DC-DC变换器滑模变结构控制器设计
2016-03-11郭景盛
李 昊,李 婕,郭景盛,赵 斌
(1.河南工学院,河南 新乡 453003;2.原阳县产业集聚区管委会,河南 新乡 453500)
DC-DC变换器滑模变结构控制器设计
李 昊1,李 婕1,郭景盛2,赵 斌1
(1.河南工学院,河南 新乡 453003;2.原阳县产业集聚区管委会,河南 新乡 453500)
以双向半桥DC-DC变换器为研究对象,运用状态平均法建立其数学模型,在此基础上,引入滑模变结构控制,并验证了控制器的稳定性。在MATLAB/simulink中搭建模型,比较了开环控制与滑模变结构控制效果。仿真实验表明滑模变结构控制能够得到良好的动态性能,并且具有较强鲁棒性,大幅度提升了DC-DC变换器的控制性能。
DC-DC变换器;滑模变结构控制;鲁棒性;MATLAB
双向大功率 DC-DC 变换器技术在电动汽车系统中起着至关重要的作用,它能够实现电动汽车在电动状态下的电能供电,实现在制动或减速过程中能量的回收和存储,同时还能实现控制系统对能量流动方向的切换,保证电动汽车行驶的稳定性[1]。然而,大部分电力电子器件采用线性近似的控制策略,此种控制策略过分依赖数学模型,对系统参数变化敏感,当电动汽车加速或减速时,会导致DC-DC变换器输出电压超调量过大,动态响应慢,电压输出波形容易畸变[2]。基于滑模变结构算法设计的DC-DC变换器采用非线性控制方法,当系统达到滑动模态后,系统将不受变换器参数摄动的影响,能够达到良好的控制性能。
本文选取双向半桥DC-DC变换器为研究对象,采用状态平均法建立其数学模型,以双向半桥DC-DC变换器工作在Buck状态下为例[3,4,5],设计了基于滑模变结构算法的DC-DC变换器,着重阐明了滑模面的选择和滑模参数趋近率的设计,并将其控制效果与开环控制进行比较。仿真实验证明,基于滑模变结构控制的DC-DC变换器超调量变小,系统鲁棒性和快速性均优于开环控制。
1 DC-DC变换器建模
双向半桥DC-DC变换器的拓扑结构如图1所示。当电动汽车电动运行时,双向DC-DC变换器实现升压功能成为Boost变换器,电池组给电动机供电;电动机再生制动或减速时,双向DC-DC变换器实现降压功能成为Buck变换器向电池组模块充电。在正常工作时,DC-DC变换器中的开关管每一时刻只能有一个工作。本节以DC-DC变换器工作在Buck状态为例,建立其等效数学模型[6]。

图1 双向半桥DC-DC变换器拓扑结构
状态空间平均法是解决开关变换器解析法建模的重要方法,该方法能够得出表征开关变换器的输入、输出特性的数学描述[7]。本节将采用状态平均法对DC-DC变换器工作在Buck状态时进行建模。
式(1)描述了双向DC-DC变换器工作在电流连续工作模式下,开关导通时,以电容电压和电感电流为状态变量的状态空间模型[8]:
式(2)描述了双向DC-DC变换器工作在电流连续工作模式下,开关断开时,以电容电压和电感电流为状态变量的状态空间模型[9]:

其中1x和2x分别代表Buck变换器的电感电流和电容电压,E、L、R、C分别代表电源电压值、电感值、电阻值以及电容值。
状态空间平均方程为:

将式(1)和式(2)带入式(3),可得Buck变换器的状态空间平均方程为:

2 滑模变结构控制器设计
2.1 滑模变结构控制的定义
滑模变结构控制的定义如下[10]:
对于非线性控制系统

并且寻求变结构控制

(1)满足到达条件,在有限的时间到达切换面;
(2)滑动运动渐近稳定。
由以上要求可知,要使得滑模变结构控制能够在有限的时间内到达滑动模态,控制器必须渐近稳定[11]。
2.2 DC-DC变换器滑模变结构控制器设计
滑模变结构控制器设计的首要任务是设计滑模超平面[12],根据文献[13],选择如下滑模超平面:

其中2x为电容电压,α为滑模面系数,2refx为输出期望值。
在滑模超平面确定之后,需要推导控制律,根据滑模面上运动条件可知:

将式(4)带入式(6)整理可得:

其中,equ ∈(0,1)为受限控制,此时equ等于PWM的占空比。
从而可得到等效控制为:

由于开关元件存在惯性以及延时因素,实际控制律应为[14]:


其中,1K和2K为滑模变结构控制器的控制参数,为实际等效控制律。等价于PWM调制控制的占空比。
2.3 变结构控制的稳定性与参数选择
变结构控制的参数选择主要针对α、1K和2K展开,为了方便对系统进行分析,进行坐标变换使DC-DC系统的平衡点位于坐标原点,坐标变换结果如式(15)所示:

令x1=e1, x2=e2带入式(16)可得坐标变换后的方程:

根据李雅普诺夫第二定理选取李雅普诺夫函数为[15]:

由式(19)可知()V x在原点附近某邻域是正定的,为保证所设计的控制器稳定,必须使()V x的导数在原点某个邻域内负定,即:

将式(18)写成分段形式带入(17)可得:

根据文献[5],在保证式(21)成立的条件下,为了取得良好的动态效果,滑模系数α>并且不能大太多。
K1, K2需满足:0≤K2≤fs,0≤K1≤K2,其中,fs为开关器件频率。
3 仿真验证
为了验证双向DC-DC变换器滑模变结构控制的可行性,选取双向半桥DC-DC变换器为研究对象,使用MATLAB中的Simulink仿真工具进行仿真研究,DC-DC变换器电路参数选取如下:
L=1.86mH,C=1000μ F,R=20Ω,E=300V ,期望输出电压Vref=150V,MATLAB/Simulink中仿真结构框图如图2所示。
滑模变结构控制器框图如图3所示。
开环控制和滑模变结构控制的DC-DC变换器阶跃响应曲线如图4所示。
从图4可以看出,Buck型开环曲线是稳定的,然而开环超调量σ=73%,并且振荡比较严重,调节时间过长,这种响应效果明显不能满足工程需求。与开环控制相比,滑模变结构控制能够在大幅度减小电压输出超调量的同时,明显改善系统的调节时间,可以使DC-DC变换器的动态性能得到大幅度提升。
为验证滑模变结构控制DC-DC变换器系统的鲁棒性,在系统运行到0.5s时,将期望输出电压由150V在很短时间内迅速提升到200V,开环控制和滑模变结构控制电压跟随曲线如图5所示:

图2 仿真结构框图

图3 滑模变结构控制器框图
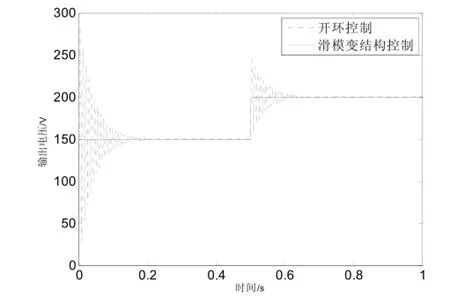
图5 电压跟踪曲线
从图5可以看出开环控制和滑模变结构控制均能跟踪电压变化,但与开环控制相比,滑模控制能够得到良好的动态响应,其鲁棒性优于开环控制。
4 结论
本文使用状态平均法建立了双向半桥DC-DC变换器的数学模型,以DC-DC变换器工作在Buck状态为例,设计了基于滑模变结构控制的DC-DC变换器的控制器,并保证系统的稳定性。仿真实验表明滑模变结构控制性能远远优于开环控制,其不仅能够得到良好的动态响应,系统的鲁棒性更是远远优于开环控制。通过分析可知滑模变结构控制算法会在滑模面切换附近产生高频抖振,如何将抖振消除将成为下一步工作的重点。
(责任编辑 吕春红)
[1] 马莉,王常青,丁世宏,等.Buck型功率变换器无抖振滑模控制器设计[J].农业机械学报,2016,47(5):388-394.
[2] 李军红,王飞,李兰君. Buck变换器滑模控制的研究与实现[J].电源技术,2010,34(02):190-192.
[3] 陈培育,闫海云,李国栋.一种高增益DC-DC变换器拓扑的研究[J].电气传动,2016,46(09):12-15.
[4] 周易,罗文广.双向DC-DC变换器拓扑结构的设计及仿真[J].自动化博览,2012,25(6):45-48.
[5] 赵成勇,李路遥,翟晓萌.新型模块化高压大功率DC-DC变换器[J].电力系统自动化,2014,38(4):72-78.
[6] HE Y, LUO F L. Sliding - mode control for DC- DC converters with constant switching frequency [J]. IEE CTA, 2006, 1539(1):37-45.
[7] AHMED M. Sliding mode control for switched mode power supplies [D]. Finland: Lappeenranta University of Technology, 2004.
[8] 刘金锟.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005
[9] 许海平.大功率双向 DC-DC 变流器拓扑结构及其分析理论研究[D].北京:中国科学院研究生院,2005.
[10] 武伟,谢少军,张曌,等.基于MMC双向DC-DC变换器的超级电容储能系统控制策略分析与设计[J].中国电机工程学报,2014,34(27):4568-4575.
[11] 齐亮.基于滑模变结构方法的永磁同步电机控制问题研究及应用[D].上海:华东理工大学,2014.
[12] 徐令宇.电流源型双向DC-DC变换器的研究[D].北京:北京理工大学,2015.
[13] 朱俊杰,粟梅,王湘中,等.分段式滑模变结构无刷直流电机直接转矩控制[J].仪器仪表学报.2013,34(11):2634-2640.
[14] 张晓光.永磁同步电机调速系统滑模变结构控制若干关键问题研究[D].哈尔滨:哈尔滨工业大学,2014.
[15] 杨龙月,刘建华,王崇林.有源电力滤波器精确反馈线性化准滑模变结构控制[J].中国电机工程学报,2014,33(34):5868-5875.
DC - DC Converter Sliding Mode Variable Structure Controller Design
LI Hao,et al
(Henan Institute of Technology, Xinxiang 453003, China)
This article t o a two-way half bridge DC - DC converter as the research object, using the state average method to establish its mathematical model, on this basis, the introduction of the sliding mode variable structure control, and verify the stability of the controller. Built in MATLAB/simulink model, comparison of open loop control with sliding mode variable structure control effect, the simulation results show that the sliding mode variable structure control can obtain good dynamic performance, and has strong robustness, and greatly improve the control performance of DC - DC converter.
DC-DC converter; the sliding mode variable structure control;robustness; MATLAB
TP23
A
1008–2093(2016)06–0004–05
2016-10-13
河南省教育厅重点科技研究项目(16A413005)
李昊(1987―),男,河南许昌人,助教,硕士,主要从事自动化技术及设备研究。
