基于模糊PR和PI控制的三相逆变器并网研究
2016-04-06李浩然杨旭红王亚楠上海电力学院自动化学院上海市电站自动化技术重点实验室上海200090
李浩然,杨旭红,王亚楠(上海电力学院自动化学院,上海市电站自动化技术重点实验室,上海200090)
基于模糊PR和PI控制的三相逆变器并网研究
李浩然,杨旭红,王亚楠
(上海电力学院自动化学院,上海市电站自动化技术重点实验室,上海200090)
摘要:针对传统PI控制的局限及谐振控制参数固定等问题,提出模糊PR控制,并与PI以并联方式在αβ坐标系下控制三相逆变器并网,从而提高稳态电流质量。模糊PR控制技术,在谐振频率处有无穷大增益,可以无误差跟踪交流量,并根据误差大小和变化率对PR控制的比例参数和谐振系数在线调整。同时利用PI控制具有较大范围的增益和抑制谐波能力,使系统满足最优性能要求。详细分析了PR控制器参数的设计,最后通过仿真实验,将新控制策略和PI控制以及PR和PI控制相比较,证实所提方法的可行性。
关键词:模糊谐振控制;三相逆变器并网;在线调整;参数设计;无误差跟踪
近年来,新能源的发展如火如荼,比如太阳能、风能等。其中,关键的技术之一便是逆变器技术[1-2]。逆变器的输出节点一般直接与大电网相连接,其电压便被大电网的电压所钳制,因此逆变器并网一般控制方案为电流控制[3]。通过控制并网电流与电网电压同相位,实现单位功率因数并网,从而高效地为电网输送电能[4-5]。
国内外学者对三相电流逆变器做了大量的研究,主要控制技术有重复控制、滞环比较控制、无差拍控制、比例积分(PI)控制和准谐振控制。文献[6]采用重复PR复合控制策略,利用重复控制来抑制电网电压和非线性负载对并网电流影响。但重复控制较为复杂,需要系统较为精确的模型才能达到较好的控制效果[6]。文献[7]提出对电流内环采用准谐振控制,来抑制LCL滤波器的谐振问题[7]。但是,电流内环会影响系统响应速度,利用准谐振作为内环控制器,会降低系统响应速度。
模糊控制器实际上是具有自调节的控制器,在稳态时必然有静差,其精度有待提高,但其具有较强的鲁棒性和自适应能力,设计过程中无需被控对象精确数学模型。比例谐振控制在谐振频率处具有无穷大的增益,能实现对交流控制量的无误差跟踪。将模糊控制器与PR结合作为外环控制器,实时分析误差和误差变化率,从而对谐振控制的参数进行实时调整,避免了参数固定不可调的缺陷,从而提高三相逆变器并网系统的动态和稳态性能。而模糊控制的加入,对系统响应速度会有一定影响,将模糊PR控制与PI控制相结合,从而在保证无误差跟踪的同时,系统依旧具有较快的响应速度。
1 三相逆变器简介
三相并网逆变器的一般拓扑结构如图1所示。图1中,Udc为直流电源,是用其等效新能源中的光伏发电机或者风力发电机,Uga,Ugb,Ugc为电网三相电压。L1和L2为滤波电感,C为滤波电容。本系统采用电压源型逆变器,滤波电路采用LCL滤波电路,所用电感量较少。采用双环控制,外环为并网电流,内环为电容电流,采用双环目的是增加系统阻尼,提高系统稳定性[8]。其中,三相并网逆变器采用正弦脉宽调制方式。

图1 并网逆变器拓扑结构Fig.1 The topology of grid-connected inverter
由图1建立三相并网逆变器的数学模型,根据KVL和KCL及坐标变换可得αβ坐标系下的数学模型[9-10]。其中,Uc表示电容C上的电压,Uinv为逆变器输出侧电压,流过滤波电感L1的电流为i1,流过网侧电感L2的电流为i2。
可以看出,在αβ坐标系下,α轴和β轴是没有耦合的,可以独立控制[11]。因此本文选取的坐标系即为αβ坐标系。
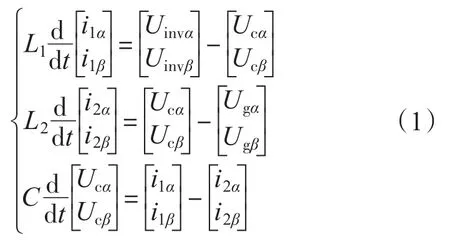
由式(1)可得LCL滤波器在αβ坐标系下的系统数学模型如图2所示。

图2 LCL滤波器数学模型Fig.2 The mathematical model of LCL filter
2 模糊PR控制器和新型复合控制
PR控制器是基于内模原理的控制器。根据内模原理,如果把产生某一指令的模型加入到稳定的控制系统中,可以实现对该指令的无静差跟踪[12-13]。PR控制器传递函数为

式中:KP为PR控制器比例参数;KR为PR控制器的谐振参数;ω0为谐振频率,ω0=314 rad/s。
在两相静止坐标系下,控制量为交流量,而PI控制无法实现对交流量的无静差跟踪,但PR控制在基波处具有无穷大增益,因此可实现无静差跟踪[14-15]。文章提出的模糊PR控制器,主要是使参数KP和KR根据并网电流误差与误差的变化率进行在线调整改变,使PR控制器适应逆变器系统不同的工作情况。模糊PR控制器结构如图3所示。

图3 模糊PR控制和PI控制结构框图Fig.3 The structure diagram of fuzzy PR controller and PI controller
PR控制有2个可调参数。KP影响系统增益和稳态性能。受稳定性影响,不能取值太大或太小。太大的话,会导致其它频率点的增益也变大。KR影响系统增益和谐振点峰值,其值越大,系统稳态误差越小,受系统稳定限制,不能取太大。模糊PR控制器的工作原理是:依据每个采样周期的采样数据,通过模糊控制器实现对KP和KR的在线调整[15]。首先根据并网逆变器数学模型和传递函数,确定PR控制参数的初始值KP0和KR0。所设计的模糊控制器,输入为指令电流iref和并网电流igrid的误差e与误差变化率de,输出为对PR控制参数KP和KR的改变量ΔKP和ΔKR。
加入常用的响应和调节速度都较快的PI控制,其优点是:1)在特定频率处实现补偿、提高精度的同时,保持参数在一定范围内的灵活性,增加系统鲁棒性;2)系统依旧具有较快的调整和跟踪速度。
建立模糊规则,必须根据KP和KR在控制器中相应的作用来制定。控制规则如表1所示。

表1 ΔKP和ΔKR的模糊控制规则Table1 The fuzzy control rules of ΔKPand ΔKR
以比例系数KP为例,控制量的控制原则为:当系统误差与误差变化率处于较大级别并且变化方向相同时,增大KP以增强模糊控制器的调节作用;当系统误差和误差变化率处于较大级别且变化方向相反时,减小KP避免超调或者振荡;当系统趋于稳定且误差较小时,为保持系统稳态应适当减小KP。
以KR为例,解模糊后的控制量为

一个采样周期过后,修改后的参数KR为KR=KR0+ΔKR·K式中:K为比例因子。
3 控制器参数设计
以α轴为例,分析控制系统的传递函数,如图4所示。
PI控制和PR控制的传递函数为


图4 控制系统简化框图Fig.4 The simplified diagram of control system
由于PR控制器和PI控制器是并联,设计时可单独设计,以减少计算量。以PR控制器为例,基于并网电流和电容电流双环控制的闭环传递函数为

由上式可确定系统稳定的充要条件。由于采用LCL滤波器,系统的稳定范围有限,故必须合理设计Kp,KR,KC。此时闭环系统为5阶系统,对系统先进行降阶处理,再利用极点配置法来设计控制器参数。

式中:m为正整数;ξ为阻尼比;ωn为设计所期望的频率。


根据以上方程,按照极点配置方法,且LCL滤波器参数为L1=L2=3 mH,C=20 μF。从而计算出控制参数并微调,则有KP0=0.5,KR0=100,KeKpwm= 24.42,ξ=0.7,ωn=6 000 rad/s。PI控制器参数设计亦参考此方法。
4 仿真结果分析
根据以上分析,本文在Matlab中分别搭建PI控制、PI和PR控制以及本文提出的新型控制的仿真模型,对所设计的系统进行仿真验证和研究。根据国家并网标准,并网电流谐波畸变率应低于5%。指令电流大小为30 A,模型其它各仿真参数如表2所示。

表2 仿真模型主要参数Tab.2 The parameters′values of simulation model
仿真波形如图5,图6所示。图5a为新型复合控制下的三相逆变器并网电压电流波形。由图5a所示,新型复合控制电压和电流基本实现单位功率因数并网的要求,且与指令电流基本无误差。其中,电流放大5倍显示。
图5b~图5d所示为新型复合控制、PI控制、PI和PR控制并网电流THD。PI控制时电流THD 为4.00%,PI和PR控制时电流THD为2.72%,电流谐波畸变率已大大降低。采用模糊PR和PI控制时,电流THD为1.29%,波形质量提高效果明显。对于基波幅值,新型控制下基波幅值为30.09 A,而单纯PI控制28.1 A,PI和PR控制下为30.58 A。因为采用两相静止坐标系,所控制量为交流量,故PI控制下,电流误差较大。当加入PR控制后,电流跟踪误差大为减小。采用新型控制,可以在线根据误差大小及误差变化率进行调整,有效减小误差。由此可见,采用新型复合控制,稳态电流波形质量得到较大提高。
对系统的动态性能进行验证。设定指令电流从15 A突变到30 A。采用单位功率因数并网的控制策略,在dq坐标系下是从Id=15 A,Iq=0变化到Id=30 A,Iq=0。Iq始终设定为零,此时电流的突变可直接研究Id的变化,且其为直流量。设定电流指令在0.125 s时发生突变,PI控制、PI和PR控制及新型复合控制的Id变化如图6所示。

图5 并网电压电流波形和3种控制下的电流THD值Fig.5 The waveforms of grid-tied current and the THD values under three control strategies
由图6可以看出,PI控制电流指令突变时,其超调量和调节时间分别为σ=30.1%和ts=3 ms,PR控制和PI控制超调量和调节时间则为σ=16.0%和ts=3 ms,而在模糊PR结合PI控制的新型复合控制条件下,当电流指令突变时,其超调量和调节时间分别为σ=6.7%和ts=3 ms。在调节时间上3种控制策略都相同,但超调量明显有差别。PI控制对于交流量控制作用有限,无法较好地跟踪,PI和PR控制则较好,而新型控制则能够根据系统状态局部进行参数调整,得到较为理想的控制效果。由此可见,新型复合控制时的超调量要低于PI控制以及PR和PI控制,说明当电流指令突变时,新型复合控制在相同的调节时间内对系统的冲击影响更小,展现出良好的动态特性。

图6 指令突变并网电流波形和3种控制下并网电流的调节时间及超调量Fig.6 The waveforms of grid-tied current with reference changing and the settling time and overshoots under three strategies
5 结论
通过对基本LCL型并网逆变器进行分析,详细分析了控制器的参数计算,对PI控制、PI和PR控制以及模糊PR和PI复合控制进行了仿真实验,并对电网电流的静态性能和动态性能进行了详细分析。结果表明,采用新型复合控制策略,相比于传统PI控制以及PI和PR控制,新型复合控制下的稳态电流具有更低的谐波畸变率和更好的跟踪效果,稳态电流波形质量明显提高。在指令电流突变的情况下,新型复合控制虽然有模糊控制可能会影响系统响应速度,但由于结合了PI控制,使系统响应时间并未受影响且具有更小的超调量,降低了指令突变时对系统的冲击影响,由此证明新型复合控制下系统的动态性能更加优越。
参考文献
[1]张先进,宋永献.并网逆变器控制方法研究[J].电气传动,2010,40(12):8-11.
[2]陈东,张军明,钱照明.带LCL滤波器的并网逆变器单电流反馈控制策略[J].中国电机工程学报,2013,33(9):10-16.
[3]Wang Z,Chang L,Mao M. Dc Voltage Sensorless Control Method for Three-phase Grid-connected Inverters[J]. IET Power Electronics,2010,3(4):552-558.
[4]彭秋波,盘宏斌,刘勇,等. LCL型三相并网逆变器双闭环解耦控制器设计[J].电工技术学报,2014,29(4):103-110.
[5]Sun H,Sun Y,Zhang L,et al. Three Single-phase Control of NPC Three-level Photovoltaic Grid-connected Inverter Based on Quasi-PR Control[C]//Electrical Machines and Systems (ICEMS),2013 International Conference on. IEEE,2013:1603-1608.
[6]黄挚雄,徐保友,沈玲菲,等. LCL并网逆变器新型电流双闭环控制策略研究[J].电力系统保护与控制,2012,40 (17):1-5.
[7]李泽斌,罗安,田园,等. LCL型光伏并网逆变器电流内环控制方法[J].电网技术,2014,38(10):2772-2778.
[8]许津铭,谢少军,唐婷.基于极点配置的LCL滤波并网逆变器电流控制策略[J].电力系统自动化,2014,38(3):95-100.
[9]Zhang D,Niu H C,Jiang M. Proportional Resonant-controlled Grid Tied Inverter with LC Resonant Filter and Its Compari⁃son with Inverter with LCL Filter[C]//TENCON Spring Con⁃ference,IEEE,2013:272-276.
[10]宋树伟,阮毅,周小杰,等.单相光伏并网逆变器解耦控制策略研究[J].电气传动,2014,44(1):41-44.
[11]姚志垒,肖岚,张方华.无阻尼LCL滤波并网逆变器的设计与实现[J].高电压技术,2013,39(5):1232-1237.
[12]Cecati C,Ciancetta F,Siano P. A Multilevel Inverter for Photo⁃voltaic Systems with Fuzzy Logic Control[J]. Industrial Elec⁃tronics,IEEE Transactions on,2010,57(12):4115-4125.
[13]雷亚雄,李建文,李永刚.基于准PR调节器电流双闭环LCL三相并网逆变器控制[J].电力系统保护与控制,2014,42(12):44-50.
[14]王要强,吴凤江,孙力,等.带LCL输出滤波器的并网逆变器控制策略研究[J].中国电机工程学报,2011,31(12):34-39.
[15]董钺,芮春保,李钊,等.采用比例谐振控制的三相4桥臂并网逆变器的研究[J].电气传动,2014,44(4):42-45.
修改稿日期:2015-07-02
Research on Grid-connected Three-phase Inverter Based on Fuzzy PR Control and PI Control
LI Haoran,YANG Xuhong,WANG Yanan
(Automatic Engineering of Shanghai University of Electric Power,Shanghai Key Laboratory of Power Station Automation Technology,Shanghai 200090,China)
Abstract:According to the limitations of traditional PI control and the fixed parameters of PR control,a new strategy was proposed,which was fuzzy PR control. It controlled grid-connected three-phase inverter combined with PI control in parallel in the two-phase static coordinate. And the strategy can effectively improve the accuracy of compensation of the system and the quality of steady current. The fuzzy PR control,which had an infinite gain at the resonant frequency,could adjust the PR proportional coefficient and resonant coefficient online according to error and error rate and track the AC control variables without error. In order to help the system meet the requirements of optimal performance,PI control was added which had a large range of gain and harmonic suppression capacity. And the structure and parameters design of PR controller was described in detail. In the end,compared with the PI control,PI and PR control and the new strategy through the simulation experiment,then the proposed method is confirmed as a feasible strategy.
Key words:fuzzy PR control;grid-connected three-phase inverter;online adjustment;parameters design;tracking without errors
收稿日期:2015-03-16
作者简介:李浩然(1991-),男,硕士研究生,Email:LHaoran1991@163.com
基金项目:上海市科技创新行动技术高新技术领域重点项目(14511101200);上海市自然科学基金资助项目(13ZR1417800);上海市电站自动化技术重点实验室开放课题(13DZ2273800);上海市重点科技攻关计划(14110500700)
中图分类号:TM921.5
文献标识码:A