嵌入式PLC与现场总线的机械装备监控系统设计
2016-01-08李剑斌,公丕平,孙琰等
嵌入式PLC与现场总线的机械装备监控系统设计
李剑斌1,公丕平2,孙琰1,杨小强1
(1.解放军理工大学,江苏 南京 210007;2.工程兵学院,江苏 徐州 221004)
MonitoringSystemofEngineeringMachineBasedonEmbeddedPLCandFieldBus
LIJianbin1,GONG Piping2,SUN Yan1,YANG Xiaoqiang1
(1.PLAUniversityofScienceandTechnology,Nanjing210007,China;2.PLACollegeofEngineeringCorps,
Xuzhou221004,China)
摘要:某重型机械化桥采用SPT-K-2023和SPT-K-2034嵌入式软PLC控制器,作为电液控制系统的核心部件。一个作为主控制器,另一个为辅控制器,由主控制器直接驱动负载敏感电液比例多路电磁阀,通过CANopen总线实现2个控制器、主控盒和作业显示终端的组网,与液压、机械系统配合完成机械化桥的架设与撤收。同时,控制器通过传感器感知外界环境信息,在线监测作业参数,实现了架设过程中的故障报警与安全防护。
关键词:机械化桥;软PLC控制系统;CAN总线;电液比例多路阀
中图分类号:TH213.3
文献标识码:A
文章编号:1001-2257(2015)04-0040-04
收稿日期:2014-12-18
基金项目:江苏省青年科研基金资助项目(BK2012061)
作者简介:李剑斌(1990-),男,山东诸城人,硕士研究生,研究方向为装备保障与故障检测;公丕平(1985-),男,山东临沂人,教员,研究方向为工程装备使用与维修。
Abstract:The embedded PLC SPT-K-2023 and SPT-K-2024 are used as key units of electric-hydraulic control system of heavy mechanized bridge. One of PLC controller is master and the other is slave. The master controller drives the load-sensing proportional directional spool valve. Herein,two controllers,main control chassis and display terminal are mounted to make up a network based on CANopen bus so that it can implemented bridge erection and dismounting. The PLC controllers can acquire the outside ambient information and monitor the real time operating parameters,thus it guarantees the failure warning and safety protection in the process of bridge erection and dismounting.
Keywords:mechanizedbridge;embeddedPLCcontrolsystem;CANbus;electric-hydraulicproportionaldirectionalvalve
0引言
某型军用机械化桥梁装备电控系统主要为执行机构提供操纵控制及驱动信号,与液压、机械系统配合完成桥梁的安全架设,同时具有环境感知能力,保障架设过程的安全和可靠。
嵌入式PLC系统具有体积小、成本低、抗干扰性强和可靠性高等特点,在军用现场控制中得到广泛应用。尤其是软PLC所采用的开放式模块化体系结构与所具有的网络通讯能力,使其能够完成复杂的机械装备现场监控任务,比较好地满足了机械装备现场控制系统的柔性化和开放性要求。因此,将嵌入式软PLC技术应用于电控系统的设计中,实现了电控和液压系统的功能设计。
1电控系统的组成与工作原理
作业装置电控系统由控制箱、作业显示终端(虚拟仪表)、主控盒、副控盒(移动操作盒)、指示盒、信号中继盒、前悬臂中继盒、功率输出盒及安装在车体和作业机构上的传感器等组成。从功能上分为以下几个部分。
a.传感器。包括开关量检测传感器和模拟量检测传感器等两大类,主要用来采集桥梁设备架设过程中的状态信息参数。输出信号类型有开关量信号、模拟量信号、计数脉冲信号和压差信号,直接送入PLC控制器SPT-K-2023和SPT-K-2024中。
b.控制器。接收位置检测传感器、油缸位移传感器和马达计数传感器等的开关信号、模拟信号和脉冲信号,由控制器中的CPU处理后,数据分两部分输出:一部分数据送往作业显示终端,显示油缸等的位置信息、状态报警信息等;另一部分数据送往电液比例阀等执行元件,控制油缸、马达等的动作,完成桥梁的架设和撤收。
c.显示器(作业显示终端)。作业显示终端采用显示器与主机集成设计,主要用来显示系统状态参数、桥跨连接位置的视频输入显示、架设/撤收作业向导功能及行驶导航功能。
d.操作控制。操作控制面板上设置有液压系统的操作控制手柄、切换旋钮、拨档开关、自锁按钮和指示灯等,操作人员通过这些按钮,控制桥梁的架设/撤收等。操作控制部分所产生的模拟信号和开关信号调制为CAN总线信号格式后输入到控制器,由其进行处理转换后输出到控制执行元件。
e.执行元件。采用PSL型电控比例多路阀,该阀为德国哈威公司生产,可控制液压执行元件的运动方向和无级调节独立于负载的运动速度。控制器输出PWM信号至电磁阀线圈,通过激励电流大小控制阀的流量大小,从而控制液压元件的执行速度。
PLC控制系统的原理如图1所示。

图1 PLC控制系统原理
2PLC控制系统的实现
机械化桥架设时,操纵人员主要通过操作主控盒上的前悬臂/辅助臂手柄和后摆架/推桥马达手柄,产生4路模拟量控制信号,通过CAN总线传入到控制柜,控制相关的电液比例负载敏感控制阀,使前悬臂等液压缸和推桥马达驱动桥节动作,完成机械化桥的架设和撤收等操作。由于机械化桥的架设步骤多达40步,且架设和撤收过程中设置了防误操作和限位报警功能,液压系统各执行元件的动作顺序间设置了保护功能。因而控制系统比较复杂,输入参数和输出控制参数较多,所以采用了2台嵌入式软PLC控制器。一台作为主控制器,主要完成主控盒动作参数、推桥计数传感器脉冲量、液压油缸位移传感器的数据采集和电液比例阀的控制等功能,而辅控制器主要完成液压缸位置检测传感器、液压缸位移传感器、车体纵横向倾角传感器、液压系统压力温度传感器和液压油堵塞传感器等信号的采集和处理功能。主、辅控制器及主控盒之间通过CAN总线互连,数据通讯采用CANopen协议。
2.1PLC的特点与选型
控制系统采用SPT-K系统控制器,该控制器为一种嵌入式的高性能工程机械专用软控制器,集成PLC、比例放大电路、数模/模数转换模块、继电器输出和PWM输出驱动为一体,特别适合在恶劣的环境条件下工作,该系列控制器的特点如下。
a.内置的嵌入式比例放大器,将多片阀的放大器集成为一体,输出可直接驱动电液比例阀,减少了外围辅助电路,有效提高了系统的可靠性。
b.模拟信号输入端子具备处理不同输入信号的能力,可连接电位计、热敏电阻、电流/电压信号变送器等多种工程信号,并可使用软件编程进行灵活设定。
c.基于CAN总线开发,提供了CANopen与CAN2.0两种总线接口,便于使用多个控制器组网。
由于机械化桥的液压系统比较复杂,共有14个开关量输入,2个脉冲量输入,4个模拟量输入,8个PWM输出,另有主控盒上的控制手柄和操作开关的信号输入,控制点多,控制逻辑复杂,因此采用2台控制器(SPT-K-2023和SPT-K-2024),构成主从式结构。另外,设置了作业显示终端,进行状态参数的显示和架设/撤收过程参数的显示。各个部分之间通过CAN总线连接。
2.2控制器资源配置
控制器的I/O资源配置如表1和表2所示。
表1SPT-K-2023的I/O资源配置表
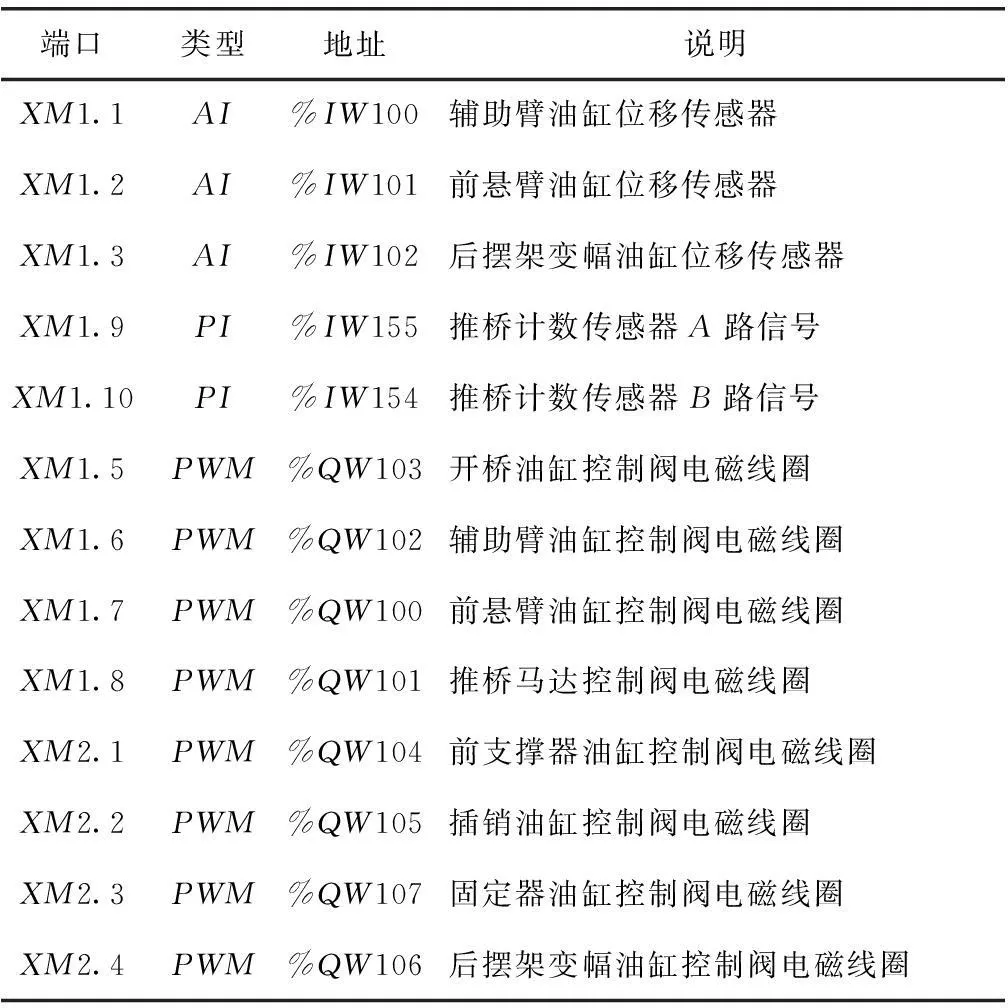
端口类型地址说明XM1.1AI%IW100辅助臂油缸位移传感器XM1.2AI%IW101前悬臂油缸位移传感器XM1.3AI%IW102后摆架变幅油缸位移传感器XM1.9PI%IW155推桥计数传感器A路信号XM1.10PI%IW154推桥计数传感器B路信号XM1.5PWM%QW103开桥油缸控制阀电磁线圈XM1.6PWM%QW102辅助臂油缸控制阀电磁线圈XM1.7PWM%QW100前悬臂油缸控制阀电磁线圈XM1.8PWM%QW101推桥马达控制阀电磁线圈XM2.1PWM%QW104前支撑器油缸控制阀电磁线圈XM2.2PWM%QW105插销油缸控制阀电磁线圈XM2.3PWM%QW107固定器油缸控制阀电磁线圈XM2.4PWM%QW106后摆架变幅油缸控制阀电磁线圈
表2SPT-K-2024的I/O资源配置表

端口类型地址说明XM1.1DI%IX1.4开桥位接近开关信号XM1.2DI%IX1.5开桥原位接近开关信号XM1.3DI%IX1.7限出位开关信号XM1.4DI%IX1.6桥节原位开关信号XM1.7DI%IX0.0固定器固定位开关信号XM1.8DI%IX0.1固定器原位开关信号XM1.14DI%IX0.3丙丁落位检测开关信号XM1.15DI%IX0.2插销油缸原位开关信号XM1.16DI%IX1.3插销油缸插销位开关信号XM1.17DI%IX1.2出油滤清器堵塞XM1.22DI%IX1.1回油滤清器堵塞XM3.13AI%IW110温度传感器电流输入XM3.5AI%IW106压力传感器XM3.6AI%IW107横向倾角传感器XM3.7AI%IW108纵向倾角传感器
2.3电液比例阀的驱动方式
机械化桥所有电磁阀的工作电压均为24V,负载敏感多路换向阀每联电磁阀的工作电流小于3A,可由PLC直接驱动阀芯动作。SPT-K-2023嵌入式PLC的PWM输出采用大功率MOS管图腾柱结构的推动级方式,输出引脚的特性为“正向电流输出型”。
嵌入式PLC的PWM输出口可以直接驱动电液比例阀。控制手柄操作电磁阀时,PLC采集角度传感器信号,经处理后改变PWM的输出驱动电流值,从而达到调整电液比例换向阀开度大小的目的。在控制过程中,PLC通过内置采样电阻来获取驱动电流的反馈信息,因此双向电液比例阀电磁线圈的驱动电路接线需采用2个输出引脚。由于双向电液比例阀的2个电磁线圈不会同时通电工作,所以对其驱动可采用3个引脚的接线方式,2个引脚接线圈的驱动输入接头,而第3引脚的电流返回线由2个驱动引脚共用。每个PWM电流返回引脚都具有单独的地址,能够与8个PWM输出端口的任何一个配合。为保护PLC输出级的CMOS功率管,在电液比例阀的电磁线圈端口上必须并联续流二极管,其接线方式如图2所示。

图2 双向比例阀的驱动接线
3嵌入式PLC的操作系统软件设计
3.1SPT-K控制器的初始化
基于CANopen协议的网络为主从式结构,网络中的节点号最小的控制器设置为主模式(MASTER),其他的节点设置为辅助(SLAVE)模式,这是因为节点号越小,控制器的优先级越高。系统使用标准的CAN数据格式,ID为11位,有效数据长度为8个字节,CANopen数据结构为“CANID,DLC,D0,D1,D2,D3,D4,D5,D6,D7”。
如果控制器需向CAN总线上发送数据,那么在初始化完成后,控制器从虚拟节点往总线上发送4帧TPDO(CANOPEN_START_INIT、CANOPEN_END_INIT),第1帧PDO数据的ID为“0X180+控制器的节点号”,随后3帧依次为“0X280”、“0X380”和“0X480”与控制器的节点号相加。
如果发送时数据没有变化,则每隔300ms控制器向总线发送1次数据。如数据变化了,则控制器会立即将更新后的数据发送到总线上。
3.2操作系统软件设计
操作系统程序基于CoDeSys开发环境编写,并按功能块结构进行程序设计。
模块之间通讯程序的编写,包括CAN总线的初始化、PDO数据的发送、PDO数据的接收和参数设定等。根据系统需求与特点,将EPEC2023的节点ID定义为1,EPEC2024的节点ID定义为4,主控盒节点定义为3。由于作业显示终端只需要从总线上接收信号而无输出信号,因而不需要定义节点ID。
标度变换功能块、故障处理与报警功能块、逻辑互锁功能调用模块和数据显示模块,主要完成坐标参数与状态参数的变换,故障的处理和报警、机械化桥架设与撤收过程中的顺序保护、互锁和防误操作,以及液压系统状态参数、车体倾斜、GPS导航等信息的显示等功能。
通过功能模块调用,在机械化桥的行走、架设、撤收和导航等工况下,根据系统要求,保证电控系统的正常运行,控制液压系统按要求实现自动、手动和车外远程操作等。
4结束语
选用嵌入式PLC完成了军用装备的现场监控与自动化操作系统的设计,在系统设计中进行了通信总线的选型与实验,实现了控制器、数据采集传感器和现场总线的优化匹配。研制过程中发现,对于机电液等复杂的军用工程装备,总线和传感器的匹配非常重要,考虑到作业现场的恶劣环境,采用CAN总线、高可靠性的进口接近开关和嵌入式PLC为核心,组成测控系统,才能满足军用装备的使用需求。本研制方案为同类工程机械的现场监控、无人化操作和智能化改造,提供了重要的技术参考。
参考文献:
[1]徐楷.PLC在压路机远程监控系统中的应用.工业控制计算机,2007,20(12):79-80.
[2]刘韦,谭峰.掘进机电气系统的设计. 煤矿机械,2013,34(4):173-175.
[3]蔡艳平,成曙,徐斌,等.基于嵌入式SPT-K控制器的超声波测距系统.兵工自动化,2005,24(3):82-85.
