无人机视距链的同步牵引干扰
2015-12-30王宝堂许阳明董康华
王宝堂,许阳明,董康华
(合肥电子工程学院,合肥 230037)
无人机视距链的同步牵引干扰
王宝堂,许阳明,董康华
(合肥电子工程学院,合肥230037)
摘要:为削弱无人机的作战能力,干扰无人机视距测控链是一种低耗费的有效手段;基于同步牵引干扰UAV视距链能够以较小的功率实现干扰效能,通过截获链路信号分析重构干扰信号,完成对上行链路接收端的牵引,牵引干扰的核心是占用并牵引无人机测控系统的同步跟踪操作;分析了对测控链路实施上述干扰的可行性,并仿真分析了在牵引过程中上行链路接收端的跟踪误差。
关键词:无人机;视距;数据链;牵引干扰
无人机测控系统用于完成对飞行器的遥控、遥测、跟踪定位及信息回传,是无人机的生命线。对于测控系统的干扰[1-2]一般可以从地面站、数据链、中继站3个方面着手,而干扰无人机视距数据链是一种较为实用的手段。如美军高中空长航时无人机[3]RQ-4、捕食者等大型无人机,当飞机与地面站的距离进入视距范围之后,上行的指令、下行的侦察或飞行状态数据的传输都会切换到视距链路上,且上行链路均采用为CDL宽带数据链;如“猎人”、“先锋”等中、近程战术无人机采用TCDL数据链,这两种数据链都采用的是CDL标准,其抗干扰手段均采用了直接序列扩频(直扩)技术。
当前对于无人机测控链的干扰研究,可分为拦阻式干扰和瞄准式干扰。拦阻式[4]干扰通用性较强,对非合作测控信号先验信息要求较低,但对功率的需求很高。在军事对抗中,干扰设备的功率过高容易被敌电子对抗侦察设备发现,进而招致反辐射武器的打击,且在很多情况下大功率的干扰也难以连续不断的长时间发挥效能。瞄准式干扰对功率的要求低,平台适用范围广,但是对信号的先验知识要求详近,如窄带干扰[5]、相关干扰[6]。对于CDL标准的无人机测控链路而言,文献[4-5]中的干扰方式在目标接受端都会受到直扩接收机的噪声抑制,大大的降低了干扰效能。而相关干扰则能够规避直扩接收机的干扰抑制。文献[7]中研究的转发式干扰就属于相关干扰的范畴,但是这种干扰要求干扰信号相对于合法信号的延迟要非常小,这就大大的增强了对干扰设备的要求。
本文主要针对CDL标准的无人机视距测控链路进行同步牵引干扰,以相关干扰的优良特性结合文献[8]中研究的CDMA信号的动态竞争机制,使干扰信号即能规避直扩接收机的干扰抑制,又能与合法信号形成一种类似动态竞争的情况,令干扰信号能够以较低的功率达到更好的干扰效果,且干扰信号相对于合法信号的延时无需严格的限制。对视距链同步牵引干扰的目的在于占用目标接收机,进而使接收机的同步跟踪环锁定干扰信号,由于干扰信号的伪码相位是保持动态变化的,所以接收机将保持与较大功率的干扰信号同步,从而牵引接收机的本地伪码相位偏离合法信号。
1牵引干扰的实现方案
在C1DL体制的视距链中,主要采用扩频方式来实现信号的安全保密。当地面站向无人机发送指令时,数据链终端接收机对合法信号进行捕获跟踪,建立起通信链路并保持同步,此时接收机与地面站的本地伪码发生器的状态一致,周期性的产生同速率及同相位的伪码。对于非合作方而言,合法信号的相位瞬时状态是无法预知的,如果静态的干扰信号到达接收机时与合法信号的相位没有对齐,将一直保持这个相位差。且干扰信号与合法信号相位对齐的概率是很小的,尤其是伪码周期越大,相位对齐概率越小,静态干扰的随机性很强,可靠性较差。在接收机已经与合法信号保持同步时,若干扰信号相对于合法信号的相位是动态变化的,在某一时刻一定会出现相位对齐的情况,之后干扰信号则能以稍大的功率牵引接收机的同步跟踪操作。
无人机从起飞开始相对于地面站一直处于相对高速的运动状态,在视距范围内巡航时,地面站的遥控指令通过上行链路传递给飞机,在这种动态条件下到达接收机的合法信号会产生明显的多普勒频移。同样,干扰平台发出的相关干扰信号,到达接收机也会产生多普勒频移。多普勒频移fd可以表示为
(1)
其中,v表示地面站与无人机的相对匀速运动速度, f表示载波频率,c表示光速即无线电传播速度。由于多普勒频移在基带扩频码上的表现是伪码速率Rc的改变,关系如下:
(2)
其中:Rc表示发端的伪码速率;ΔRc表示由多普勒效应引发的伪码速率的变化。Rc+ΔRc就表示信号到达接收机前端的伪码速率,接收机对本地伪码进行补偿,保持跟踪。干扰方通过相近伪码速率的干扰信号引导跟踪操作逐渐偏离合法信号。s表示一个周期伪码调制一个比特的信息码,合法信号s由多个sa级联分布,其伪码相位可以表示为
(3)


图1 干扰信号与合法信号相位对齐
(4)
M表示相位对齐需要经过的周期个数,即与完成相位对齐所需要的时长有关,De表示干扰信号初相相对于合法信号滞后的码片数,即与延迟时间相关,De≤N。
当ΔRc′一定时
(5)
De与M成正比,即相位对齐需要的时长取决于延迟时间。
同样,当De一定时
(6)
ΔRc′与M成反比,即伪码速率变化值越大,相位对齐的时长越小。
对于ΔRc′的变化可以从两个方面入手,一是通过前期的侦察设备分析出合法信号载波的中心频率 f0,干扰信号的载频有意识的偏离f0,同时调整基带伪码速率,要求符合式(2),实现干扰信号与合法信号伪码相位的相对动态变化;二是通过控制干扰平台的移动速度使多普勒频移发生改变,如式(1)表示平台相对于接收机的运动速度与信号的多普勒频移成正比,当无人机与地面站保持径向匀速v运动且信号同步时,控制干扰平台与无人机的径向运动速度vj大于v,二者引起的多普勒频移就会有差值,映射到基带上就表现为干扰信号的伪码速率大于合法信号。
2牵引干扰的理论分析
在接收机本地的伪码与合法信号已经保持同步的情况下,当干扰信号相对于合法信号动态变化到有局部相位对齐时,接收机对干扰信号的处理增益很小,跟踪环路就会逐渐跟踪到功率相对较大的干扰信号上。由于接收机伪码相位逐渐偏离合法信号,所以最终合法信号将会被接收机视为“干扰”,证明如下:
设,接收端的合法信号表示如下
(7)
其中,P表示合法信号的功率,dh(t)表示信息码,ch(t)表示伪随机码,f0表示载频,φj表示载波相位,fdh表示合法信号到达接收机前端时的多普勒频移。
(8)
其中,Pj表示干扰信号的功率,dj(t)表示信息码,cj(t)表示伪随机码,f0表示载频,φj表示载波相位,fdj表示干扰信号到达接收机前端时的多普勒频移, fdx=fdj-fdh表示相对多普勒频移。
在接收机与合法信号保持同步过程中,相关函数是捕获跟踪的标尺,接收机本地信号与捕获的合法信号的相关函数表示如下:
(9)
从干扰信号与合法信号相位对齐开始,到相位逐渐偏离直到相差大于两个Tc时,干扰信号与接收机本地信号的相关函数表示如下:
(10)
假定接收机的早迟伪码跟踪环的延迟时间间隔为1/2Tc,当相关干扰信号到达接收机时,它与合法信号叠加而成的信号和接收机本地信号的相关函数可以表示为
(11)
经典的跟踪环路判定本地伪码是否与接收信号保持同步跟踪的条件是,超前支路与滞后支路的相关值相等
(12)
在整个干扰信号的牵引过程中,从某一段长度为N·Tc的干扰信号相位与合法信号相对对齐开始,干扰信号从局部相位对齐到相位逐渐偏差1.5个Tc,接收机准时支路输出的伪码保持跟踪干扰信号的伪码状态,合法信号则被误认为“干扰”。令牵引干扰的指标一个周期的接收机本地伪码与接收到的信号伪码的相似程度作为判别依据,并进行反向归一化得到就是本地伪码与接收伪码的差别。
相似度函数为
(13)

3实验仿真与分析
通过Matlab软件搭建了整个视距测控系统上行链路的仿真模型。具体信号参数如下,上行链路中合法信号的信息码恒为“1”,伪码速率为2.55kHz,载频为51kHz,采样频率为5.1MHz。干扰信号的信息码恒为“1”,伪码速率为2.55kHz+0.5Hz,载频为51kHz+10Hz,采样频率为5.1MHz,信号的长度都为50·N·Tc,Tc表示伪码码片宽度,N表示伪码码长。
图2表示,只存在合法信号,且接收机的初始伪码状态与合法信号到达接收机时的伪码状态不一致时,曲线的起始段表明接收机本地伪码与合法信号伪码相位的差异较大归一化数值为1,曲线下降段则表示本地伪码不断调整偏向合法信号,伪码差异值逐渐减小,继而完成接收端与合法信号的同步,进而持续跟踪,差异值保持为0。
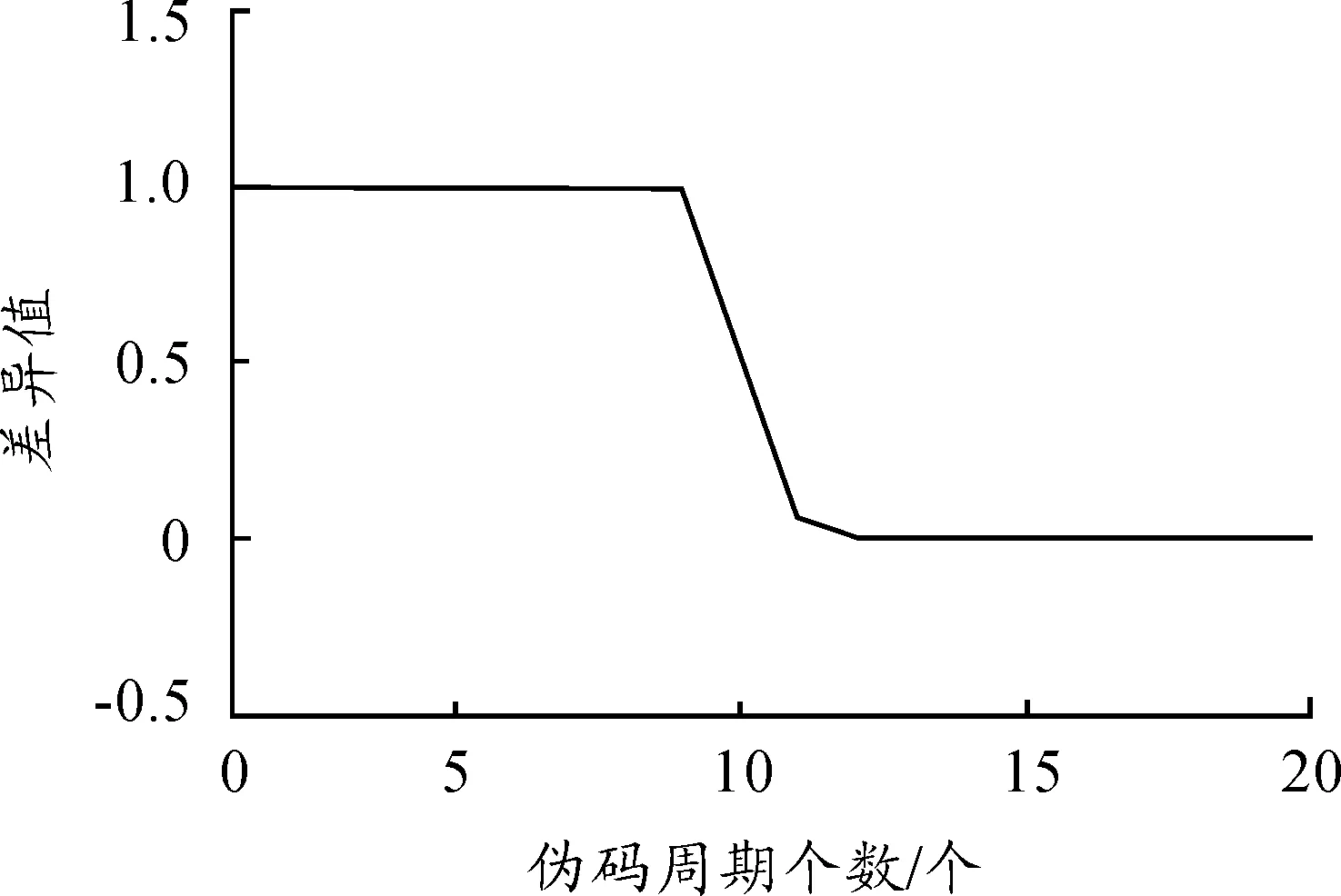
图2 本地伪码与合法信号的差异
图3表示,在延迟一段时间后注入干扰信号,本地伪码与合法信号相位的差异值。曲线初始段与图2表示的情况一致,而中间差异值为0的平稳阶段表示本地伪码与合法信号保持跟踪状态,而上升段则表示在此过程中接收机本地伪码不断调整偏向干扰信号,干扰信号相位偏离合法信号,直至二者相位偏离大于1.5个Tc后,本地伪码与合法信号伪码相位的差异值接近1并一直保持。

图3 本地伪码与合法信号的差异
图4表示,在延迟一段时间后注入干扰信号,干扰信号相位与合法信号对齐后,本地伪码与干扰信号伪码的差异曲线。初始段是接收机完成图2所包含的工作过程,所以本地伪码与干扰信号的差异值保持接近1,而下降段则表示在这个过程中接收机本地伪码不断调整偏向干扰信号,干扰信号相位偏离合法信号,直至二者相位偏离大于1.5个Tc后,本地伪码与干扰信号的差异值为0,干扰信号完成牵引操作。
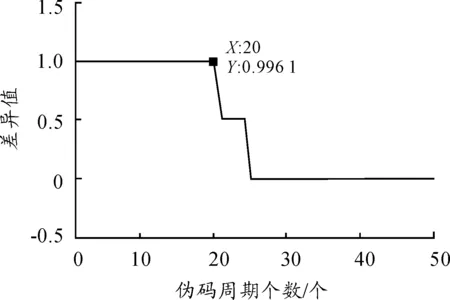
图4 本地伪码与干扰信号的差异
4结论
由于无人机在现代战争中地位的迅猛提升,随之出现了多种对抗无人机的软杀伤和硬杀伤手段。本文从电子对抗的角度出发,着重阐述了对无人机的视距测控链路进行牵引干扰。通过研究相关干扰的干扰机理,对CDL标准的无人机视距链路实施牵引干扰,并且能够通过重构干扰信号的参数或者调整干扰平台的运动状态,实现对链路终端设备同步跟踪过程的牵引。文中进行了干扰方案的分析,并分析和仿真了整个牵引干扰过程中,接收端本地跟踪伪码分别与合法信号及干扰信号的差异。
参考文献:
[1]陆文博,刘春生.对无人机测控系统干扰方法的研究[J].舰船电子对抗,2013,36(2):31-34.
[2]ShepardDanielP,BhattiJahshanA.EvaluationofsmartgridandcivilianUAVvulnerabilitytoGPSspoofingattacks[C]//ION-GNSS.Nashville,TN,USA:2012.3591-3605.
[3]季华益.“全球鹰”及其对抗策略思考[J].航天电子对抗,2013,29(1):26-30.
[4]SamerS.Saab,JadG.Hobeika.ANovelPseudorandomNoiseandBandJammerGeneratorUsingaCompositeSinusoidalFunction[J].IEEETRANSACTIONONSIGNALPROCESSION,2010,58(2):874-877.
[5]BorioDaniele,O’DriscollCillian.JammerimpactonGalileoandGPSreceivers[C]//ICL-GNSS.Turin,Italy:IEEE,2013.1-6.
[6]QiZeng,HushengLi.GPSspoofingattackontimesynchronizationinwirelessnetworksanddetectionschemedesign[C]//MilitaryCommunicationsConference.Orlando,FL,USA:IEEE,2012.1-5.
[7]许益乔,曾芳玲.对M码信号的转发式干扰技术研究[J].火力与指挥控制,2013,38(10):122-124.
[8]郑建忠,易翔.DS-CDMA信号的动态竞争机制分析[J].电子信息对抗技术,2012,27(4):47-51.
(责任编辑杨继森)
收稿日期:2015-02-14
基金项目:国家自然科学基金(61171170)
作者简介:王宝堂(1989—),男,硕士研究生,主要从事信号处理、无人机测控研究。
doi:10.11809/scbgxb2015.07.031
中图分类号:TN975
文献标识码:A
文章编号:1006-0707(2015)07-0121-04
本文引用格式:王宝堂,许阳明,董康华.无人机视距链的同步牵引干扰[J].四川兵工学报,2015(7):121-124.
Citationformat:WANGBao-tang,XUYang-ming,DONGKang-hua.SynchronizationBootJammingforUAVLOSTT&CLink[J].JournalofSichuanOrdnance,2015(7):121-124.
SynchronizationBootJammingforUAVLOSTT&CLink
WANGBao-tang,XUYang-ming,DONGKang-hua
(HefeiElectronicEngineeringInstitute,Hefei230037,China)
Abstract:To weak the combat capability of unmanned aerial vehicle (UAV), it is a kind of low cost method effectively for disturbing line of sight (LOS) tracking telemeter and command (TT&C) link. Booting jamming can attain the fact of disturbing UAV LOS link effectively with smaller jamming power. Reconstruct jamming signal with link signal which was intercepted and completed boot receiving end in up-link. The core of boot jamming was booting the synchronization track in UAV TT&C system. The feasibility of the interference for TT&C link was analyzed and the track error of the boot process of up-link in receiving end was simulated and analyzed.
Key words:UAV; LOS; data link; boot jamming
【信息科学与控制工程】
