基于非接触摄影测量的拉索索力测试
2016-03-11晏班夫陈泽楚朱子纲
晏班夫 陈泽楚 朱子纲
摘 要:开展了基于运动目标图像跟踪法的拉索索力测试研究.在拉索上布置目标测点,用摄像机获取单个及多个目标的振动图像序列,利用背景差分法进行运动目标检测,基于卡尔曼滤波法对运动目标进行跟踪,获得拉索多个目标测点的振动位移时程曲线,进而利用频率法求解拉索索力.实验结果表明,与加速度传感器的结果相比,摄影测量法测试结果可信,是基于频率的拉索索力测试方法的有效发展与补充.
关键词:索力测试;摄影测量;非接触测量;目标图像跟踪;卡尔曼滤波
中图分类号:U446.1 文献标识码:A
文章编号:1674-2974(2015)11-0105-06
拉索是索结构桥梁的重要承重构件,有必要在施工及运营阶段对其工作状态进行检测与评估.
传统的索力测试包括油压表法、压力传感器法、磁通量法和振动频率法.油压表测定法和压力传感器测定法一般适用于在建桥梁拉索张拉时的索力测定;磁通量法尽管在长期监测、非接触测量、传感器维护成本等方面有优势,但在初期费用投入、安装便利性等方面仍有待加强.当需要对运营阶段桥梁的
拉索进行索力测试时,频率法几乎是唯一选择.
近年来数码摄像技术有了长足发展,基于摄影的测量技术已引起国内外土木工程领域的重视.2007年,Chang和Ji[1]研究了用摄像机测量拉索振动的基本方法,包括相机校准、目标点的跟踪与对应、测点动位移获取、拉索振动频率抽取等;2008年,Ji和Chang[2]研究了基于摄影测量的拉索振动位移无目标测试技术.该技术用Canny边缘检测法对采集对象进行图像处理,通过无量纲长度匹配技术,能在不需标定目标的情况下,测量拉索的振动频率及幅值.实验室试验和现场测试结果较好;2008年,Ji和Chang[3]研究了利用光流法对测量对象进行无目标识别,可在不需进行目标标定的情况下,测量拉索的振动频率与幅值;2011年,Kim等[4]研究了基于图像法的建筑结构多点位移响应测量,并用摄影测量结合频率法,测试了一座悬索桥的索力值;2012年,Chien和Hong[5]在不使用任何人工目标的情况下,运用数字图像跟踪测试技术量测斜拉索的振动.该法利用索的直线边界,将其边缘线的中点作为伪目标点进行图像处理,得到索的振动位移时程及其振动频率.2014年,Ribeiro等[6]发展了非接触桥梁动位移测试系统,取得了15 m距离0.1 mm,25 m距离0.25 mm的测试精度.
可以看出,基于摄影测量的结构振动测试作为一种非接触测试方法,主要用于不便设置基准点的结构动位移测试,对动位移时程进行频谱分析可获得结构振动频率.这给传统的基于频率的索力测试方法增添了一个新的选择.
本文研究基于非接触摄影测量的索力测试方法.在拉索上布置目标测点,通过摄像机获取单个及多个目标与时间相关的振动图像序列,应用背景差分法进行运动目标检测,并基于卡尔曼滤波法对运动目标进行跟踪,进而获得拉索目标测点的振动位移时程曲线,最后利用频率法求解拉索索力.这一方法的最大优势在于操作简单、成本低,不需要安装传感器,且能同时跟踪多个测点.本文通过2个实验将该法与传统的频率法测试结果进行了对比.
1 运动目标检测
运动目标检测是将图像序列中的目标从背景图像中分割出来,检测效果直接影响后续目标跟踪的精确性.本文采用背景差分法[7]进行运动目标检测,进而对二值化后的差分图像进行形态学处理.
背景差分法是选取参考图像作为背景图像,并用当前图像与背景图像相减来检测运动目标.设参考图为:I.1(x,y),一幅包含有运动目标的图像为I.2(x,y),记两图像之差为:
2 卡尔曼滤波
卡尔曼滤波是由数学家Kalman在1960年提出的一种最优的数据递归处理算法,常用于运动估计.它以一个预测方程和一个校正方程为基础,运用递归方法对动态系统的状态序列进行线性最小方差误差估计.它只用当前帧的观测值和前一时刻的估计值,利用预测和校正方程,来预测新的估计值.
应用卡尔曼滤波器对运动目标进行实时跟踪包括以下4个步骤:滤波器初始化、预测、目标匹配和状态更新.
初始化:分别设置目标初始速度、P和Q初值.
预测:由预测方程预测运动目标在当前帧中的运动状态和误差协方差.
目标匹配:设定一以n×1维状态向量为中心的区域进行搜索,寻找该帧图像内的最佳匹配区域.
状态更新:根据实际的测量值与先验估计值,通过卡尔曼滤波器进行状态更新以获得后验估计值,并重复以上步骤.
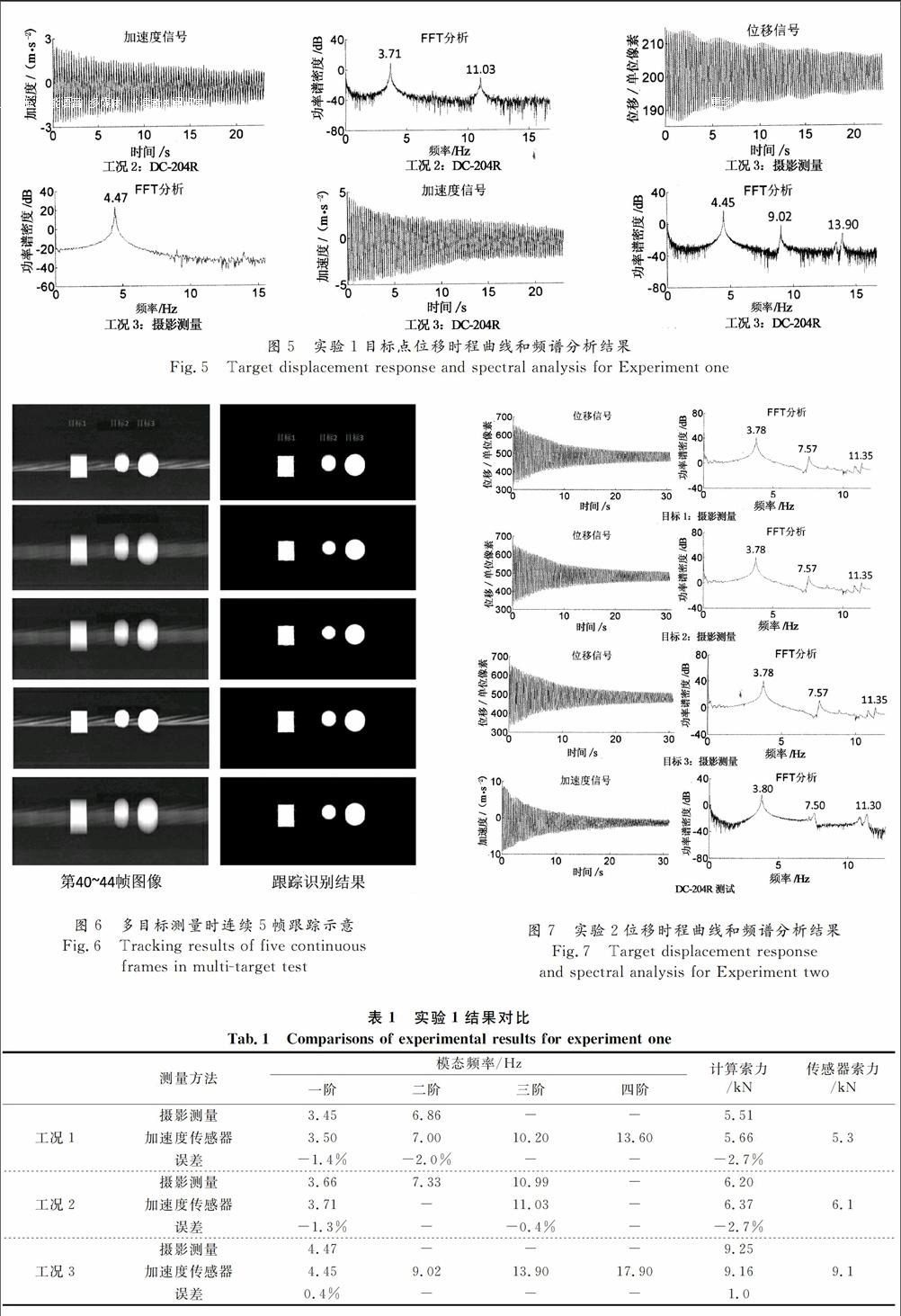
该算法对运动目标的跟踪效果良好,可克服小噪声干扰,减小特征匹配的搜索范围[8-9].图3为卡尔曼滤波器对一振动拉索上安装白色圆形标识的跟踪过程.由图可知,即便在采集的图像较为模糊的情形下,白色标识仍能够被准确跟踪识别.拾取标识的圆心坐标变化就可得拉索的振动时程响应.
3 索力计算
通过上述步骤对目标进行实时跟踪,可得到图像序列中每一帧图像特定目标点中心的振动时程响应.使用快速傅里叶变换(FFT)对该点的位移响应进行频谱分析,可得到该目标的振动频率.
4 实验测试
为了验证基于摄影测量拉索索力测试方法的精度及实用性,在实验室做了2个实验.实验1:用POINT GREY数字工业摄像机FL3-GE-13S2C-C获取图像,它能以31 fps的采样速度获取480×640像素的图像,该实验对应单一目标.实验2:用普通手机(Apple iPhone 4S)的摄像头,以24 fps的采样速度获取1 920×1 080像素的图像,该实验为多目标.两实验结果均与东京测器的DC-204R动态应变仪测试结果和安装在锚固区的压力传感器测试结果对比.
试验时,在实验室两基座间张拉一根预应力钢绞线,计算长度为10.37 m,由7根直径为5 mm的钢筋组成,公称直径为15.2 mm,截面面积为139 mm2,每延米理论质量为1.101 kg,并用千斤顶施加5~10 kN不等的张拉力.在钢绞线跨中位置贴上目标,并将摄像头对准,调好焦距,确保钢绞线上的目标能完整地被摄像头拍摄到,且在振动过程中不会超出视频范围.现场实验设置如图4所示.
4.1 实验1:单目标测试
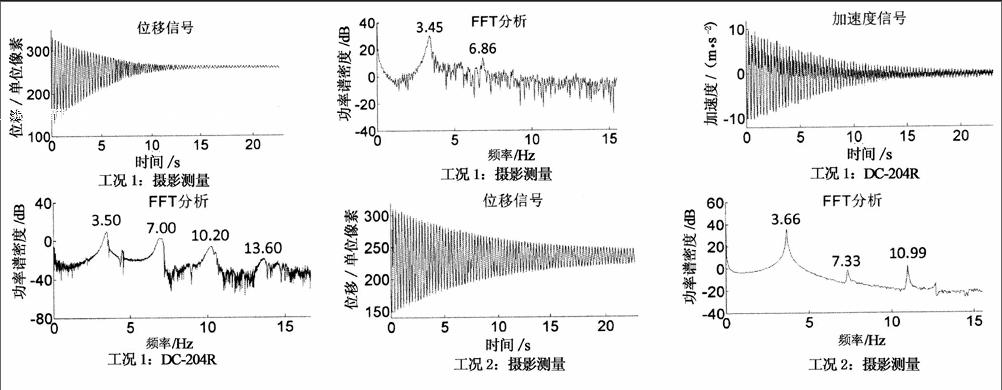
在钢绞线上贴一个目标,并用POINT GREY数字工业摄像机记录钢绞线在不同张拉力下的自由振动情况,如图4所示.利用基于卡尔曼滤波的目标检测技术得到目标点位移时程及频谱分析结果,如图5所示,前四阶振动频率测试结果见表1,其中索力计算结果利用实验得出的基频由式(15)计算得到.
可以看出,基于摄影测量得到的拉索振动频率与索力和由加速度传感器所得到的结果相比,误差均在2.7%以内,可以满足一般的拉索索力测试要求.
4.2 实验2:多目标测试
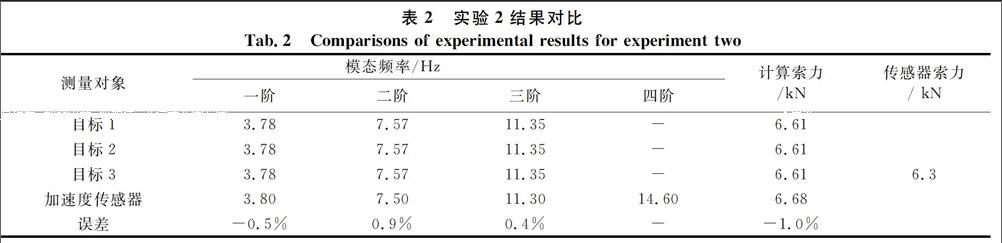
实验时,在钢绞线上贴上大小、形状不一的3个目标,用手机同步采集多个目标的振动视频图像.图6为多目标测量时连续5帧图像的跟踪结果;目标点位移时程及频谱分析结果如图7所示;前四阶振动频率及索力计算结果见表2,其中索力计算结果由式(15)得到.
结果表明,摄影测量能同时跟踪多个目标的振动,不同目标的各阶模态测试频率相近,索力测试误差在2.7%以内,且不同形状的目标对实验结果无明显影响.在实际应用中,基于摄影测量的非接触测试方法可拓展到多根拉索的索力测试,大大提高工作效率;在测试索体上布设多个目标点,可以测试索体振动模态;实验2仅用手机摄像头就能较精确测试拉索振动频率,使得索力测试过程更为方便.
5 结 论
高精度摄像机的发展和普及使得摄影测量在土木工程中的应用变得更为便利.本文研究了摄影测量在拉索索力测试中的运用.用普通摄像头或者手机进行图像采集,得到图像序列,这些图像序列经过二值处理和目标追踪检测,即可得到目标的位移时程图,最后利用频率法求解拉索索力.这一方法最大的优势在于操作简单、成本低、不需要安装传感器,且能同时跟踪多个测点.
通过2个实验验证了该方法的精确性.测试结果表明,该方法与传统加速度传感器测试结果误差较小,实验结果误差均小于3%.实验采用的摄像头为31 fps,640×480像素和24 fps,1920×1080像素,可以预见,如果采用分辨率更高、采样速度更快的摄像头,测量精度及适用范围将值得期待.本文提出的方法还有一个优势,即可以同时采集多个目标位置的位移响应,提高测试效率;通过多台摄像机的测试、图像融合及模态识别技术,可获取拉索的振动模态.因而,基于摄影测量的拉索索力测试方法是传统频率测试法的补充与拓展.下一步将研究摄影测量技术在实桥拉索索力测试中的应用.
参考文献
[1] CHANG C C, JI Y F. Flexible videogrammetric technique for three-dimensional structural vibration measurement \[J\]. Journal of Engineering Mechanics, 2007, 133(6):656-664.
\[2\] JI Y F, CHANG C C. Non-target stereo vision technique for spatiotemporal response measurement of line-like structures \[J\]. Journal of Engineering Mechanics, 2008, 134(6): 466-474.
\[3\] JI Y F, CHANG C C. Nontarget image-based technique for small cable vibration measurement \[J\]. Journal of Bridge Engineering, 2008, 13(1):34-42.
\[4\] KIM S W, KIM N S. Multi-point displacement response measurement of civil infrastructures using digital image processing \[J\]. Procedia Engineering, 2011, 14:195-203.
\[5\] CHIEN C C, HONG Z T. Modal frequency identification of stay cables with ambient vibration measurements based on nontarget image processing techniques \[J\]. Advances in Structural Engineering, 2012, 15(6):929-942.
\[6\] RIBEIRO D, CALCADA R, FERREIRA J, et al. Non-contact measurement of the dynamic displacement of railway bridges using an advanced video-based system \[J\]. Engineering Structures, 2014, 75:164-180.
\[7\] 张汗灵. MATLAB在图像处理中的应用\[M\].北京:清华大学出版社, 2008:301-341.
ZHANG Han-ling. Application of MATLAB in image processing \[M\]. Beijing: Tsinghua University Press, 2008: 301-341. (In Chinese)
\[8\] 李培华.序列图像中运动目标跟踪方法\[M\].北京:科学出版社, 2010:23-42.
LI Pei-hua. Moving target tracking method for image sequence \[M\]. Beijing: Science Press, 2010:23-42. (In Chinese)
\[9\] 邓自立.卡尔曼滤波与维纳滤波:现代时间序列分析方法\[M\]. 哈尔滨: 哈尔滨工业大学出版社, 2001:56-138.
DENG Zi-li. Kalman filtering and Wiener filtering: modern time-series analysis method \[M\]. Harbin: Harbin Institute of Technology Press, 2001:56-138. (In Chinese)
\[10\]方志,汪建群,颜江平. 基于频率法的拉索及吊杆张力测试\[J\].振动与冲击, 2007, 26(9):78-82.
FANG Zhi, WANG Jian-qun, YAN Jiang-pin. The tension measurement of cables and suspenders with frequency method \[J\]. Journal of Vibration and Shock, 2007, 26(9): 78-82. (In Chinese)
\[11\]任伟新,陈刚.由基频计算拉索拉力的实用公式\[J\].土木工程学报,2005,38(11):26-31.
REN Wei-xin, CHEN Gang. Practical formulas to determine cable tension by using cable fundamental frequency \[J\]. China Civil Engineering Journal, 2005, 38(11):26-31. (In Chinese)
