计算机数字图像技术在AUV水下管道检测中的应用
2015-12-16高本国
高本国
(昆明船舶设备研究试验中心,云南昆明,650061)
计算机数字图像技术在AUV水下管道检测中的应用
高本国
(昆明船舶设备研究试验中心,云南昆明,650061)
本文主要研究了计算机数字图像技术在对AUV拍摄的水下管道图片处理过程中的作用。主要对质量较差的水下图片进行了灰度变换、直方图处理以增强其对比度,使得图像更为清晰,然后采用高斯滤波和图像分割技术对数字图像进行了提取,获得了图像的特征参数,以此可以初步实现管道图像的计算机解读。从图像处理的效果来看,通过本文的处理方法,模糊的水下图像可以转化为供机器视觉系统提取的准确的数字图像,这为进一步的理解图像信息,以进行AUV的自主光学管道跟踪与航路规划等提供了技术基础。
计算机数字图像技术;AUV;水下管道检测
0 引言
近年来随着陆地资源的消耗和人口的激增,人们越来越重视海洋资源的探索和开发。在此背景下自主式水下机器人(Autonomous Underwater Vehicle,AUV)技术获得了人们越来越多的重视,特别是在水下输油管道的巡检工作中,AUV正获得越来越多的应用。
与声呐成像技术相比,水下光学成像技术虽然可视觉距离较近(光在水下衰减较快),但其在近距离生成的图像细节较清晰、直观。应用在水下管道检测与跟踪系统中,可根据图像直接分析裸露管道的状态,判断管道的腐蚀和破坏程度,给施工者提供直观参考材料;而且水下光成像还可以实现高速成像,以满足于水下机器人应用平台的高实时性要求。因此,如何将水下摄影机所拍摄的图像进行数字化处理,以提高其图像质量,并将其所蕴含的信息进行提取和解读,以供AUV进行水下目标的识别与跟踪有着重要的意义。
由于水下成像的特殊性,一般来说水下所成的图像质量较差,典型的水下图像有以下特点:(1)灰白效应。(2)对比度低。(3)清晰度差别较大。(4)图像效果较差。
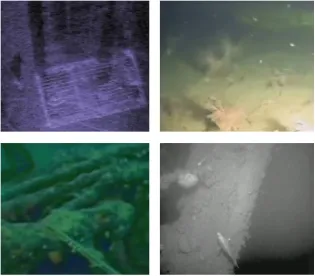
图1 典型的水下图像
图1是几幅比较典型的水下图像,可以看到,水下图像的对比度都较低,图像中目标体的噪声严重,边缘模糊,此外受到水下光照条件的影响,水下图像的清晰度差别较大,存在明显的灰白效应。
针对水下图像的这些特点,本文利用灰度变换、直方图处理、高斯滤波、模糊增强和图像分割等计算机图像技术对其进行处理,以获得可以为AUV控制终端直接分析和理解的信息,以供其进行管线追踪和航线轨迹规划,本文的主要研究思路如下:
1 计算机数字图像技术在管道识别中的应用
1.1 灰度变换与直方图处理
在获得水下摄影图片后,AUV的图像控制处理中枢会对样片进行质量预判,将部分成像失败或者成像质量较差的底片去除,筛选出相对清晰的原始底片,供下一步处理模块处理。
由于水下CCD摄像头最初获得的为RGB真彩图像,其信息量较大,不适合做图像处理,因此需要将其进行灰度转换。由于水下图像具有灰白效应和对比度低的特点,在获得水下图像的灰度图像后,还需要对其进行对比度增强,以提高其清晰度,这通常采用压缩图像的灰度范围来实现,本文采用公式(1)来对原始灰度图像进行对比度调整。

其中:C为尺度比例常数,s为原图灰度值,t为目标图灰度值,s和t的取值范围都为0到L-1。
对于执行水下管道巡检任务的AUV来说,其图像预处理的目的是为了将图像中的管道与其它背景进行区分,因此需要对其进行灰度直方图均衡化处理,将临近灰度值的部分归为一类,以区别管道图像及其背景。其基本原理是通过调整图像像素之间的映射和分布关系,使灰度的概率密度呈均匀分布,从而调整图像的整体对比度,使得图像过去亮度较暗的部分的信息得以呈现,其变换公式为:

其中:0≤sk≤1,k=0,1,…L,sk为原图像像素值。
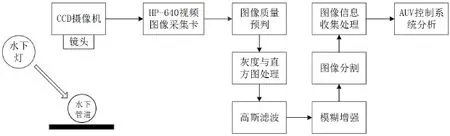
图2 本文研究思路
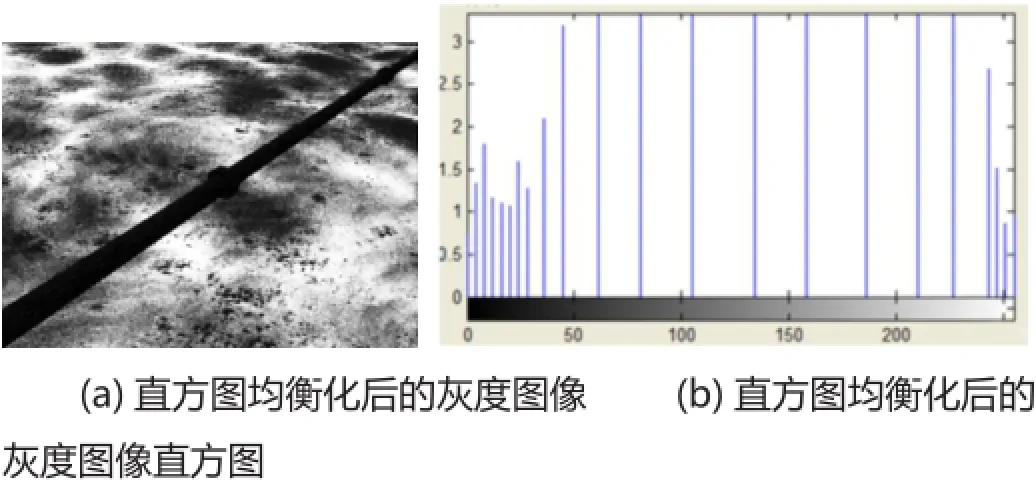
图3 直方图均衡化或规定化后的图像
从图3中可知,进行直方图均衡化后,图像整体的对比度获得了改善,图像阴暗分明,并能看到更多的细节。
1.2 高斯滤波处理
由于图像受到海水中的各种悬浮微粒散射的影响,极大的影响了成像质量,增大了图像处理的难度。
高斯滤波是一种有效的低通滤波方法器,它常用来对图像进行平滑的滤波处理,其对图像服从随机或高斯分布的噪点具有很好的效果。高斯滤波器函数的二维形式如下:

其中,x和y表示的是像素点间的距离,σ为分布函数,高速滤波曲线的形状可以通过改变分布函数σ来实现。
此外,由于采用CCD镜头成像时镜头中的噪点多服从正态分布,因此采用高斯滤波对图像进行滤波处理的效果较好。
为了验证高斯滤波器的处理效果,本文特意选取了一张受噪声污染较为严重的灰度图像原片,然后采用高斯滤波的方法对图像进行处理,结果如下图:
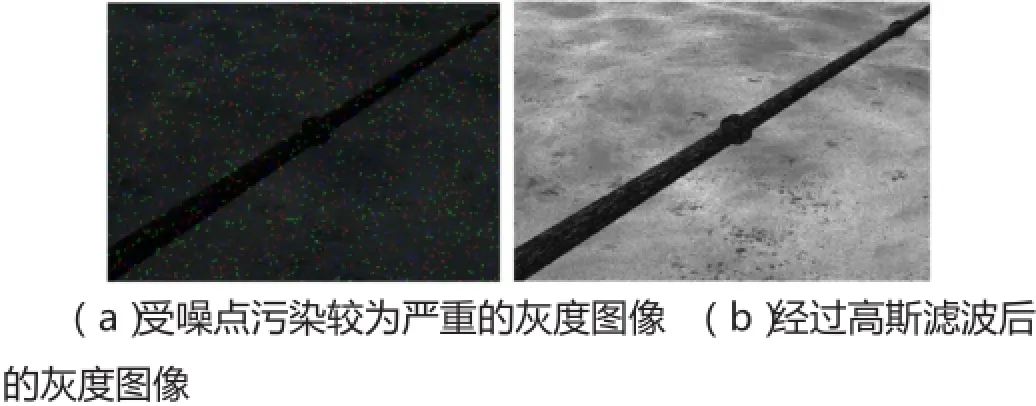
图4 采用高斯滤波对图像进行处理
1.3 模糊增强
高斯滤波器虽然可以有效降噪,但同时也会降低数字图像的清晰度。为了恢复和提高经高斯滤波后的图像清晰度,使得管道区域可以有效地和黑色背景区域区别开,本文采用模糊增强算法对图像进行边缘处增强。本文定义模糊算子为:

式中:r为灰度模糊变换的次数,通过试验发现,当取r=3时图像的增强效果最好;其中kmn为图像像素的隶属度。
1.4 图像分割
对AUV所拍摄的水下图像进行处理的一个主要目的就是为了将人们感兴趣的管道图像从整个海底背景图像中提取出来,它是从图像处理进入到图像量化分析的重要步骤,它使得对图像的数字化提取和解读理解成为可能。
本文采用阈值化技术来实现图像分割,它通过选取合适的灰度阈值,然后以阈值作为区分标准,将像素灰度值大于阈值的作为一类,其它的划分为另一类,从而实现对图像的分割。整个技术的关键就是选择合适的阈值,阈值一般可写成如下形式:

其中f(x,y)是在像素点(x,y)处的灰度值,p(x,y)是该点的灰度梯度函数。采用上式即可求出阈值化后的图像如下。

图5 阈值化后的图像
1.5 图像数据信息采集处理
在获得阈值化的图像后,需要将图像转换为计算机能够识别的数字信号特征。为了更好的对数字图像特征进行描述,本文选择阈值图像中深色图像的长径比、伸长度、圆形度3个特征参数来对其进行描述;通过研究这3类特征参数在不同图像中的不同值,来确定水下样片中的核心图像为管道还是岩石、沟壑等物。
其中长径比为图像的长轴长度与短轴长度之比;伸长度和圆形度以公式(6)和(7)计算:

其中 A是目标区域的面积,a、b分别是所有包围目标区域最小矩形的宽度和长度,通过这一参数能够将近似圆形的目标和细长形目标分开。

其中,S为缺陷区域的面积,L为周长。圆形度C描述了目标形状与圆的接近程度,C值越大表示其形状越接近于圆,C=1时为圆形。
本文通过水下摄影机获得的数十张背景样片进行阈值化后的数字提取,得出部分图片中物体类型与特征参数的关系如表1所示。
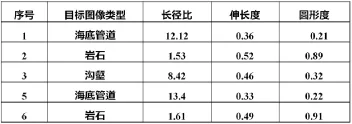
表1 图像的特征参数
将提取后的图像特征参数值提交给AUV的图像运算处理中枢,可以对CCD成像图片中所蕴含的信息进行解读,并将相关数据提交给AUV处理。
2 结束语
本文主要研究了采用计算机数字图像技术对AUV所拍摄的水下图片进行处理,以获得能供AUV解读的特征信息的技术。在图像处理过程中,本文首先采用了灰度变换和直方图增强技术以对原始图像进行增强,然后采用高斯滤波去除噪点,再用模糊增强恢复图像强度,接着采用阈值化技术对图像进行了分割和提取,最后选取了长径比、伸长度、圆形度3个特征参数对图像进行描述,以确定图像所包含的实际信息,并将相关处理数据传输给AUV的其它控制模块,以供器进行管道跟踪或航迹规划所用。
[1] 林楠. AUV管道巡检的相关研究与工程应用[J].机器人,2013,35(4):56-59
[2] 王彬.水下图像增强算法的研究[D].中国海洋大学硕士学位论文,2008
[3] 唐旭东,朱炜,庞永杰,等.水下机器人光视觉目标识别系统[J].机器人,2009,31(2):171-178
[4] 周飞.计算机视觉检测方法研究综述[J].光学技术,2014,12(4):315-321
The application of computer digital image technology in detection of AUV underwater pipeline
Gao Benguo
(Kunming ship equipment research center Kunming Yunnan,650061)
This paper mainly studies the role of computer digital image processing in the process of underwater pipeline image processing by AUV.Mainly for the poor quality of the underwater image of the gray transform, histogram processing to enhance its contrast,making the image more clear,Then, the digital image is extracted by using Gauss filtering and image segmentation technology, and the characteristic parameters of the images are acquired.From the effect of image processing,the image can be transformed into the image of the machine vision system,This provides a technical basis for the further understanding of the image information,which provides the basis for the AUV's autonomous optical pipeline tracking and route planning.
computer digital image technology;AUV;underwater pipeline detection
高本国(1986-),男,云南昆明人,硕士,助理工程师,主要从事机械结构设计方面的工作。
