基于χ2检验的惯性/卫星紧耦合系统故障检测与隔离方法*
2016-03-24赵子阳李醒飞张家川
杨 涛,赵子阳,李醒飞,张家川
(1.天津大学精密仪器与光电子工程学院,天津 300072;2.天津航海仪器研究所,天津 300131)
基于χ2检验的惯性/卫星紧耦合系统故障检测与隔离方法*
杨涛1,2,赵子阳2,李醒飞1,张家川2
(1.天津大学精密仪器与光电子工程学院,天津300072;2.天津航海仪器研究所,天津300131)
摘要:研究了一种基于χ2检验的惯性/卫星紧耦合系统故障检测与隔离方法,该方法可利用故障检测函数自动识别单个卫导故障,并实时剔除故障星重构观测信息序列,从而避免了对紧耦合系统的影响。构建数字化仿真环境对所研究的故障检测与隔离方法进行了仿真,仿真结果表明,该方法可在卫星发生故障时及时检测并隔离故障星,并自动实现观测信息重构,保证了紧耦合系统的精度和完好性。
关键词:残差χ2检验,惯性/卫星,紧耦合,故障检测与隔离
0 引言
惯性/卫星紧耦合系统直接利用卫星伪距、伪距率等原始观测量信息估计惯导误差和接收机钟差,大大提高了组合系统的精度和连续性[1 -4]。然而,在工程实际中发现,在未进行完好性监测时,紧耦合滤波器的稳定性易受错误的星历参数、接收机原始观测量跳数等因素的影响。卫星导航系统曾多次出现过星历参数故障,其中最近一次发生在2014年4月2日,由于地面控制站注入了错误的星历参数,GLONASS在轨卫星星历参数误差骤然增大,导致定位误差一度达数十千米[5]。此外,当卫导接收机发生故障时,也会导致其输出的伪距和伪距率等测量参数出现野值,这些都会严重干扰紧耦合系统的正常运行。为此,开发一种可实时运行的系统级故障检测与隔离方法显得十分必要。
国内外已有许多学者开展了接收机自主完好性监测(RAIM)方法及惯导辅助的完好性监测方法研究[6 -9],传统的RAIM方法对星座分布等外部条件的要求较严格,使用受到一定限制,且绝大部分惯导辅助的卫导完好性监测研究成果都侧重于理论建模与仿真,未考虑故障检测与隔离方法的实时运行。本文拟首先建立惯性/卫星紧耦合系统的数学模型,之后研究两种基于χ2检验的故障检测与隔离方法,利用模拟的惯性和卫星系统开展数字仿真,对所研究的故障检测与隔离方法进行验证,最后得出结论。
1 惯性/卫星紧耦合系统数学模型
1.1系统状态方程
对于舰船等载体,可选取惯导及卫导接收机误差参数等作为误差状态[10]:
XI=[△Ve,△Vn,△准,△λ,△φx,△φy,△φz,△εx,△εy,εφz,△ax,△ay,△tu,△tur]
其中:△Ve,△Vn分别为惯导东向速度误差、北向速度误差;△准,△λ分别为惯导纬度误差、经度误差;△φx,△φy,△φz分别为惯导在载体坐标系x、y、z方向的姿态角误差;△εx,△εy,εφz分别为惯导载体坐标系x、y、z方向陀螺漂移误差;△ax,△ay分别为惯导载体坐标系x、y方向加速度计零位误差;△tu,△tur分别为卫导接收机钟差及钟差变化率。
系统状态方程为,
X=FX+GW(1)
式中,X为状态变量,F为状态转移矩阵,G为噪声驱动阵,W为系统噪声。
1.2系统量测方程
采用伪距量测时,惯性/卫星紧耦合系统的量测信息为接收机输出的多星座测量伪距与预测伪距之间的差值,预测伪距一般利用惯导位置信息及卫星星历计算得到。系统量测方程为:
Z=HX+V(2)
式中,Z为系统观测量,H为量测矩阵,V为量测噪声。
2 基于χ2检验的紧耦合系统故障检测与隔离方法
2.1总体思路
惯性/卫星紧耦合系统故障检测与隔离方法的总体思路是:利用惯导设备提供的短时间精密导航信息,为卫导系统提供序贯新息,利用惯导输出的用户位置及卫星星历计算预测伪距,通过各颗可见星测量伪距与预测伪距的一致性校验来判断GNSS故障。即使在可见星数少于5颗的条件下,也可利用该方法对紧耦合系统进行完好性监测,并对故障星进行检测与隔离。
在紧组合卡尔曼滤波器中,完好性监测在滤波器的时间更新和量测更新之间进行,步骤如下:
①对滤波器的被估计状态(包括惯导误差和卫导钟差等状态)进行时间更新,计算状态估计预测值和均方误差估计预测值;
②利用预测的误差状态信息计算量测预报值及预报伪距差,进而计算残差rk和残差方差Ak,并进行卫导故障检测;
③当故障检测函数超过告警门限时,利用m-1法进行m次故障检测排除故障星,最后利用无故障的可见星信息重组观测量Zk进行量测更新,完成一个滤波循环。
整个故障检测与隔离的流程图如图1所示。
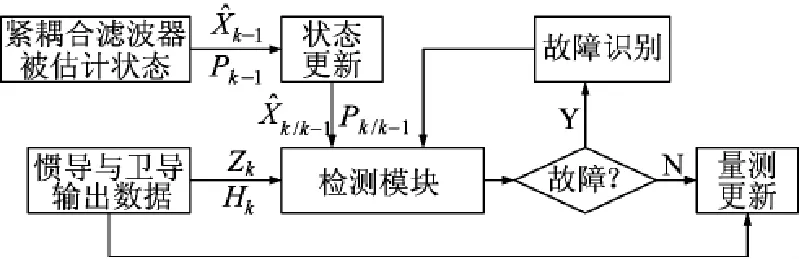
图1惯性/卫星紧耦合系统故障检测与隔离流程图
2.2残差χ2检测与隔离方法
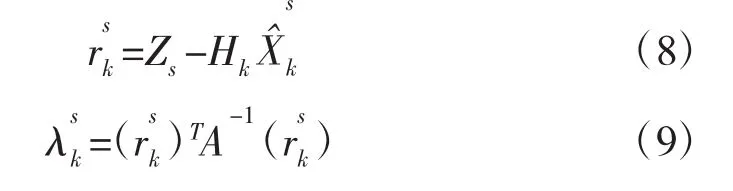
卡尔曼滤波器中,残差可记为:

在惯导辅助卫导接收机完好性监测时,Hkk/k-1=为一步状态估计量测预报值,是由k时刻惯导误差传播方程状态更新推出的误差状态估计值乘以量测阵Hk得到的量测预报值,即伪距差的预报值。由于卡尔曼滤波属于线性最小方差估计,因此,残差rk是白噪声序列,其方差为

定义检测函数为:

显然λk符合χ2分布。由于赞k/ k-1由{Zk-1,Zk-2,…,Z1}计算得到,可以得到rk各元素不相关,因此,λk的自由度等于rk的维数m(即紧耦合系统可见卫星数),此时λk~χ2(m)。确定故障判定准则为:

式中,故障判定门限TD可由可见卫星数m和虚警率确定,当故障检测周期为1 s,虚警率为0.002/h时,判定门限与可见卫星数关系如表1所示。
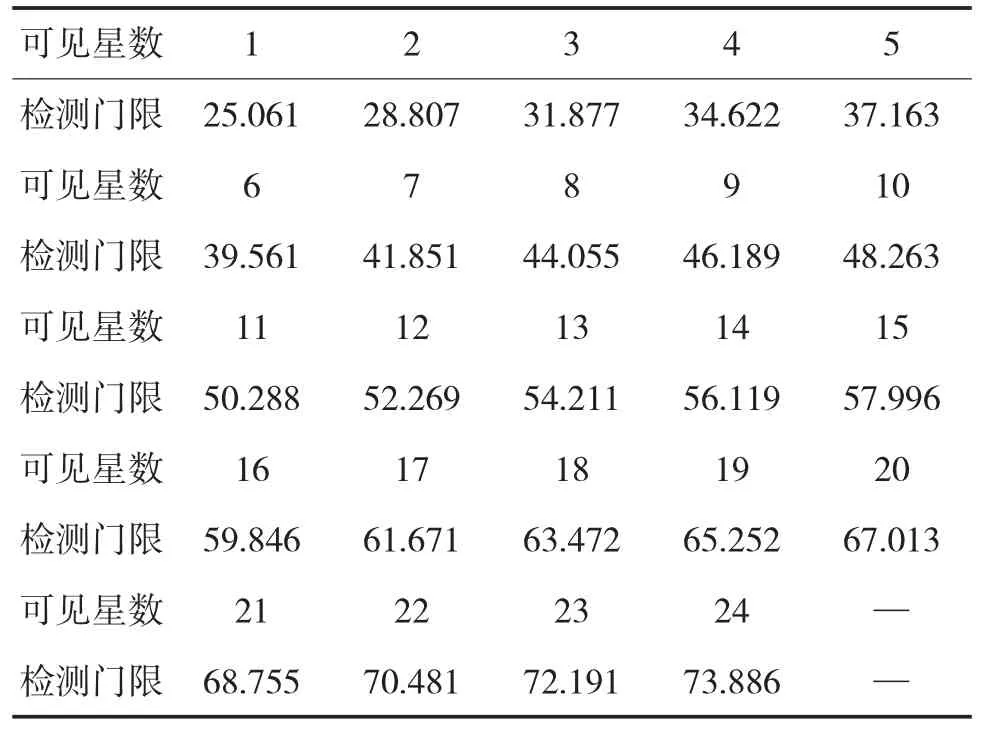
表1检测门限与可见星数的关系
当检测函数超过门限时,可以判断存在故障,然后利用m-1组合法进行m次残差检验,即一次排除一颗可见星,利用余下的m-1颗可见星重组伪距差量测量,并进行残差检测,以识别故障星。
2.3状态χ2检测与隔离方法
由于卡尔曼滤波采用递推方式实现状态估计,当量测量Zk存在慢变故障时(如卫导时钟漂移故障),滤波器将有可能将定位结果的偏差视为用户状态的正常变化而修正Pk,导致滤波器不再正确跟踪用户真正状态,即出现“故障跟踪”现象。此时,在同样故障偏差条件下,慢变故障对应的检测函数小于快变故障对应的λk,使得残差检验法不易检测出故障,采用状态外推检验法可以解决这一问题。

无关,仅仅是通过惯导误差传播方程外推出的伪距差量测预报值。因此,Z赞sk不会受s时刻到k时刻区间内带故障的量测更新影响,所以不会出现残差χ2检测与隔离方法的“故障跟踪”现象。
递推周期m=k-s应根据卫导慢变故障检测的设计要求进行选择。递推周期太短,故障偏差导致的滤波器量测量残差在短的时间内无法发展到可以被检测出的程度,因而易产生漏检;递推周期太长,一方面会导致状态外推的精度降低,使得滤波状态在递推中会越来越偏离真实值,造成无故障时残差超差,另一方面,递推周期过长也严重影响了故障检测的反应速度。重新定义残差与检测函数为:
3 仿真验证与分析
仿真系统主要包括用户真实轨迹模拟、惯导模拟、卫导模拟和故障模拟4个模块,仿真系统的流程图如图2所示。
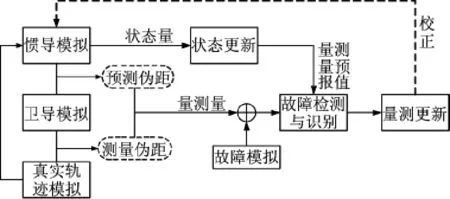
图2故障检测与隔离算法仿真流程图
仿真参数的设置如下:仿真总时间3 600 s;初始位置为东经117.143 23°,北纬39.182 33°,海拔0 m;卫导的输出频率为1 Hz,遮蔽角为5°;惯导的输出频率为100 Hz;采用全部可见星滤波,滤波器周期为1 Hz;在第1 100 s~1 500 s模拟2号星突变故障,故障大小为100 m。
仿真的主要步骤如下:
①进行用户真实轨迹模拟,并在真实轨迹中加入惯导器件误差模拟惯导输出,结合卫导星座模拟模块生成的卫星位置模拟测量伪距和预测伪距。
②在选定的故障卫星量测伪距上叠加一个故障值,然后将其送入惯性/卫星紧耦合滤波器进行滤波,同时在滤波器中加入上述故障检测与隔离算法,以检测和隔离故障星。
③利用滤波器误差状态的估计值来校正惯导输出,将全部仿真时间内校正后的惯导输出和相应的用户真实位置的数据一一记录并进行比较,绘制误差曲线图;记录每一次滤波的故障检测函数值,与相应时刻的检测门限值做比较,并绘制故障检测函数曲线图。

图3未进行故障检测与隔离前的经度误差
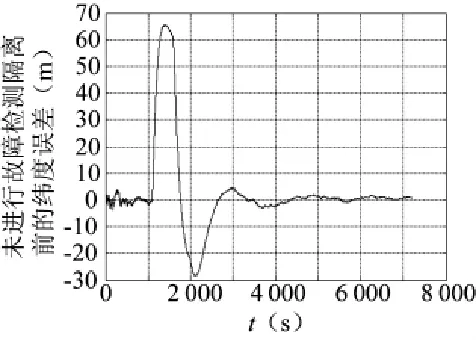
图4未进行故障检测与隔离时的纬度误差
图3和图4给出了卫导故障时,未进行故障检测与隔离前的组合导航定位结果,图5给出了对应的检测函数及门限曲线图。
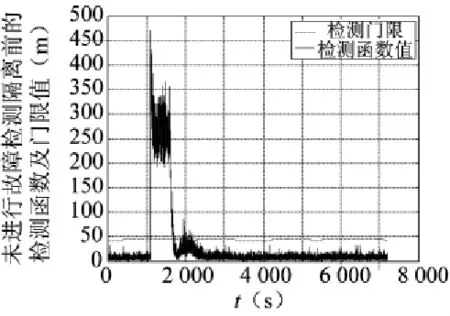
图5未进行故障检测与隔离前的检测函数及门限值
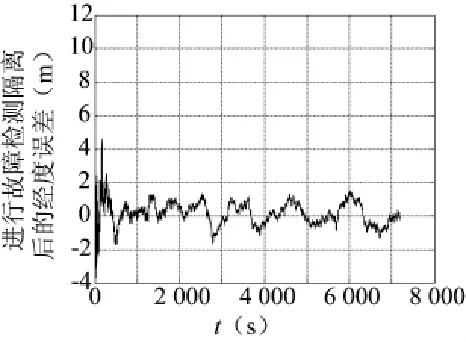
图6进行故障检测与隔离后的经度误差
图6和图7给出了卫导故障时,进行故障检测与隔离后的组合导航定位结果,图8给出了对应的检测函数及门限曲线图。

图7进行故障检测与隔离后的纬度误差

图8进行故障检测与隔离后的检测函数及门限值
从仿真结果可看出,未进行故障检测与隔离前,当可见星出现故障时会造成紧耦合系统定位精度严重下降,最大位置误差可达70 m,此时,故障函数远远超出门限值;加入故障检测与隔离模块后,当可见星发生故障时,残差χ2检测与隔离方法能及时检测并隔离故障星,进行系统重构后,故障函数值远远低于门限值,系统定位精度也未受到影响。
4 结论
针对传统基于卫导自身信息的RAIM方法只有在可见卫星数大于或等于5颗时可用的问题,提出一种基于χ2检验的惯性/卫星紧耦合系统故障检测与隔离方法,该方法取消了对可见卫星数的限制,当导航卫星发生故障时可实时检测并隔离障星,并利用剩余无故障可见星重构量测值序列,从而保证了组合导航系统的定位信息的精度完好性。
参考文献:
[1]XU X S,ZHANG G L. Implementation of tightly coupled GPS/INS navigation algorithm on DSP[C]//Computer Design and Applications,2010.
[2]WANG X L,LI Y F. An innovative scheme for SINS/GPS ultra-tight integration system with low-grade IMU[J]. Aerospace Science and Technology,2012,23(1):452-460.
[3]郑辛,付梦印.SINS/GPS紧耦合组合导航[J].中国惯性技术学报,2011,19(1):33-37.
[4]闫捷,徐晓苏,张涛,等.舰载小型化SINS/GNSS紧组合导航系统设计[J].中国惯性技术学报,2013,21(6):775-780.
[5]Bhatti U I,Ochieng W Y. Performance of rate detector algorithms for an integrated GPS/INS systems in the presence of slowly growing error[J]. GPS Solutions,2012,16(3):293-301.
[6]刘海颖,岳亚洲,杨毅钧.基于多解分离的GNSS/Inertial组合系统完好性监测[J].中国惯性技术学报,2012,20 (1):63-68.
[7]刘海颖,冯成涛,王惠南.一种惯性辅助卫星导航系统及其完好性检测方法[J].宇航学报,2011,32(4):775-780.
[8]钟丽娜,刘建业,李荣冰,等.基于LSSVM的惯性/卫星紧组合导航系统缓变故障检测方法[J].中国惯性技术学报,2012,20(6):754-758.
[9]陈坡,孙付平,景晓鹏,等.基于惯导辅助的GNSS完好性检测方法研究[J].大地测量与地球动力学,2013,33(2):101-104.
[10]王惠南. GPS导航原理与应用[M].北京:科学出版社,2003.
声明
近期有不法机构冒用《火力与指挥控制》编辑部名义,以非法手段骗取作者的稿件及财物,因此,我刊郑重声明:
从2005年至今,我刊一直使用以下两种投稿方式:
①电子投稿。投稿邮箱为:HLYZ@chinajoumal.net.cn;hlyz207@126.com,在线投稿尚未启用,启用后予以告知。
②信函投稿。邮寄地址为:山西省太原市193信箱《火力与指挥控制》编辑部。邮编:030006。
除此之外无其他任何方式向作者索稿。投稿时可电话咨询:0351-8725026或0351-8725316。
特此声明!
《火力与指挥控制》编辑部
2016年2月25日
Approach for Fault Detection and Isolation in INS/GNSS Tightly- coupled System Based on Chi- square Test
YANG Tao1,2,ZHAO Zi-yang2,LI Xing-fei1,ZHANG Jia-chuan2
(1. Tianjin University School of Precision Instrument and Opto-electronics Engineering,Tianjin 300072,China;2. Tianjin Navigation Instruments Research Institute,Tianjin 300131,China)
Abstract:An approach for fault detection and isolation of INS/GPS tightly-coupled system was studied,which could recognize single navigation satellite error automatically by the utilization of fault detection function,could eliminate the fault satellite and reconstruct measurements array,and could avoid the influence of the fault on system. The digital simulation environment was constructed,then simulations of method for fault detection and isolation were conducted,results of which indicated that the proposed method could detect and isolate the fault satellite in time,and could reconstruct measurements information,which ensured the accuracy and integrity of tightly-coupled system.
Key words:chi-square test of filter residual,INS/GNSS,tightly-coupled,fault detection and isolation
作者简介:杨涛(1979-),男,河北南宫人,博士后,高级工程师。研究方向:惯性/卫星组合导航技术。
*基金项目:海军重点预研项目(401010301);天津市企业博士后创新基金资助项目(2014-010)
收稿日期:2014-12-20修回日期:2015-02-14
文章编号:1002-0640(2016)02-0169-04
中图分类号:V249.32
文献标识码:A