电机控制器的热效应模拟研究
2016-01-08胡欲立,杨树森
电机控制器的热效应模拟研究
胡欲立,杨树森
(西北工业大学航海学院,陕西 西安 710072)
Thermal Analysis Simulation Studies of Motor Controller
HU Yuli,YANG Shusen
(School of Marine Science and Technology,Northwestern Polytechnical University,Xi’an 710072,China)
摘要:电机控制器本身主要由多个电子元器件构成。在一个封闭空间里,长时间的航行导致各个电子元器件散发的热量堆积,空间温度升高,影响各电子设备的工作有效性,有可能导致电机失效。对某型号电动力水下航行器的电机控制器进行热分析,以验证其工作的有效性,通过模拟不同航速下航行器的运行情况并进行热分析,确保了电机控制器工作的可靠性。
关键词:电机控制器;电子元器件;热分析;可靠性
中图分类号:TP391.9
文献标识码:A
文章编号:1001-2257(2015)04-0015-03
收稿日期:2014-12-09
作者简介:胡欲立(1963-),男,湖南湘乡人,教授,博士研究生导师,研究方向为水下动力推进技术;杨树森(1987-),男,吉林临江人,硕士研究生,研究方向为热能工程,机械热分析。
Abstract:Motor controller is mainly composed of various electronic components. The space temperature caused by the heat accumulation which is dissipated by electronic components in a closed space for long time navigation can affect the effectiveness of electronic components. It is possible to negate the effects of the motor. In this paper,the thermal analysis for the motor controller of a certain type electric power underwater vehicle is done to verify its effectiveness. Under different speed simulated the operation of aircraft in the thermal analysis to ensure the reliability of the motor controller.
Key words:motor controller;electronic components;thermal analysis;reliability
0引言
随着世界各国潜艇和水面舰艇性能的大为改善,各种对抗水下航行器技术的进步,诱骗、干扰和迷惑等措施,使水下航行器命中的难度增大,特别是攻击对象航速有了较大的提高,这就要求水下航行器必然朝着高航速、远航程和高性能的方向发展。
水下航行器航速和航程与其动力系统性能直接相关,对于热动力水下航行器来说,发动机是航行器热动力系统的核心,而电动力水下航行器的热动力系统核心则是电机。电动力水下航行器电机及其控制器均是大功率器件,其工作过程中不可避免的会产生多种损耗,并以热量的形式散发出来。电机控制器中包含了多种电子元器件,其工作性能受温度影响很大,大量的热量聚集导致温度升高,其直接结果就是元器件失效、甚至损坏。水下航行器由于其特殊性,空间狭小,每个子系统的空间都不大,在这样一个大功率和高度密闭的条件下,电子设备的温度会迅速升高,引起设备失效的情况也会越来越多。研究表明,随着温度的增长,芯片失效率有成指数增长的趋势,因此,需要对电机控制器进行可靠的热分析和热设计,实施有效的热控制措施是提高设备工作可靠性的关键措施。
1电机控制器
就目前而言,永磁无刷直流电动机控制器结构已有多种形式,由最初复杂的模拟式到近来以单片机为核心的数字式。新型电机控制专用芯片的出现,给无刷直流电机调速装置设计带来了极大的便利,这种集成模拟控制芯片控制功能强、保护功能完善、工作性能稳定,组成的系统所需外围电路简单,抗干扰能力强,特别适合用于对控制器体积、价格性能比要求较高的场合。专用控制芯片优点固然多,但往往价格比较昂贵。在一些控制精度要求不是很高的场合,就需要有一种工作稳定,价格又相对便宜的控制器。
在此,分析了某型水下航行器所使用的电机控制器,其组成部分主要有IPM功率模块、DC/DC电源转化模块、电源模块、电机控制电路板、电机控制板电源板和功能芯片等。
IPM(智能功率模块)是变频调速系统中的主电路关键模块,把功率开关元件和驱动电路集成在一起,而且内置过流和过热等保护电路。电子芯片器件的失效与结温成指数关系,工作温度每提高10 ℃,局部电阻会增加10%~15%,其失效率增加1倍。
电源模块是可以直接贴装在印刷电路板上的电源供应器,其特点是可为专用集成电路(ASIC)、数字信号处理器(DSP)、微处理器、存储器、现场可编程门阵列(FPGA)及其他数字或模拟负载提供电源。所设计中电机控制器共有3块DC/DC模块,型号分别为XZR05/24S12,XZR05/24S05,XZR05/24S20。
水下航行器的供电系统电源比较单一,但是在实际中运行过程中,不同的系统、不同的部件对供电系统提供的电压要求是不一样的,所以就需要对供电电源进行电压变化,以获得不同的用户所要求的供电电压。为了能够将电压转换器应用于不同的供电场合,就需要一种能够在低压供电、高压供电或正常供电自由转换电压的电源转换电路。电源转换模块就是实现这个功能的,所选模块的型号为M57140。
2模型建立
选取UG三维建模软件来对电机控制器进行建模。对电机控制器主要元器件分别进行了建模,其中包括电机控制器壳体、IPM功率模块、DC/DC电源模块、电源转换模块、固定架、电机控制板和电机控制板电源板。部分建模元器件的尺寸如表1所示。
分别对电机控制器各个元器件及鱼雷部分壳体进行简化建模,然后通过UG自带的装配功能将元器件组装装配。装配过程中通过各种约束条件,将每一个元器件的位置与实体模型中各个元器件的位置一一对应,可得到电机控制器的模型。
对于CFD计算第一步是生成网格,即要对空间上连续的计算域进行剖分,把它划分成许多个子区域,并确定每个区域中的节点。
表1各个元器件的尺寸
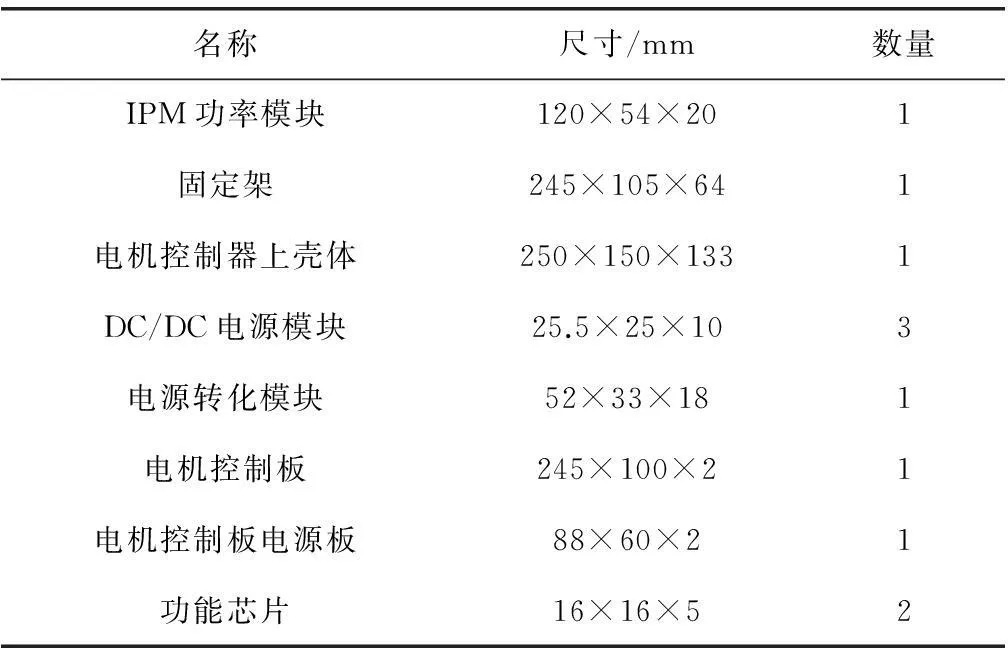
名称尺寸/mm数量IPM功率模块120×54×201固定架245×105×641电机控制器上壳体250×150×1331DC/DC电源模块25.5×25×103电源转化模块52×33×181电机控制板245×100×21电机控制板电源板88×60×21功能芯片16×16×52
由于实际工程计算中大多数计算区域较为复杂,因而不规则区域内网格的生成是计算流体力学一个十分重要的研究领域。实际上,CFD计算结果最终的精度及计算过程的效率,主要取决于所生成的网格与所采用的算法。目前,电子系统的有限元网格生成方式基本上分成2种类型:结构化网格和非结构化网格。
选用了有限元软件FLUENT对电机控制器做热分析,在进行网格划分时选取了前处理软件GAMBIT对电机控制器系统进行网格划分。划分网格时,由于电机控制器系统内部各个组成部分对温度场的影响不一样,所以选择了手动和自动结合的网格划分方式。对于需要着重考虑,受温度影响较大的部分,比如IPM功率模块、电源模块和电源转换模块等电子元器件,采取了比较密集的网格划分。而对于对整个温度场影响较小或不需要重点考虑的部分,比如电机控制器上、下壳体,鱼雷壳体,支撑平台和空气等,采取了比较稀疏的网格划分。由于计算机硬件的限制,对于网格数目的控制也比较严格,经过反复尝试,最终,对电机控制器整体的网格划分如图1所示。
图1 电机控制器的网格划分
此电机模型共有700 329个网格单元。在进行温度场分析时,IPM功率模块,DC/DC电源模块、电源转换模块和DSP芯片,都定义为体内热源,可算出各个元件的热生成q。将各个元件的热物理参数汇总,如表2所示。
表2各个元器件的热物理参数
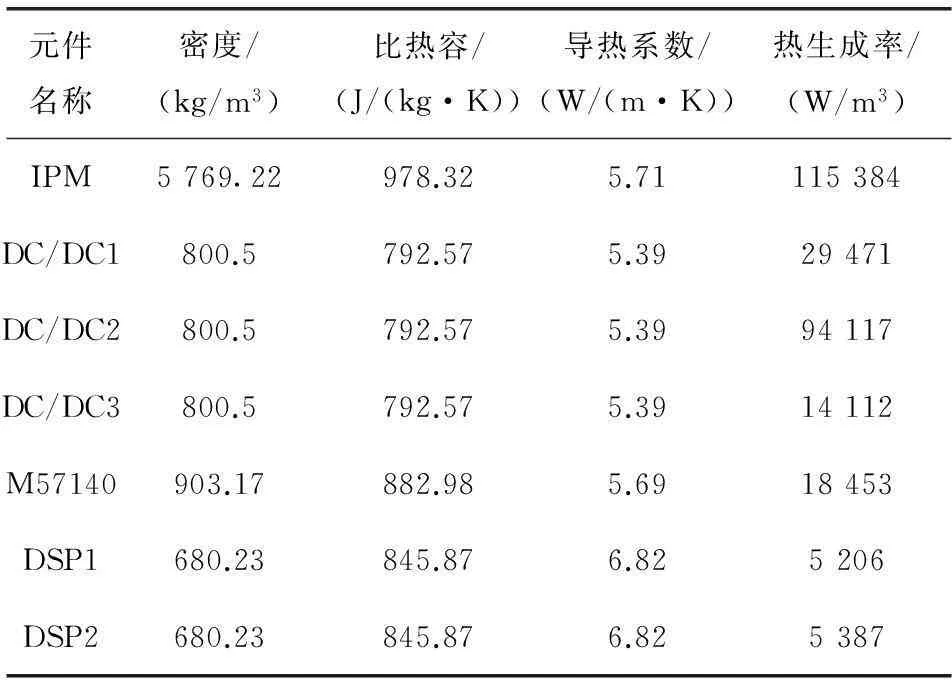
元件名称密度/(kg/m3)比热容/(J/(kg·K))导热系数/(W/(m·K))热生成率/(W/m3)IPM5769.22978.325.71115384DC/DC1800.5792.575.3929471DC/DC2800.5792.575.3994117DC/DC3800.5792.575.3914112M57140903.17882.985.6918453DSP1680.23845.876.825206DSP2680.23845.876.825387
3数值模拟结果
根据实际要求,分别对2种工况下航行器运行时电机控制器的温度场进行了仿真。航行器在高速航行7 h后(以壳体厚度10 mm为例),电机控制器壳体温度场分布(顺水和逆水)如图2所示。
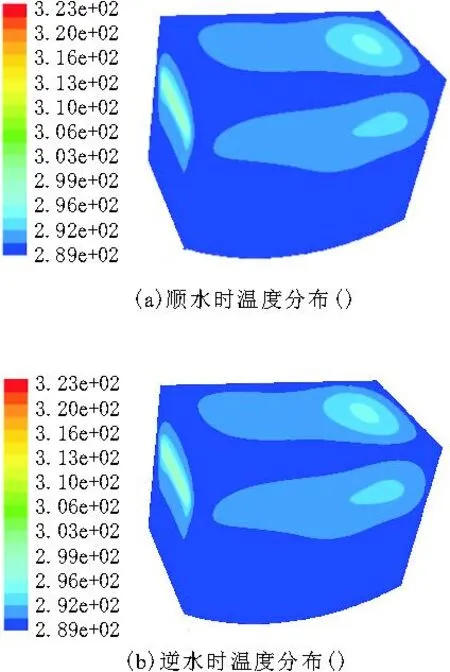
图2 电机控制器壳体温度场分布云图
从上面的结果可以看出,随着运行时间的增加,电机控制器热源散热对壳体的影响越来越小,而电机控制器下壳体因为与航行器壳体直接相连,航行器壳体与外面海水直接接触,散热性好,固体与固体之间的导热性能优于气体与固体之间的导热性能,自然对流散热对外壁的影响较小,外壁的温度变化趋于稳定。外壁与电机控制器下壳体相连,又与航行器壳体相连,认为两部件光滑连接,导热性能优异,这是电机控制器壳体温度变化不大的主要原因。在2种水流情况下运行,水流速度对电机控制器的温度分布影响相差不大,这种情况可能是由于水流速度相差不大的原因造成的。
在设计中,需要重点关注的是电机控制器内部电子元件的温升。同样,将2种水流情况下的温度分布情况放在一起比较,航行器高速航行7 h后,电机控制器内部元器件温度分布云图(顺水和逆水)如图3所示。
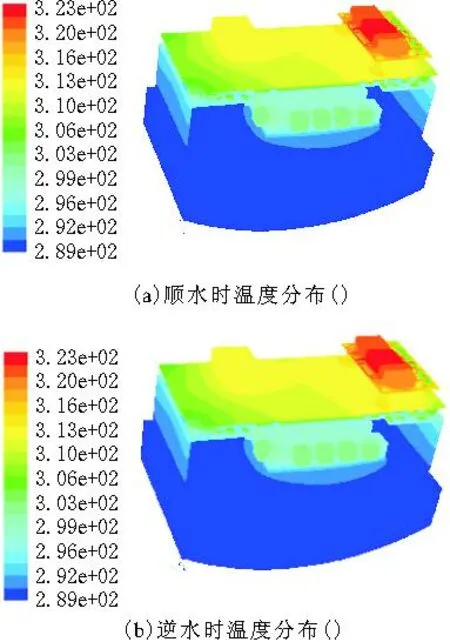
图3 电机控制器内部元件温度分布云图
从上述仿真结果可以看出,电机控制器内部电子元器件的温度随着时间的增加趋于平缓,有达到平衡的趋势。由图3可知,DC/DC模块的温度最高,其中正中间的那块DC/DC模块温度比左右两边的温度模块要高1~2 ℃。主要的原因可能有:
a.中间DC/DC模块的功率也比其他2块的功率大很多,热耗散产生的热量也要多很多,但3块DC/DC模块的大小、形状、材料是一样的,单位时间内散发出去的热量少,温度自然会升高的多一些。
b.3块DC/DC模块不是紧挨着的,中间留有比较小的缝隙,这就使得两块模块产生的热量在细小缝隙中不容易散发。
c.DC/DC模块位于电机控制器的最上端,温度升高,热空气上升,不利于热量的散发。
而电机控制器散热量最大的散热元件IPM温度升高却很小,主要原因有:
a.IPM功率模块直接与电机控制器下壳体相连,产生的大部分热量可以通过导热传导到下壳体,进而传到航行器壳体由海水带走。
b.IPM功率模块的下表面与电机控制器下壳体的上表面连接面非常光滑,导热性能好。
c.IPM附近没有散热量较大的元件对其产生影响。
4结束语
结合FLUENT软件,采用数值方法中的有限体积法,对电机控制器及其内部元器件的温度场分布进行了分析,分析了2种航行条件下,外界条件对电机控制器内温度场分布的影响,并对电机控制器内的重点散热元器件进行了点对点分析,验证了各个元器件在常规条件下工作的可靠性和稳定性。采用数值方法对封闭空间内的电子系统进行热分析,是一种行之有效的方法,通过仿真并结合少量的实验,就可以研究电子系统的热力学性能,这将大大减少实验造成的研究费用,并且可以计算出无法通过实验方法测得的数据,而这将对后续多种工况条件下电机控制器的工作稳定性提供依据。
参考文献:
[1]姜忆初.电动鱼雷用动力电源及其发展方向.船电技术,2005(5):46-48.
[2]藤聪,黄志强,禄盛,等.电动汽车用数字型直流-直流转换器设计.电源技术,2012,36(9):1337-1339.
