机载火炮对地攻击训练弹着点定位法及误差分析
2016-03-16诸德放胡恩勇
陈 朋, 诸德放, 胡恩勇
(1. 空军勤务学院航空弹药系, 江苏 徐州 221000; 2. 空军勤务学院训练部, 江苏 徐州 221000)
机载火炮对地攻击训练弹着点定位法及误差分析
陈 朋1, 诸德放1, 胡恩勇2
(1. 空军勤务学院航空弹药系, 江苏 徐州 221000; 2. 空军勤务学院训练部, 江苏 徐州 221000)
针对当前机载火炮对地攻击训练弹着点探测范围大、报靶精度要求高的现状,基于脉冲式激光测距技术,提出了大范围、高频率的激光靶测距定位方法,通过构造空间模型解算弹着点位置。对于单个弹着点,采取对探测数据剔除特异值后取平均值的数据处理方法。对于连射条件下的弹着点,采取利用回归拟合分析法求拟合点替代实测点的数据处理方法,并通过试验数据进行了验证,结果表明:该方法可以提高报靶精度、客观反映飞行员打靶训练水平。
大范围激光靶; 弹着点探测; 连射; 回归拟合
在各类武器射击中,实际应用的报靶方法有光幕靶[1-3]、天幕靶[4-5]、光纤编码定位靶[6]、声坐标靶[7-8]以及基于图像处理技术的坐标靶[9-10]等,每种方法都有一定的适用范围。在机载火炮对地攻击训练的报靶中,由于受发射平台机动性较大、靶场环境较复杂、弹丸散布范围较大等因素的限制,采用光幕靶、光纤编码定位靶的方法难以实现大范围内的精确探测;采用天幕靶和基于图像处理技术的坐标靶虽可实现大范围探测,但报靶精度受光源、野外环境、价格等因素影响较大;采用声坐标靶的方法对高频射击(连射)会发生漏测、重弹等现象,环境、弹形以及弹丸飞行姿态也在一定程度上影响着报靶精度。鉴于此,基于脉冲式激光测距技术[11],笔者提出一种大范围、高频率的激光测距定位方法,来实现机载火炮对地攻击训练弹着点的精确报靶。机载火炮发射方式有单射、齐射、连射等,在单射、齐射条件下,只须对单个弹着点进行解算定位;而在连射条件下,弹着点短时间内分布密集,对其进行精确报靶较困难。因此,笔者着重对连射条件下的弹着点进行探测定位和误差分析。由于任何探测系统都存在误差,针对该激光报靶方法可对弹着点进行多次测量的特点,采取对测距数据剔除特异值[12]后取平均值的方法处理单个弹着点;根据连射条件下弹着点的特性,采取回归拟合分析法减小误差,可实现精确、客观地评定打靶训练成绩。
1 大范围、高频率探测激光靶
在进行机载火炮对地攻击训练时,靶场上事先设置醒目的靶环供飞行员瞄准射击。针对弹着点分布范围较大的特点,基于脉冲式激光测距技术对弹着点进行探测定位,激光探测器发射的激光经光学系统调整为厚度约0.05 m、发散角约90°的大范围激光幕面,最远探测距离可达40 m,其在靶场的布局如图1所示。
离靶心一定距离布置性能一致的2组4个激光探测器,即T1、T2、T3、T4,以过地靶靶心Q的标准攻击方向的航向y轴为基准,4个激光探测器的基准点关于y轴对称,其中以T1、T2探测器的连线为x(或x′)轴。探测器T1、T2向空中发射的激光靶面1和2共面,激光重叠部分构成激光靶面12,其与地靶水平面夹角为θ,且与标准攻击方向垂直。同理,探测器T3、T4构成的激光靶面34与激光靶面12平行,2组探测器沿y轴方向水平间隔距离为L1,其中系统取L1=5 m,θ=60°。
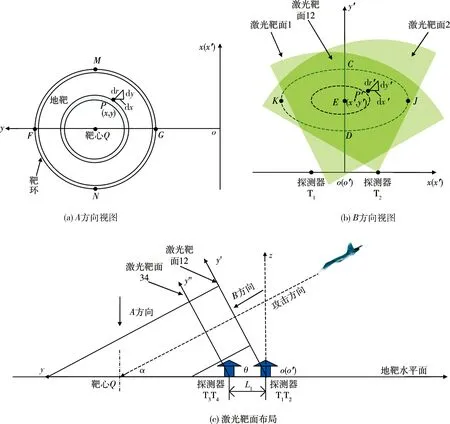
图1 激光靶面在靶场的布局
建立地靶的三维空间坐标系o-xyz和激光靶面12的三维空间坐标系o′-x′y′z′(激光靶面34的坐标系o″-x″y″z″在图中未标示),其中:x(或x′)轴与y轴的交点为圆点o(或o′),z轴根据右手法则确定朝上;y′轴在激光靶面12内,过圆点o且垂直于x(或x′)轴,z′轴根据右手法则确定朝上。
在进行机载火炮对地攻击训练时,载机总是沿标准攻击方向对地进行射击,攻击方向与地靶水平面夹角α约为30°,而实际的攻击方向有微小的偏差。航空炮弹采取连射的发射方式,航空火箭弹采取单射(齐射)的发射方式。根据靶场上激光靶面的布局,发射的弹丸依次穿过激光靶面12和34。本系统采用发射频率为0.1 MHz的脉冲发射激光探测器,对最小尺寸为0.1 m、最大速度为1 km/s的弹丸可实现5次探测,从而避免发生漏测、重弹等现象。弹丸在穿过激光靶面12的过程中,激光探测器T1、T2分别对弹丸进行测距,通过相交定位原理确定弹丸在激光靶面12上的弹着点位置P′(x′,y′,0)(在坐标系o′-x′y′z′下的坐标)。同理,可确定弹丸在激光靶面34上的弹着点位置P″(x″,y″,0)(在坐标系o″-x″y″z″下的坐标)。根据弹丸末段弹道近似呈直线的原理,连接弹丸穿过这2个激光靶面上的弹着点P′和P″,将其延长至与地靶水平面相交,交点可近似当作弹丸在地靶水平面上的实际弹着点。
2 弹着点处理方法
2.1 弹着点解算空间模型的建立
激光报靶系统将弹着点置于建立的空间直角坐标系中进行解算,各个坐标系之间具有一定的变换关系。地面正交坐标系o-xyz与坐标系o′-x′y′z′之间的变换关系为
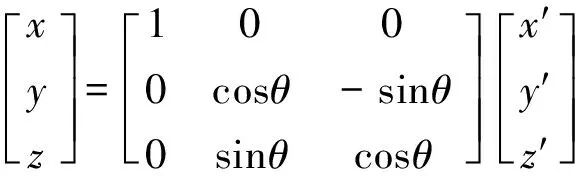
(1)
地面正交坐标系o-xyz与坐标系o″-x″y″z″之间的变换关系为

(2)

2.2 连射条件下弹着点的定位方法
根据连射条件下弹着点的特性,每次连续射击的6发炮弹末段弹道应该可以看作在一个平面内。但由于发射航空炮弹时受载机和航炮抖动以及环境等随机因素的影响,连射的多发弹丸末段弹道极有可能不在一个平面内,在靶面上的弹着点也可能不呈线性分布,而是存在一定的偏差。由于对飞行员的武器操控训练水平考核注重的是瞄准和射击时机的把握,因此,在进行机载火炮对地攻击训练时剔除上述随机因素影响,假设连射的多发弹丸末段弹道在一个平面内,即假设在靶面上的弹着点呈线性分布,采用回归拟合处理连射条件下的弹着点,相比于直接对单个弹着点进行坐标解算定位,其结果更能客观反映飞行员的打靶水平。
对于一个攻击波次连射的6发炮弹,通过处理得到实测点坐标P1i(x1i,y1i,z1i)和P2i(x2i,y2i,z2i) 根据线性假设,令
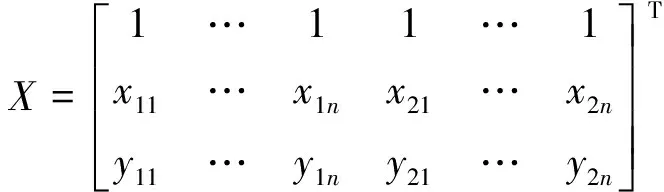
(3)
B=(b0,b1,b2)T,
(4)
ε=(ε1,ε2,…,ε12)T,
(5)
Z=(z11,…,z16,z21,…,z26)T,
(6)
则有
Z=XB+ε,
(7)
式中:X为回归矩阵;B为回归系数向量;ε为随机误差[15-16]。由最小二乘法可得
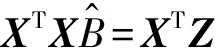
(8)
对于不同状态、不同时机发射的弹丸,测得的n组数据是不同的,即rank(X)=3,因此XTX可逆,故可得

(9)
从而得出拟合平面Π的经验回归方程为

(10)
式(10)可近似作为弹丸攻击平面Π的方程。

(11)
同理,对于激光靶面34内6发弹丸的实测点P2i,对应的拟合点为P2″i(x2″i,y2″i,z2″i),根据弹丸末段弹道直线方程
(12)
即可得出连射条件下经过回归拟合处理后地靶水平面内实际弹着点坐标Pi(xi,yi,zi)。
3 连射条件下弹着点处理方法的验证
根据表1、2中弹着点的原始数据,做出激光靶面12和34内6发弹丸弹着点的分布图,分别如图2、3所示。

表1 弹丸穿过激光靶面12的弹着点原始数据

表2 弹丸穿过激光靶面34的弹着点原始数据
图2 激光靶面12内6发弹丸弹着点分布图
图3 激光靶面34内6发弹丸弹着点分布图

表3 未经过回归拟合处理的6发弹丸实际弹着点
表经过坐标变换后的弹着点坐标
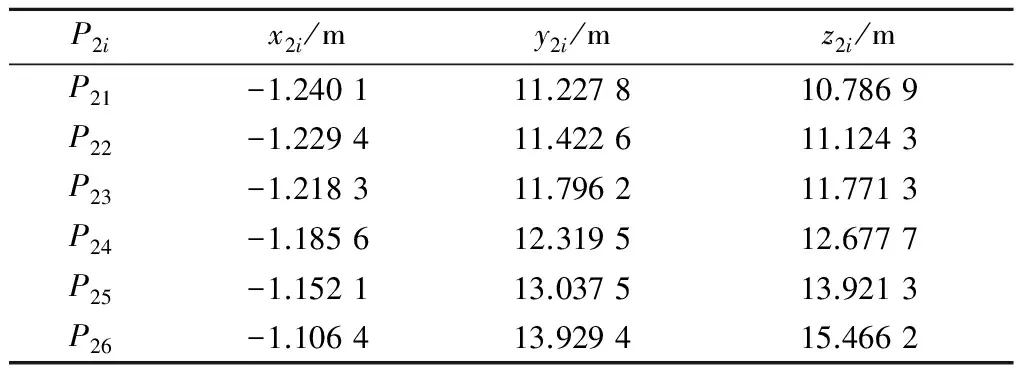
表5 Pi″经过坐标变换后的弹着点坐标
根据式(3)-(10),可得

(13)
即回归拟合平面Π的方程为

(14)
回归拟合平面示意图如图4所示。可以看出:回归拟合平面不是完全垂直于xoy平面,即弹丸攻击平面不是完全垂直于地靶水平面,而是存在一定的倾斜夹角。经计算,这6发弹丸所在的攻击平面与地靶水平面夹角约为89.64°,即存在0.36°的偏差,符合实际打靶条件下受各种不确定因素干扰的情况。

图4 回归拟合平面示意图
根据式(11)可得回归拟合后处理的拟合点坐标值,如表6、7所示。
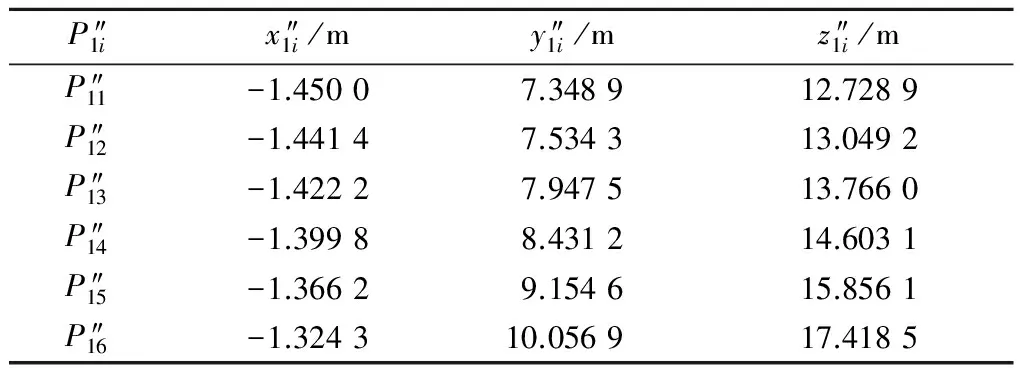
表6 回归拟合处理后的拟合点坐标P1i″
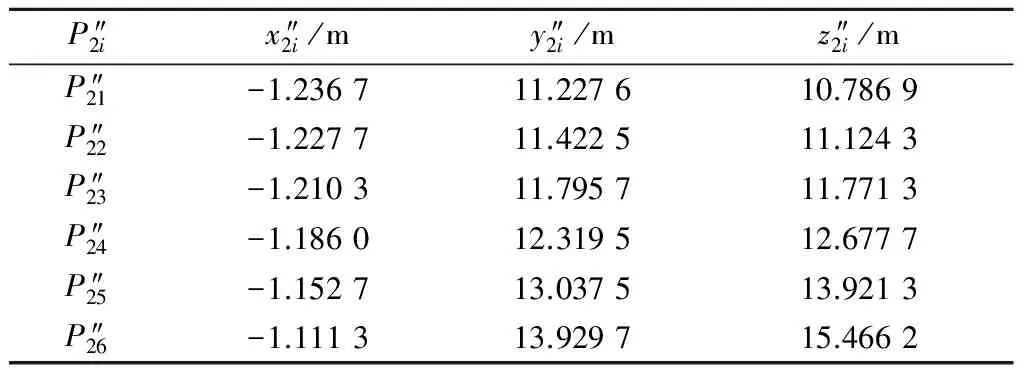
表7 回归拟合处理后的拟合点坐标P2i″
根据式(12)可得6发弹丸在地靶水平面内的实际弹着点坐标Pi(xi,yi,zi),如表8所示。
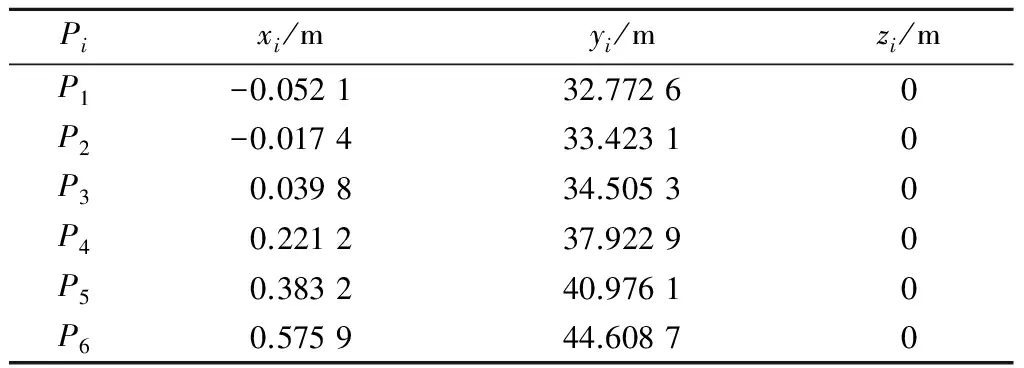
表8 回归拟合处理后的6发弹丸实际弹着点
对回归拟合前后6发弹丸在地靶水平面内的弹着点坐标Pi(Xi,Yi,Zi)和Pi(xi,yi,zi)进行比较,结果如图5所示。
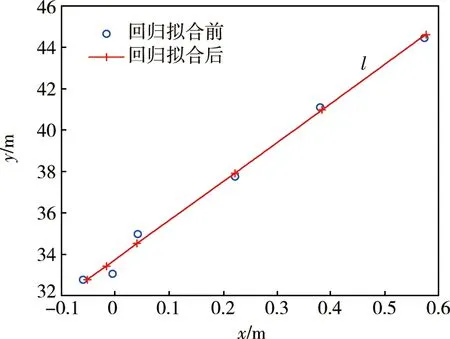
图5 回归拟合前后弹着点位置的比较
通过图5可以发现:回归拟合前后实际弹着点坐标发生了变化,回归拟合后实际弹着点呈线性分布,设直线为l,回归拟合前实际弹着点分布在直线l的两侧,尤其是第2、3发弹丸偏离直线l较大。由此可知:通过拟合回归消除了偏差,即减弱了载机和航炮抖动以及环境等随机因素对弹丸造成的影响,提高了报靶精度,客观地反映了飞行员的实际打靶水平。
4 结论
对机载火炮对地攻击训练弹着点进行报靶,需要在复杂环境中、大范围内对高速小弹丸进行精确探测,笔者基于脉冲式激光测距技术提出了大范围、高频率的激光靶测距定位方法,实现了对不同口径、弹速、发射条件(单射、连射、齐射等)下弹丸的精确定位。对单个弹着点以及连射条件下弹着点采取不同的数据处理方法,经试验数据验证,回归拟合分析法可以提高报靶精度、客观反映飞行员打靶水平。
[1] 蔡荣立, 倪晋平, 田会.光幕靶技术研究进展[J]. 西安工业大学学报, 2013, 33(8): 603-609.
[2] 邱婉静, 姜三平. 弹丸弹着点坐标测量系统研究[J]. 激光杂志, 2013, 34(2): 19-20.
[3] 倪晋平, 卢红伟, 董涛. 弹着点坐标的组合光幕阵列测量方法[J]. 弹道学报, 2012, 24(1): 37-40.
[4] 李翰山, 雷志勇, 王泽民. 2种天幕靶光幕交汇立靶测量系统分析[J]. 弹道学报, 2010, 22(1): 29-36.
[5] 董涛, 倪晋平. 基于天幕靶的六光幕立靶测量原理[J]. 应用光学, 2011, 32(5): 913-916.
[6] 杨雷, 王铁岭, 安莹. 主动式红外光电靶的研究[J]. 现代电子技术, 2004, 27(4): 52-55.
[7] 国蓉, 何镇安, 王伟. 被动声探测技术与弹着点定位方法综述[J]. 电声基础, 2010, 34(11): 48-52.
[8] 樊长虹, 于正亮, 徐宏坤.基于弹丸激波宽度的报靶系统: CN102435106A[P].2012-05-02.
[9] 洪佳敏, 曾培峰. 嵌入式自动报靶系统的设计与实现[J]. 计算机应用与软件, 2015, 32(1):234-238.
[10] 杨平, 刘洪. 无线智能报靶系统设计与实现[J]. 信息技术, 2012(2):38-40.
[11] 纪荣伟, 赵长明, 任学成.高精度高重频脉冲激光测距系统[J]. 红外与激光工程, 2011, 40(8):1461-1464.
[12] 林丽芬, 肖化, 吴先球. 肖维勒准则和格拉布斯准则的比较[J]. 大学物理实验, 2012, 25(6):86-88.
[13] 张璇, 程敏熙, 肖凤平. 利用Origin对数据异常值的剔除方法进行比较[J]. 实验科学与技术, 2012, 10(1):74-77.
[14] 刘建, 刘文金. 应用格罗布斯准则判定测量结果中的粗大误差[J]. 设计与研究, 2006(2): 20-21.
[15] 施雨. 应用数理统计[M]. 西安: 西安交通大学出版社, 2005: 188-197.
[16] 冯力. 回归分析方法原理及SPSS实际操作[M]. 北京: 中国金融出版社,2004: 156-160.
(责任编辑:尚彩娟)
Positioning Method and Error Analysis of Impact Point for Air-to-ground Attack Training of Airborne
CHEN Peng1, ZHU De-fang1, HU En-yong2
(1. Department of Aerial Ammunition, Air Force Logistic College, Xuzhou 221000, China; 2. Department of Training, Air Force Logistic College, Xuzhou 221000, China)
A large-range and high-frequency laser target ranging and positioning method based on pulsed laser ranging technique is proposed for a large-range detection and high-accuracy scoring of impact point of air-to-ground attack training projectile launched from airborne gun. A spatial model is established to calculate the impact point position. The paper proposes two data processing methods: one eliminates the specific values and averages for the single impact point detection data; the other replaces the measured points with regression fitting points to calculate impact points in continuous fire. The latter method is verified by experiment and confirmed that it can improve scoring precision and reflect pilot shooting training level objectively.
large-range laser target; impact point detection; continuous fire; regression fitting
1672-1497(2016)05-0054-06
2016-07-04
陈 朋(1991-),男,硕士研究生。
TJ06
A
10.3969/j.issn.1672-1497.2016.05.011
