基于分类法矢量控制的感应电机转子电阻辨识
2015-12-23董素玲
董素玲, 王 真
(1.江苏建筑职业技术学院 机电工程学院,江苏 徐州221116;2.中国矿业大学 信息与电气工程学院,江苏 徐州221116)
0 引 言
随着电力电子技术和微型计算机技术的发展,感应电机矢量控制系统的控制精度、可靠性得到了很大提高,但是调速系统对电机参数值的准确度要求很高,电机参数值不准确或变动容易引起整个控制系统控制性能的下降[1],因此对感应电机矢量控制系统的电机参数进行辨识是研究的热点问题。
由于电机是非线性的时变系统,采用最小二乘法难以实现高精度的辨识[2]。而卡尔曼(Kalman)滤波器便具有更好的优势,但却无法完全保证模型的收敛性。文献[3]把异步电机转子磁链的静止坐标系下的分量和电机转子电阻值作为状态变量,使用卡尔曼滤波算法,实现了转子电阻的在线自校正。然而其计算复杂,不利于工程应用。
模型参考自适应(MRAS)是针对控制系统的不同状态量而提出的参数自适应辨识方法。文献[4]根据电机的转矩构造模型实现了转子电阻在线辨识。但是转矩的测量和构造的难度较大,实现较为困难。
此外,运用信号注入法,还可实现电机参数的在线跟踪,文献[5]就是根据向电机中注入负序电流信号实现电机参数的在线辨识。
为了提高参数辨识的精确度及其可行性,提出了基于分类算法的矢量控制系统,并在此基础上设计了基于无功功率的模型参考自适应辨识系统。
1 基于分类算法的三电平SVPWM
提出基于分类算法的三电平空间矢量脉宽调制的目的是为了有效节省处理器的计算时间以便于快速实现参数辨识。
三电平电压型逆变器的拓扑结构决定了其每相桥臂只能有Udc/2、0 和-Udc/2 3 种输出电平[6]。其空间状态矢量如图1 所示,其中含有6 个大矢量,6 个中矢量,12 个小矢量,还有3 个零矢量。12 个小矢量在空间是成对出现的,而3 个零矢量在坐标原点,因此对不同的电压矢量可以选取不同的开关状态组合而成[7]。
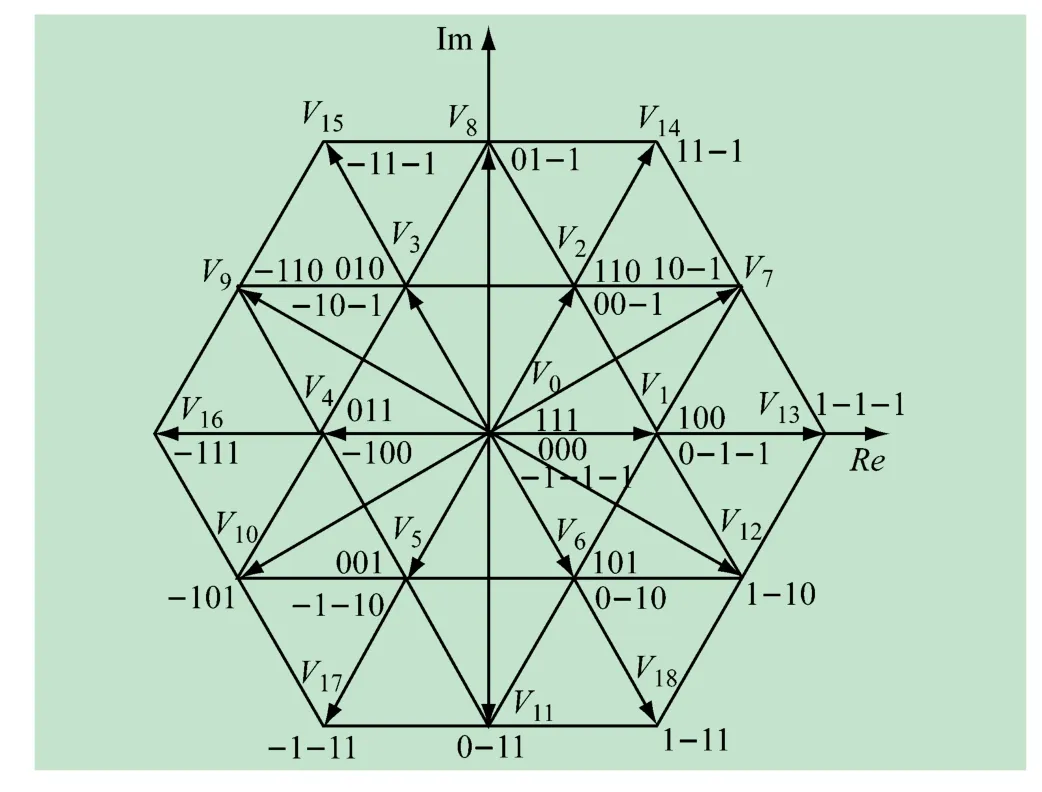
图1 三电平逆变器电压空间状态矢量图
由于SVPWM 算法计算过程中需要通过分类确定参考电压矢量由哪几个基矢量合成,且所有分类的权值都是已知的,不需要对网络的权值进行训练。图1中,va,r与6 个大矢量的内积分别为1,0.5,-0.5,-1,-0.5,0.5,这些值即为该竞争网络的权值。基于神经网络分类的SVPWM 算法较传统的SVPWM 简单、精确,结构框图如图2 所示。参考电压矢量经过6 个线性运算后,结果被送入比较单元进行处理。其中第k个计算单元的输出值等于参考电压矢量和第k 个基矢量的内积[8],即:

从式可以看出,和参考电压矢量vr最近的基矢量vk,其对应的计算单元输出值nk最大。若参考电压矢量vr落在vi和vi+1组成的扇区中,相对应的ni和ni+1将大于其他各nk值。

图2 基于网络结构的SVPWM 框图
在确定参考电压矢量所在扇区之后,首要任务就是把其他各扇区的情况划归到第Ⅰ扇区进行处理。若参考电压矢量落在第Ⅱ扇区,其变换到第Ⅰ扇区为:

在所有扇区都划归到第Ⅰ扇区后,便可以通过区域判定单元进行小区判断。
设t1、t2、t3分别为矢量v1、v7、v13的作用时间,T 为PWM 开关周期。可得:

由上式可以看出,合成基矢量的作用时间计算仅是简单的线性计算,避免了大量的三角函数,节约了处理器的计算时间。
Matlab 仿真结果如图3 和图4 所示。图示结果验证了分类算法的正确性并说明其谐波更小。

图3 传统SVPWM 波形

图4 基于分类算法的SVPWM 波形
2 电机转子电阻变化对矢量控制系统的影响
高性能感应电机矢量控制的解耦要建立在电机参数精确的基础之上,电机运行过程中的参数变化将影响磁链的准确定向,并对感应电机的电磁转矩和磁链造成影响,且转子电阻是决定转子磁场准确定向的关键[9]。
由异步电动机的dq 坐标系下的模型可得:

稳态时,多数工况下ψ'r=Lmid为常数,电动机的电磁转矩Te的一般表达式为

且电机控制过程中磁链ψr和电磁转矩Te控制是相互独立解耦的,而且电磁转矩对于q 轴转矩电流分量立刻响应,磁链对d 轴励磁电流分量的作用中间经过一阶惯性环节的作用而发生延迟[10]。当转子电阻值发生变化,则转子时间常数Tr变化,引起电磁转矩的变化,进而破坏两者之间的解耦控制。
在速度开环时电动机参数不匹配容易造成磁链和转矩的控制偏移给定值。规定右上角加“’”表示估计值,否则为实际值,加“* ”代表稳态值,则在稳态时可得:

实际的电磁转矩为:

稳态时有:

由式(7)、(8)可得电磁转矩实际值与给定值的关系:

以参数估计值为基准,定义实际电动机的互感Lm和转子电阻Rr的标幺值为:

由于实际中转子漏感值远小于互感值,所以,

把式(9)、(10)代入式(8),可得:

根据式(9)~(12)得出当电机稳态运行时,电磁转矩和转子磁链与给定值的3D 关系视图如图5 所示。可知,磁链幅值随着转子电阻的增大而增大。

图5 转子电阻变化时转矩和磁链3D 视图
在转子磁链观测的电压模型中含有纯积分环节,因此存在积分漂移问题,并且在低速时,定子电阻压降比重加大,使得观测精度降低,影响计算的精确度和系统的稳定性[11]。另外,磁链观测模型在电机轻载运行场合中运行不太理想[12]。
塑料排水板伸出级配砂砾垫层不小于0.5m,施工完成后可将排水板露出端弯折埋置于砂垫层中,同时在砂垫层中埋设盲沟和集水井,井壁随着土层的填高而随之砌高,确保软土地基中空隙水由塑料排水板排到级配砂砾垫层中,再由盲沟汇总到集水井,从而达到加速软基固结的目的。
3 基于无功功率的自适应系统参考模型
为了抑制电机参数变化对矢量控制系统性能的影响,需要对电机参数进行在线辨识。根据辨识精度和辨识收敛速度要求,选取、构造合适的模型建立自适应系统参考模型,并对自适应律加以改进,实现转子电阻的在线辨识。将该电机转子参数在线辨识方法与矢量控制系统相结合,得到带有电机参数辨识的异步电机矢量控制系统[13]。
设电动机的反电动势α,β 分量分别为

励磁电流的α,β 分量分别为imα= ψrα/Lm,imβ= ψrβ/Lm,定义瞬时无功功率为q=eis,根据转子磁链的电压和电流模型,可得无功功率为[14]:

将不含有转子时间常数的式(15)作为参考模型,将含有转子时间常数的式(16)作为可调模型。上述模型中当各个变量和参数为其真实值时,式(15)、(16)的运算结果应该相等。而式(16)中转子磁通是由观测器得到的值,而转子电阻是时变的且难以测量的参数,因此计算得到的瞬时无功功率就会存在误差[15]。
鉴于此,提出在同步旋转坐标系下进行无功功率的分析,在同步旋转坐标系中感应电机定子电压方程可以表示为:

感应电机的瞬时无功功率可以表示为

将式(17)、(18)带入(19),无功功率表达式可以改写为:
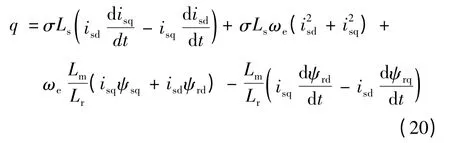
在稳态运行时式(20)可以简化为:


式(19)中不含有转子时间常数,作为参考模型,而式(22)中含有转子时间常数,作为可调模型。此模型的优点是参考模型中不含有易受温度变化而参数值发生变化的电感、电阻等参量,而可调模型中仅仅含有定子电感和漏感,从而可以更加准确地辨识转子时间常数。且已知自适应规律是一个比例加积分的结构。为了便于工程应用,直接使用比例积分结构对瞬时无功功率的误差进行调节以辨识转子电阻,在忽略转子电感变化的情况下,可以得到转子电阻:

根据式(19)和式(22)可以得到基于瞬时无功功率的模型参考自适应转子电阻辨识方法的原理图,如图6 所示。

图6 转子电阻辨识框图
采用Popov 超稳定性理论来证明自适应辨识系统的稳定性。将图6 转为等价的非线性系统框图,如图7 所示。在图7 中,非线性时变反馈方块输入和输出的表达式分别为:且等价反馈方块满足Popov 积分不等式:

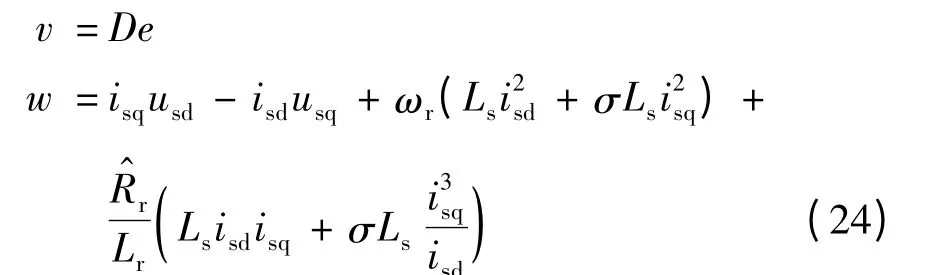

图7 参数辨识的标准反馈系统
假设系统带有速度传感器,而且速度是准确的,并且转子、定子和励磁电感在运行过程中,基本不变,忽略磁路饱和,可得:

当实际转子电阻大于设定值时,实际转子磁通大于估计的转子磁通,所以实际定子励磁电流大于计算得到的定子励磁电流,反之亦然。换言之,转子电阻的误差与转子磁通的误差和定子励磁电流的误差之间成正比。所以,根据式(26)瞬时无功功率的模型差可以很好地反映转子电阻的误差。因而,基于瞬时无功功率的转子电阻辨识方法是可以有效辨识转子电阻,并且通过Popov 超稳定性理论可以证明系统是稳定的。
4 仿真与实验结果分析
带有转子电阻在线辨识的异步电机矢量控制系统框图如图8 所示。

图8 转子电阻在线辨识的异步电机矢量控制系统
通过基于无功功率模型的转子电阻在线自校正算法的理论分析,可知相对于转子磁链模型,对定子电阻的变化具有良好的鲁棒性,并更适合于电机在低速运行的场合。在仿真中转子电阻阻值设定为可变的,转速给定为300 r/min 满载启动,分别对转子电阻阶跃上升变化、阶跃下降变化、自然指数变化、线性变化做在线自校正辨识的仿真实验,验证该方法对转子电阻变化的在线跟踪能力,仿真效果图如下图9 ~12 所示。

图9 阶跃上升变化时辨识结果

图10 阶跃下降变化时辨识结果

图11 指数形式变化时辨识结果
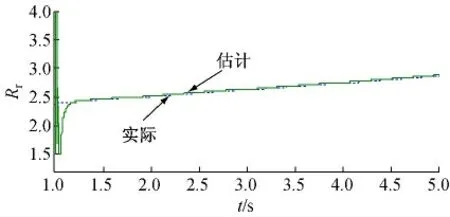
图12 线性变化时辨识结果
从图9 ~12 可以看出,当转子电阻发生阶跃变化、指数形式变化、线性变化时,此辨识系统能够很好的跟踪转子电阻的真实值,收敛速度快、相对误差小。为了进一步分析转速和负载转矩对系统辨识精度的影响,对不同转速和转矩下的转子电阻在线辨识进行了验证,并对自校正系统对定子电阻的鲁棒性进行了仿真,如下图13、14 所示。

图13 不同负载情况下的辨识结果

图14 转速不同时的辨识结果
从图13 可以看出,在转速给定不变而负载转矩不同的情况下,负载的变化对转子参数的辨识有较大的影响。负载转矩越大,辨识的结果越准确,并且收敛速度较快,而负载转矩越小,辨识收敛速度越慢,辨识结果波动越大,偏差越大。从图14 可以看出,在负载转矩不变而电机转速给定不同的情况下,转子电阻可以收敛到真实值,速度越高,辨识结果越精确,收敛速度越快,而当电机转速较小时,收敛速度较慢。
实验波形如下所示:
在电机启动后,转子电阻辨识算法就很快的跟随到实际值,并且稳态时,在线辨识值和真实值基本重合,误差很小,为了分析电机的转速对辨识结果的影响,使电机运行状态由15 Hz 变化到10 Hz,在电机转速发生变化时,在线辨识的结果基本不受影响,具有很强的收敛性及鲁棒性。
5 结 语
本文通过构建基于无功功率下的自适应系统参考模型完成了对转子电阻的高精度辨识。所设计的模型不受电机参数的影响,具有很强的鲁棒性。同时,为了便于工业应用,设计了基于分类算法的矢量控制系统,将电压矢量的组合转变为线性计算,节约了计算时间,提高了参数的跟随性能。所构建的整套系统可以完成对电机的参数辨识及矢量控制,具有很强的工业应用性。
[1] 陈振锋,钟彦儒,李 洁. 感应电机参数辨识三种智能算法的比较[J]. 电机与控制学报,2010,14(11):7-12.
[2] Khaldi B S,Grouni A,S Boukhetala D. An Approach for Rotor Time-constant Adaptation with FOC Induction Motors Drives[J].Power Electronics,2006,21(2):495-504.
[3] 赵 歆,王明渝,刘述喜. 基于扩展卡尔曼滤波器的异步电机矢量控制系统的转子电阻辨识[J]. 电机与控制应用,2009,36(3):18-23.
[4] 樊 扬,瞿文龙,陆海峰,等. 基于转子磁链q 轴分量的异步电机间接矢量控制转差频率校正[J]. 中国电机工程学报,2009(9):62-66.
[5] 徐占国,邵 诚,冯冬菊. 基于模型参考自适应的感应电机励磁互感在线辨识新方法[J]. 中国电机工程学报,2010(3):71-76.
[6] 张 志,谢运祥,乐江源,等. 二极管钳位型单相三电平逆变器空间矢量脉宽调制方法[J]. 中国电机工程学报,2010(27):62-68.
[7] 葛东霞. 基于Matlab 建模的永磁同步电机SVPWM 控制性能仿真研究[J]. 实验室研究与探索,2013(4):246-249.
[8] 吴学智,刘亚东,黄立培. 三电平电压型逆变器空间矢量调制算法的研究[J]. 电工电能新技术,2002,21(4):16-19.
[9] 王晓琳,邓智泉. 无轴承异步电机磁场定向控制策略分析[J].中国电机工程学报,2007(27):77-82.
[10] Beguenane Rachid,Benbouzid Mohamed El Hachemi. Induction motors thermal monitoring by means of rotor resistance identification[J]. Energy Conversion,IEEE Transactions on,1999,14(3):566-570.
[11] Villazana S A,Seijas C O,Caralli A,et al. Rotor Resistance Estimator Using Support Vector Machines and Model Reference Adaptive System [C] ∥Industrial Electronics, 2006 IEEE International Symposium on,2006:2417-2421.
[12] Holtz Joachim,QuanJuntao. Sensorless vector control of induction motors at very low speed using a nonlinear inverter model and parameter identification [J]. Ieee Transactions On Industry Applications,2002,38(4):1087-1095.
[13] 张春朋,林 飞,宋文超,等. 基于定子电流矢量定向的异步电机转子磁链估计器及其应用研究[J]. 中国电机工程学报,2003,23(8):155-158.
[14] 罗振中,朱建林,谭平安,等. 基于Simulink 基本元件的鼠笼式异步电机仿真研究[J]. 湘潭大学自然科学学报,2004,26(2):85-87.
[15] 杨 燕,曹建光,田志宏. 交流电机模型参考自适应控制系统的仿真[J]. 电气传动,2007(5):13-15.