轴重合时,式(3)简化为

为获得Tgy,需要求解惯量差(Ix-Iz)以及惯量积Izx.令卫星零姿态飞行,即星体坐标系与轨道坐标系重合,,式(8)进一步简化为

经过1天200 km圆轨道飞行,得到数据如表1所示.

表1 零姿态飞行数据Tab.1 Data in the case of three axis biased 0°
测得Yb轴上每条轨道的累积角动量为Hy= 0.276 N·m·s,该轨道角速度为ω0=0.047(°)/s.利用式(7)和(8)计算,得到惯量积

再令卫星俯仰(Yb轴)偏置15°飞行1天,得到数据如表2所示.

表2 俯仰偏置15°飞行数据Tab.2 Data in the case of pitch axis biased 15°
测得Hy=0.289 N·m·s.根据15°偏置量得到,与式(10)一并代入式(7)和 (8),得到惯量差

在式(11)中Axz、Azz分别为月心矢量与星体坐标系轴Xb、Yb夹角的余弦值,不难得到
式中θ为卫星俯仰偏置角,即卫星绕Yb轴偏置的角度.在式(8)中令Tgy=0,并注意到,容易求解得到当θ=-35.1°或144.9°时Tgy=0.原理上两个配平点都可以满足要求,但144.9°的配平点需要机动的角度过大,且会导致月球遮挡敏感器视场,实际飞行中不便使用,因此服务舱的重力梯度配平点选为俯仰偏置-35.1°.
3 在轨飞行验证
根据上节计算得到的重力梯度配平点,结合星上光学敏感器安装方式,选择进行俯仰偏置-35.1°进行飞行验证.

图1 俯仰轴0°偏置情况下角动量累积量Fig.1 Angular momentum accumulation in the case of pitch axis biased 0°

图2 俯仰偏置-35.1°时角动量累积量Fig.2 Angular momentum accumulation in the case of pitch axis biased-35.1°
对比图1和2,可以看出卫星在轨滚动、偏航方向的角动量没有累积效应,而俯仰方向受重力梯度影响有明显的累积效应.偏置飞行后角动量累积从每天3.1 N·m·s减少到了0.21 N·m·s,使用配平姿态飞行的效果明显,可以达到显著延长卫星卸载周期的目的.
4 结论
本文通过分析重力梯度力矩特性,并结合CE-5T服务舱的在轨飞行数据,得出以下结论:以稳定姿态、近圆轨道飞行的航天器重力梯度力矩在轨道角速度方向具有显著的累积作用,在轨道面内主要表现为振荡特性;通过在轨数据分析可以得到卫星实际的惯量差、惯量积等参数,并计算重力梯度配平姿态;卫星以配平姿态飞行可以大幅度降低重力梯度力矩的累积效应.
深空任务中,由于探测器环绕的目标通常没有稳定的磁场,因此就没有使用磁卸载的可能.使用喷气方式进行角动量管理往往会造成对轨道的扰动,即影响轨道测量,又消耗推进剂.本文通过CE-5T的在轨飞行实例,找到了利用重力梯度配平延长卸载周期的方法,更进一步,通过主动调整偏置姿态,该方法还能用于主动的角动量卸载.受限于整星质量特性(惯量积太大,而惯量差太小),服务舱的偏置姿态很大,不利于载荷工作,但本方法对于深空天体的环绕仍然有重要地借鉴意义.
[1] 章仁为.卫星轨道姿态动力学与控制[M].北京:北京航空航天大学出版社,1998.
[2]张军,马艳红,何英姿.空间站组合体惯性系内角动量管理控制[J].空间控制技术与应用,2010,36(6): 1-6.
ZHANG J,MA Y H,HE Y Z.Angular momentum magagement of space station combination in inertial frame[J].Space Control Technology and Application,2010,36(6):1-6.
[3]戴居峰,徐红兵,崔雁,等.嫦娥二号卫星L2点角动量管理[J].中国空间科学技术,2013,4:72-77.
DAI J F,XU H B,CUI Y,et al.Momentum management of Chang’e-2 spacecraft on l2 point[J].Space Science and Technology of China,2013,4:72-77.
[4]石顺详,张海兴,刘劲松.物理光学与应用光学[M].西安:西安电子科技大学出版社,2001.
[5]王春成,张旭东,黄文浩,等.探月飞行中太阳帆航天器帆面光学性能演化[J].中国科学技术大学学报,2007,31(1):82-86.
WANG C C,ZHANG X D,HUANG W H,et al.Optical performance evolution of solar sail-driven lunar probe[J].Journal of University of Science and Technology of China,2007,31(1):82-86.
[6]李连军,戴金海.双翼箱式航天器太阳光压干扰力矩模型[J].航天控制,2005,23(4):13-17.
LI L J,DAI J H.Model of sunlight pressure disturbance torque on cubical spacercasft with a pair of solar sails[J].Aerospace Control,2005,23(4):13-17.
[7]RYUMIN V V,BELYAEV M Y.Problems of control arised during the implementation of scientific research program onboard the multipurpose orbital station[J].Acta Astronautica,1987,15:739-746.
[8]HARDUVEL J T.Continuous momentum management of earth oriented spacecraft[J].Journal of Guidance,Control and Dynamics,1992,15(6):1417-1426.
Angular Momentum Management of CE-5T Service Module During Surrounding the Moon
XUE Rui1,CUI Yan2,WANG Xiaolei1
(1.Beijing Institute of Control Engineering,Beijing 100190; 2.Beijing Aerospace Control Center,Beijing 100094,China)
The gravity gradient torque of Chang’e-5T spacecraft is analyzed during surrounding the Earth-Moon.Based on the analysis,the actual quality characteristic is acquired via utilizing the on-orbit data.A method of bias attitude in pitch is also designed to achieve the attitude of gravity gradient trim.The onorbit flight proves that the method can reduce the gravity gradient of the spacecraft and extend the unloading period.
gravity gradient;momentum management;trim attitude
V44
A
1674-1579(2016)04-0053-04
10.3969/j.issn.1674-1579.2016.04.010
薛 锐(1975—),女,高级工程师,研究方向为控制理论和控制工程研究,卫星控制系统集同和测试、飞行控制;崔 雁(1980—),女,高级工程师,研究方向为卫星飞行控制;王晓磊(1972—),男,研究员,研究方向为卫星控制和推进系统总体设计,控制理论和控制工程研究.
*国家自然科学基金资助项目(11502017).
2016-01-23
