链式静止同步补偿器控制系统的研究与设计
2015-12-14魏丽君谢永超
魏丽君,谢永超
(1.中南大学地球科学与信息物理学院,湖南 长沙 410083;2.湖南铁道职业技术学院,湖南 株洲 412001)
链式静止同步补偿器控制系统的研究与设计
魏丽君1,2,谢永超2
(1.中南大学地球科学与信息物理学院,湖南 长沙 410083;2.湖南铁道职业技术学院,湖南 株洲 412001)
该文基于串联多电平技术,完成一套链式静止同步补偿器控制系统的研究与设计。根据反馈解耦控制算法和单级倍频载波相移正弦脉宽调制方法,采用串联多电平技术,以TMS320F28335为核心处理器,采用软件算法实现补偿器直流侧电压均衡控制。设计链式结构的三相电压源逆变器,构成链式静止同步补偿器系统,实现系统无功补偿控制。经过试验测试,结果表明:该系统的无功补偿效果与理论一致,设计可行、可靠。
无功补偿;反馈解耦控制算法;串联多电平;链式静止同步补偿器
0 引 言
随着电力行业的日益发展和相关新型装置的广泛运用,电能质量问题日益凸显。谐波的存在造成了无功功率的增加,给电网造成了污染,同时也增加了设备的容量。因此,开发新的智能装置,对电力系统进行无功补偿显得越发重要。目前主要采用静止无功补偿器(SVC)和静止同步补偿器(STATCOM)进行无功功率的补偿[1-3]。SVC目前在同容量成本上较STATCOM低,但在动态响应速度和可控性能方面,STATCOM远优于SVC。STATCOM还可以设计用作滤除电力系统谐波的有源滤波器[4-5]。
本文根据反馈解耦控制算法和单级倍频载波相移正弦脉宽调制方法,采用串联多电平技术,以TMS320F28335为核心处理器,用软件算法实现补偿器直流侧电压均衡控制,设计了链式结构的三相电压源逆变器,构成了链式静止同步补偿器系统,实现对电网的无功补偿。相比传统的无功补偿设备,本文设计的系统具有调节速度、运行范围宽的优点,而且在采取多重化、多电平或PWM技术等措施后可减少补偿电流中谐波的含量[6-8]。
1 系统设计方案
本设计的主要目的是实现电网的无功补偿,采用串联多电平技术,系统分为主电路和控制电路两部分。系统总体电路结构图如图1所示。
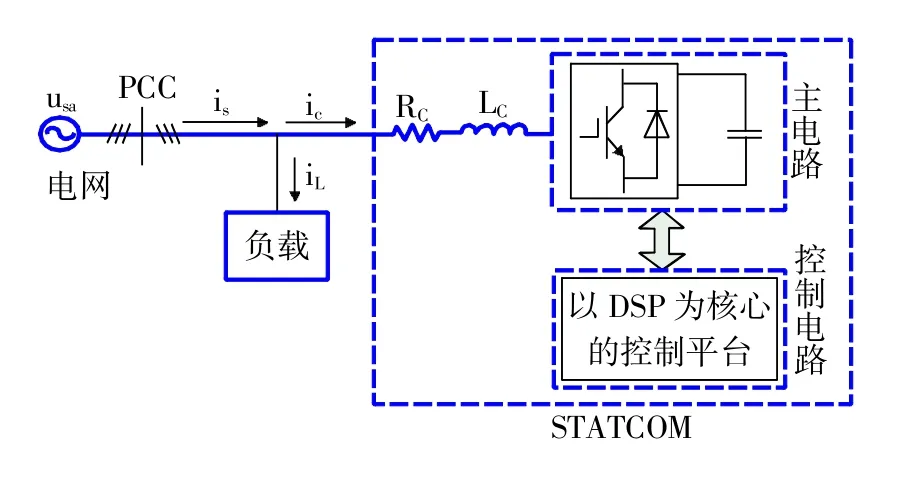
图1 系统整体硬件框图
2 系统硬件设计
2.1系统硬件结构框图
系统由主电路和控制电路两部分组成,硬件结构框图如图2所示。主电路拓扑为串联5电平逆变器;控制电路主要包括DSP控制器、24路PWM波形发生器等。其中DSP主要完成相关控制算法、负载电流的检测、补偿电流的采样等。而24路PWM波形发生器采用FPGA实现[9]。
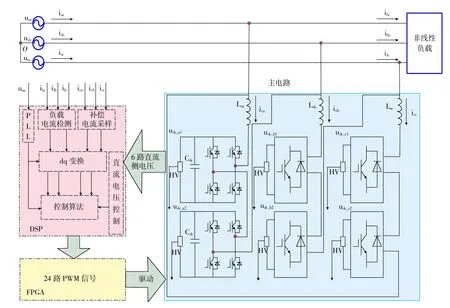
图2 系统硬件结构框图
2.2控制电路硬件设计
2.2.1控制电路总体结构
控制电路是整个系统的重要组成部分,采用FPGA+DSP的全数字控制平台方案,其结构如图3所示。其中,FPGA主要实现PWM信号的产生,而直流侧电压控制、基波电网电压锁相、统过压、过流保护、指令电流运算系等功能则由DSP负责实现。为了确保采样的精度,采用3片AD7656对三相电网电压usa、usb、usc,三相电网电流isa、isb、isc,STATCOM输出电流 ica、icb、icc以及负载电流 ila、ilb、ilc,各 2H桥直流侧电容电压udck(k=1,2,…,6)共18路信号进行转换。
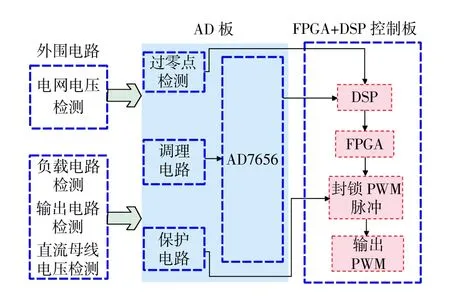
图3 控制电路硬件结构框图
2.2.2信号调理电路
信号调理电路分为两级,如图4所示。第1级主要去除信号中的高频干扰,设计采用抗混叠低通滤波器;第2级主要完成信号放大,将经过滤波处理后的信号幅值调整到合适范围后由A/D转换器完成模数转换[10]。
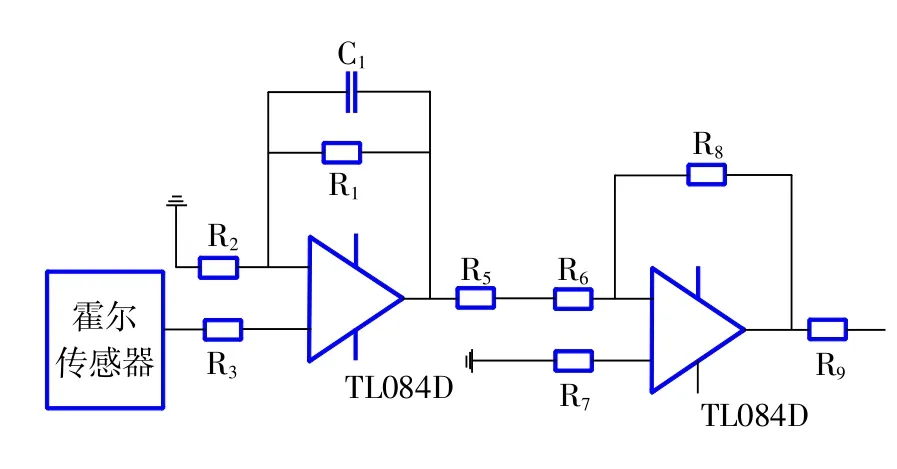
图4 信号调理电路
根据采样信号的频率(50 Hz),设计截止频率为100Hz的一阶低通滤波器,并同相输入;其中,C1=0.1 μF,R1=10 kΩ,R2=10 kΩ,R3=510 Ω,R5=6.2 kΩ,R6=6.6kΩ,R8=20kΩ。
2.2.3过零点检测电路
在硬件设计过程中,为了实现控制算法,需要对变换过程中的信号进行同步,而准确锁相要求电路能够准确检测出正弦电网电压信号的过零点,为后面采用软件方法实现锁相提供条件,过零点检测电路如图5所示。
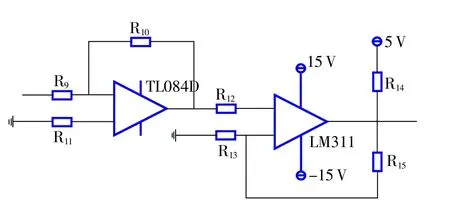
图5 过零点检测电路
为了保证同相以及实现信号的隔离,设计加入一个反相跟随电路。由于电网电压存在一定的干扰,故设计采用迟滞比较电路,滞后量由R13和R15决定,取滞后量为1mV,根据上图,可得滞后量的表达式为

式中:VOH——输出端高电频,mV;
VOL——输出端低电频,mV。
选取R15为1MΩ,R13为10kΩ。由LM311的特性可得:电路中输入的正弦波信号高于零电压时,输出为高电平;低于零电压时,则输出低电平。因此通过该电路,正弦信号将变为方波信号,其幅值为5V。其上升沿对应正弦波的过零点。因此,DSP捕捉过零点检测电路输出信号的上升沿,即可得到原正弦信号的过零点。
2.2.4保护电路
过压过流保护电路如图6所示。
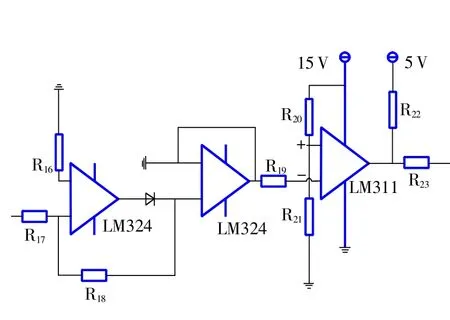
图6 保护电路
保护电路的输入端接信号调理电路的输出,电路分为3级。第1级为LM324与二极管组成的取绝对值电路,将正负电压转化为正电压以便进行比较。第2级跟随器电路由LM324构成,其输出接入由LM311组成的第3级比较电路。正常情况下,调理电路的输出信号幅值为0~8V,所以非故障情况下,输入LM311的信号幅值最大为8V。因此,设置保护电路的电压阈值为9V。
3 系统软件设计及指令电流计算的软件实现
3.1系统软件设计
系统的软件设计包括3个环节:
1)按照反馈解耦的控制算法对采样信号进行处理,得到无功补偿的指令电压信号。
2)根据指令电压信号生成驱动开关管的PWM信号。
3)实现功率单元和控制单元通信。
3.2指令电流计算的软件实现
无功补偿的指令电压信号是通过反馈解耦控制算法计算得出的,程序主要分为主程序和定时器中断程序两部分。
1)主程序流程图
主程序流程如图7所示。主程序中,DSP主要完成H桥模块开关管的开关信号转换为不同频率的方波。
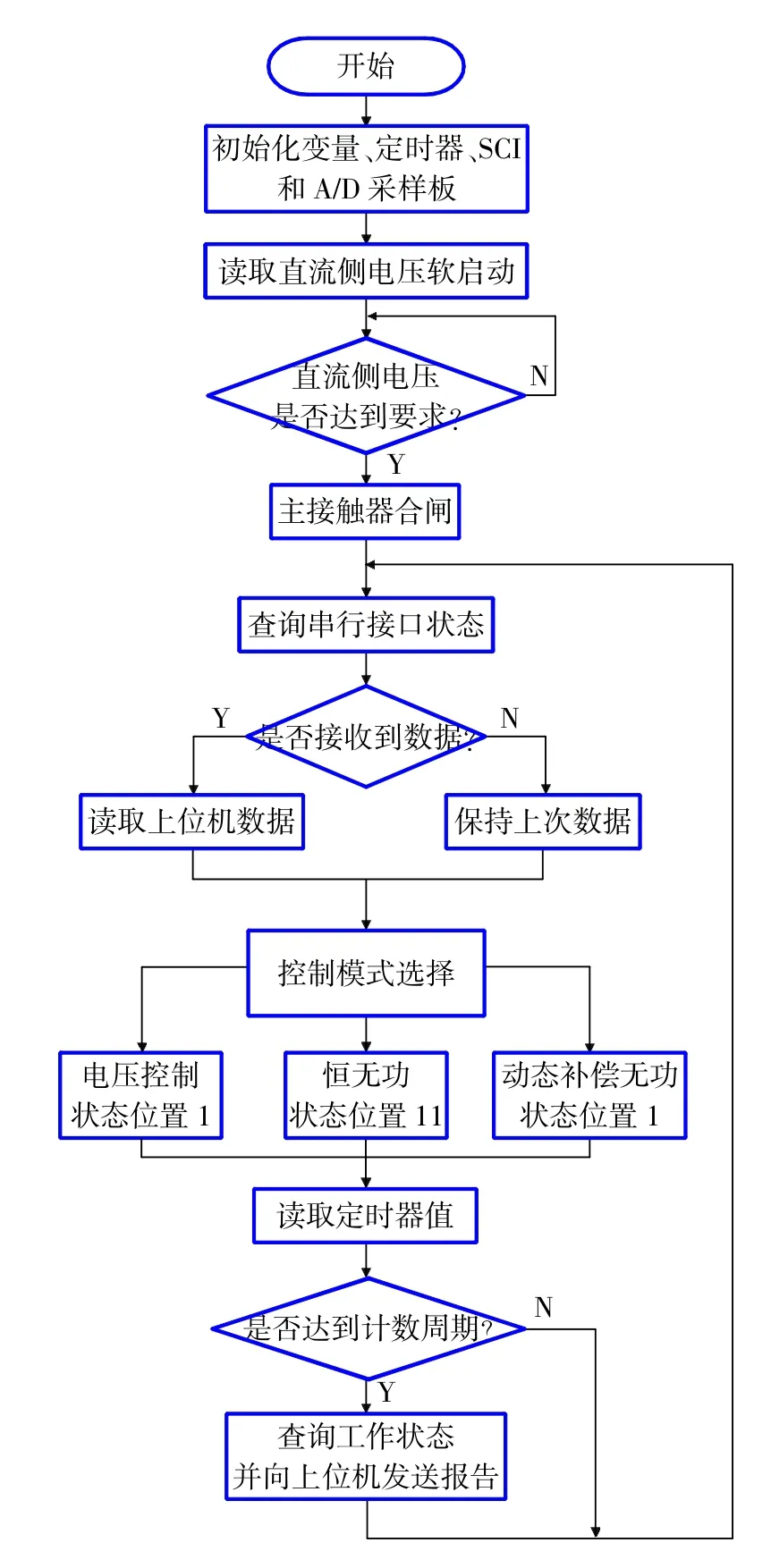
图7 主程序流程图
2)捕获中断子程序流程图
捕获中断子程序流程如图8所示,此中断由过零点检测电路输出方波的上升沿触发。
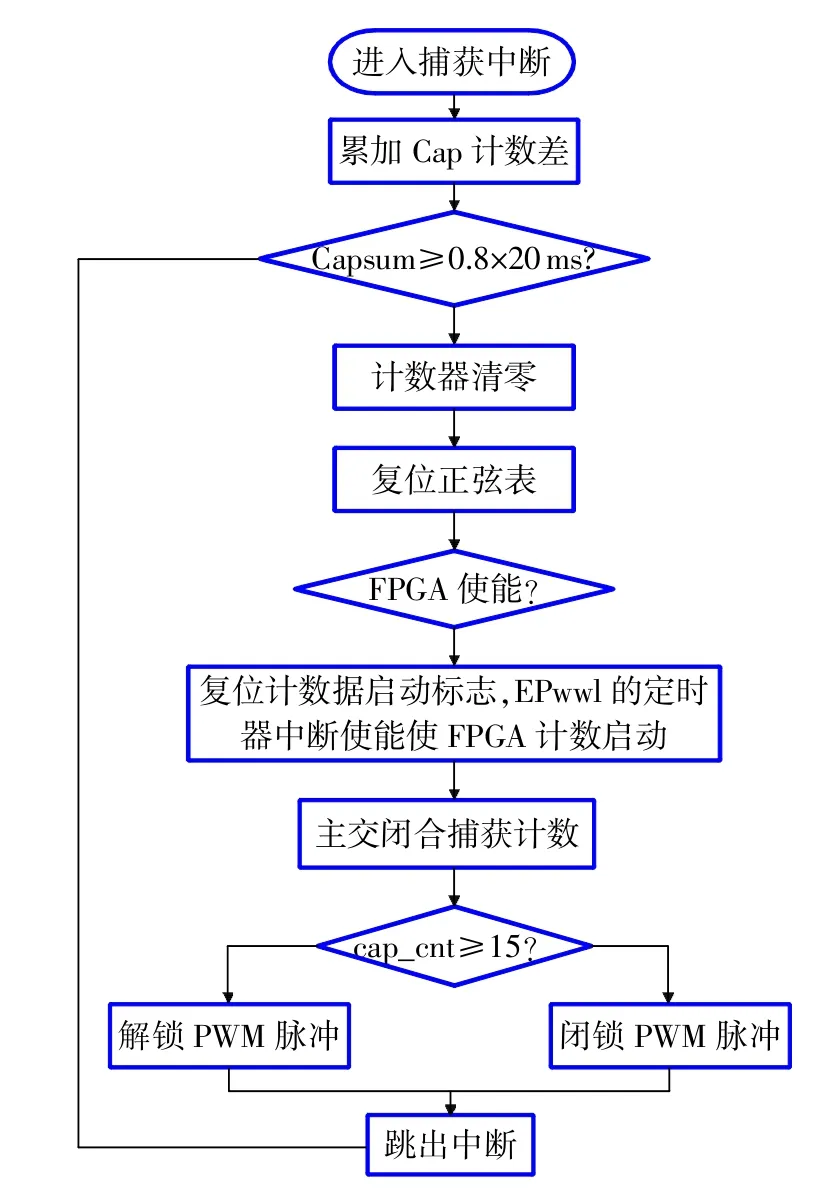
图8 捕获定时器中断程序流程图
3)EPWM1定时器中断程序流程图
EPWM1定时器中断程序流程如图9所示,其主要任务就是在确定工作状态无故障的情况下,计算得出指令电压信号,对其进行调整,得到PWM的调制波信号。
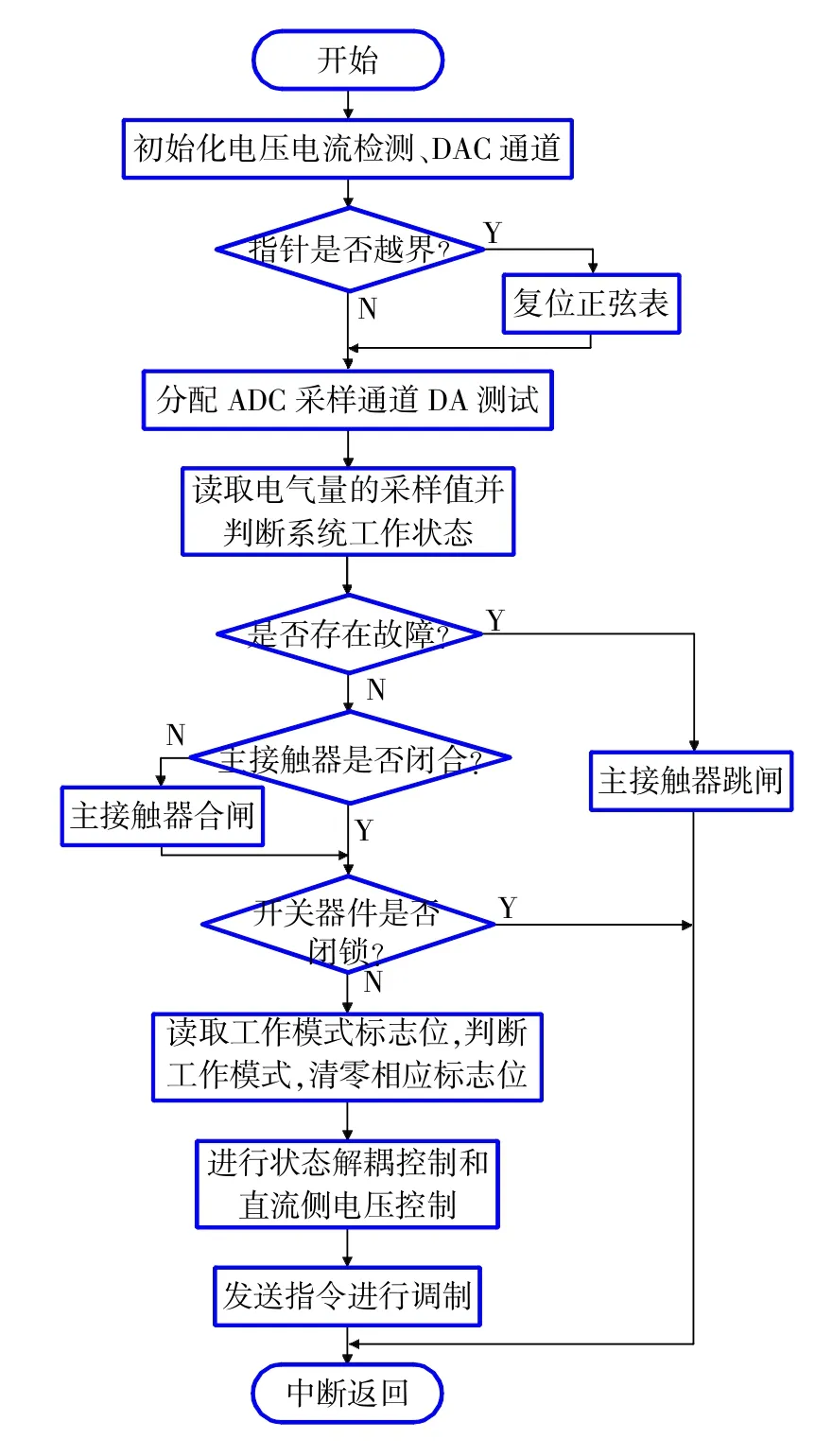
图9 EPWM1定时器中断程序流程图
4)状态解耦控制及直流侧电压控制程序流程图
状态解耦控制算法及直流侧电压控制算法的软件实现流程如图10所示,首先,进行所需要的各电气量的采样,当捕获计数值达到要求后,计算dq变换所需要的数学量值及直流电压控制所需要的电流、电压量值,然后对三相补偿电流和电网电压进行dq变换,同时进行指令电流运算和PI调节,输出量经dq反变换即可得到指令电压信号。
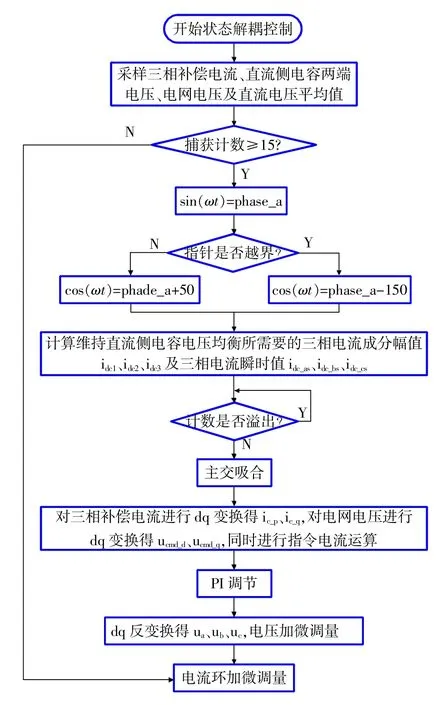
图10 状态解耦控制程序流程图
4 试验测试及结果
本设计的装置主要是补偿电网无功功率,主要测试:
1)测试各模块直流侧电压的稳定和均衡性。
2)测试STATCOM输出端电压波形,验证单级倍频CPS-SPWM调制方法的正确性。
3)测试STATCOM输出电压电流波形,检验系统的无功补偿效果。
4)测试系统过压过流等故障情况下的保护功能。
4.1直流侧电压启动过程及控制效果
首先,测试直流侧电压的启动过程,共分为两个步骤:1)在A、B、C三相H桥模块各串联一个57Ω的限流电阻,使变流器的开关管IGBT处于闭锁状态,利用与IGBT开关管的反并联二极管实现不可控整流,从电网吸收有功功率,对H桥直流侧电容充电,结束后,直流侧电压进入稳态,即H桥模块直流侧电容电压之和等于电网线电压峰值;2)时间继电器动作将限流电阻短接,然后解锁整个变流器的开关管驱动脉冲,利用PWM高频整流继续从电网吸收有功功率,将直流侧电容电压升高到给定值并稳定在其附近。
实验时,利用三相可编程电源模拟三相电网,若给定电网电压为40 V,第1阶段为开关管反并联二极管不控整流阶段,稳定后H桥模块直流侧电压为24.5V,当H桥模块直流侧电压值趋于稳定以后控制继电器动作把限流电阻短接,进入第2阶段,即PWM高频整流,实验波形如图11所示。
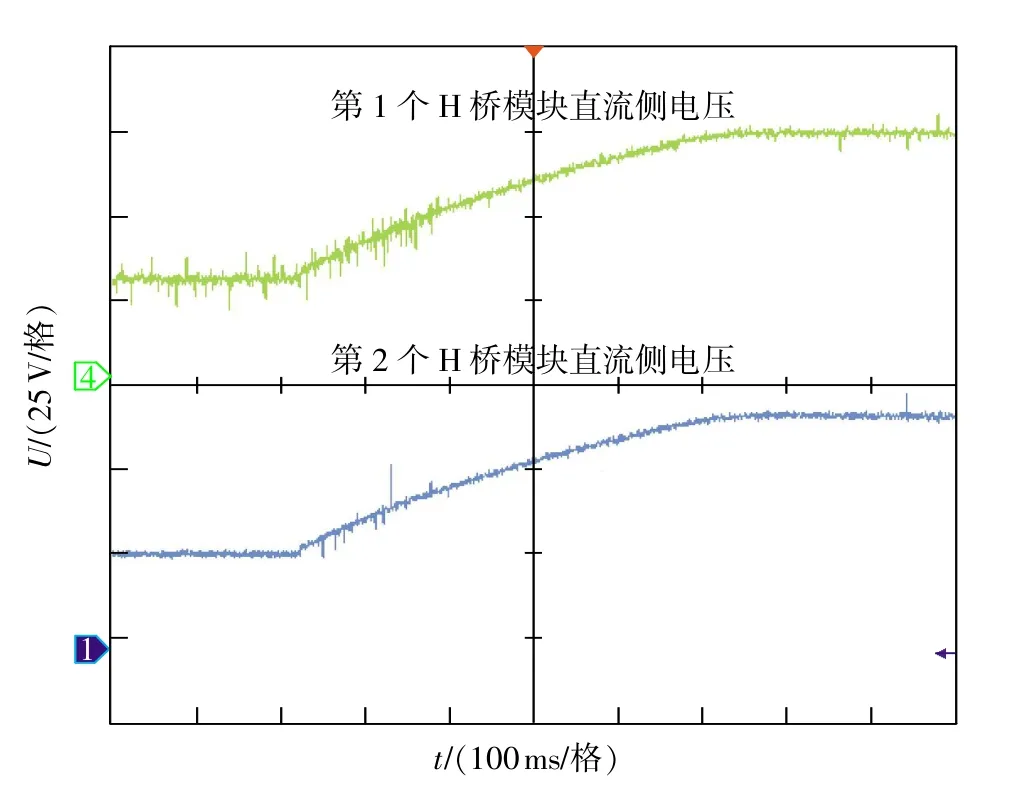
图11 直流侧电压启动过程波形
图12给出了PWM高频整流阶段H桥模块直流侧电压的实验波形,两个H桥模块的直流侧电压恒定上升到给定值75V附近。这是因为,当H桥单相电路模块电压值接近给定值时,PI调节器开始起作用,使得调节后的电压值不至于升得过高,而是稳定在给定值75V附近。
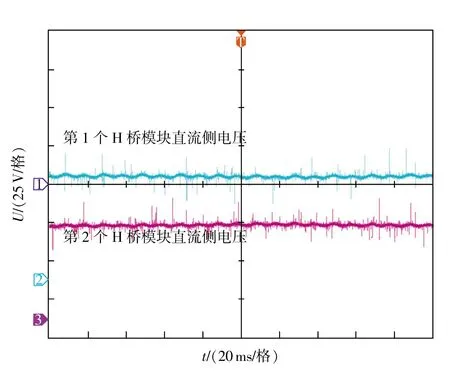
图12 稳定后A相两个H桥模块直流侧电压
4.2单级倍频CPS-SPWM技术
直流侧电压稳定后,即可启动系统进行无功补偿。系统主电路为基于串联多电平的电压源逆变器,驱动信号的生成采用单级倍频CPS-SPWM技术,按照图2~图10所示算法,单相逆变器的输出端相电压应为5电平类似正弦信号的阶梯状波形。由于主电路采用Δ型连接,测试Ca,Cb,Cc任意两点间电压波形,得到的是三相线电压,根据相电压波形,可知线电压应为9电平阶梯状类似正弦信号的波形,即为补偿器输出滤波前的电压波形。用示波器测量Ca、Cb两点间电压,得到的结果如图13所示。
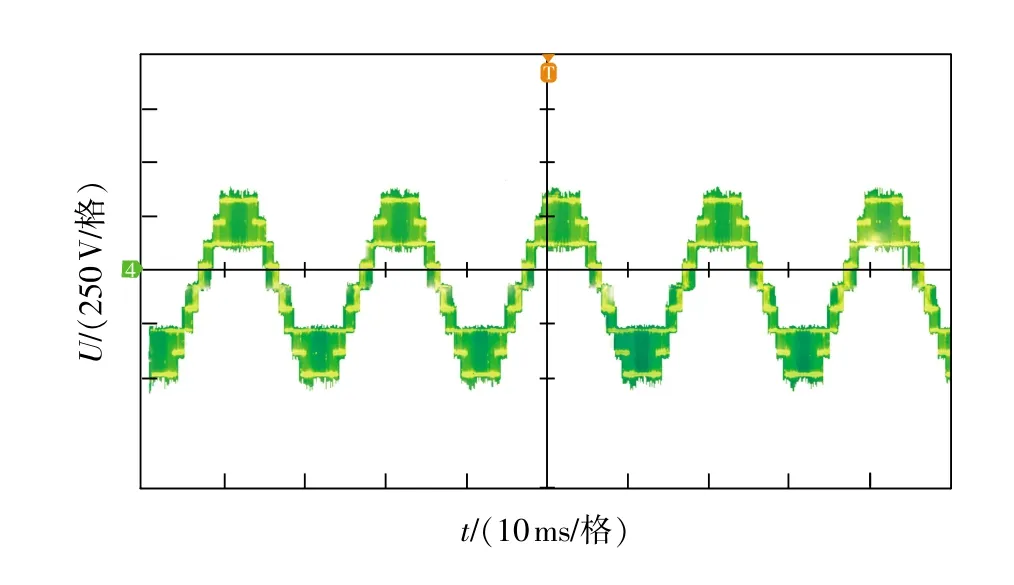
图13 补偿器输出端滤波前电压波形
图中给出了补偿器输出滤波前电压的实验波形,电压共9电平,频率50Hz,与单级倍频CPS-SPWM技术理论分析结果一致,证明了这种PWM信号调制方法的正确性。
4.3无功补偿效果测试
将负载与电网断开,此时补偿装置和电网直接相连,补偿器输出端电流超前电压90°,电压幅值高于电网电压,测量补偿器输出端滤波后电流及采样电压,得到的结果如图14所示。其中,电流为补偿器输出端电流,电压为DA输出的补偿器输出端电压的采样值。由图可知,补偿器输出端电流相位超前电压相位约90°,补偿器工作在容性工况,与理论结果一致。
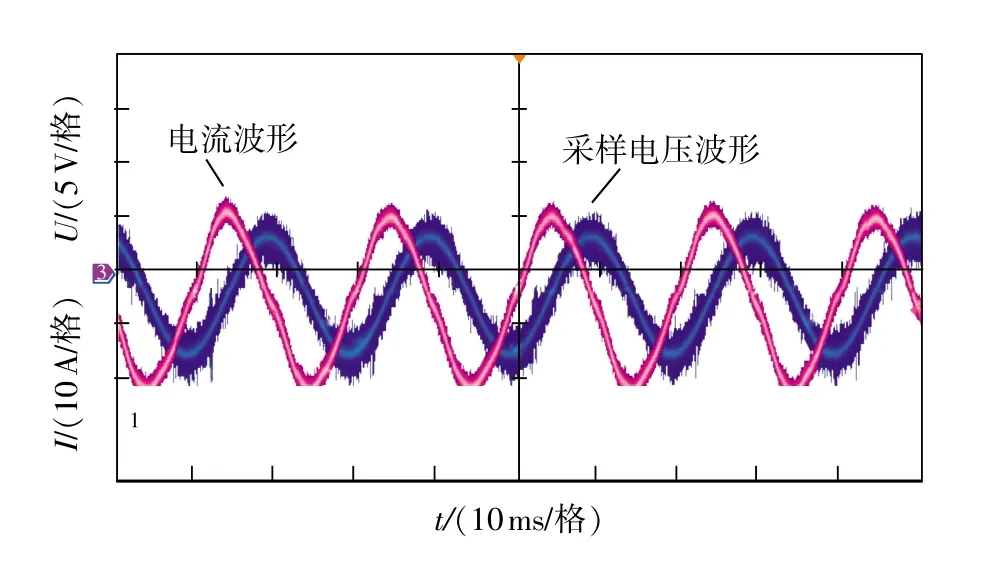
图14 补偿器输出端滤波后电流及采样电压波形
4.4过流保护测试
当装置在正常运行或启动时,当装置电流输出大于额定电流20A的10%,即22A时,系统进入过流保护,闭锁PWM脉冲,故障指示灯亮。当电流恢复到正常范围,系统恢复正常运行。
5 结束语
根据测试实验,可得以下实验结论:
1)直流侧电压启动过程及控制效果测试结果表明,文中设计采用的控制方法能够实现直流侧电压的稳定和均衡控制。
2)单采用级倍频CPS-SPWM技术能够得到多电平输出电压。
3)无功补偿效果测试结果与理论一致。
4)过压过流保护测试结果符合设计要求。
[1]王静.基于磁控开关电抗器的无功补偿新方法[D].武汉:华中科技大学,2012.
[2]刘鹏升.基于磁阀式可控电抗器的配电网无功补偿系统研究[D].长沙:中南大学,2013.
[3]金治乾.DSP智能无功补偿及谐波抑制的研究[D].武汉:武汉理工大学,2008.
[4]汤涌,侯俊贤,刘文焯.电力系统数字仿真负荷模型中配电网络及无功补偿与感应电动机的模拟[J].中国电机工程学报,2005,25(3):8-11.
[5]王凌谊,侯世英,吕厚余,等.电力系统无功优化与无功补偿[J].电气应用,2006,25(10):45-48.
[6]Freitas W,Morelato A,Xu Wilsun,et al.Impacts of AC generators and DSTATCOM devices on the dynamic performance of distribution system[J].IEEE Trans.on Power Delivery,2005,20(2):1493-1501.
[7]于东民.浅谈SVC无功补偿和谐波抑制[J].中国高新技术企业,2011:10-11.
[8]陈绪轩,田翠华,陈柏超,等.多级饱和磁阀式可控电抗器谐波分析数学模型[J].电工技术学报,2011(3):57-64.
[9]Rao P,Crow M L,Yang Z P.STATCOM control for power system voltage control applications[J].IEEE Trans on Power Delivery,2000,15(4):1311-1317.
[10]黄晓胜,史欢,田翠华,等.基于磁控电抗器的变电站无功电压控制[J].电力自动化设备,2011(8):99-102.
Research and design of control system for cascade static synchronous compensators
WEI Lijun1,2,XIE Yongchao2
(1.School of Geosciences and Info-Physics,Central South University,Changsha 410083,China;2.Hu’nan Railway Professional Technology College,Zhuzhou 412001,China)
A control system for cascade static synchronous compensators has been developed on the basis of cascaded multilevel technology.In combination with feedback decoupling control algorithm and sinusoidal pulse width modulation for single-level frequency doubling carrier phase shifting,using cascaded multilevel technology,TMS320F28335 as core processor and software algorithm were employed to realize compensator DC-side voltage balancing control.A chain-linked three-phase voltagesourceinverterwasdesignedaccordinglytoconstituteacascadestaticsynchronous compensator system,thus achieving the goal of reactive power compensation control.Tests prove that the system is feasible and reliable.
reactive power compensation;feedback decoupling control algorithm;cascaded multilevel;cascade static synchronous compensator
A
1674-5124(2015)12-0100-06
10.11857/j.issn.1674-5124.2015.12.025
2015-01-20;
2015-03-06
魏丽君(1983-),男,湖南娄底市人,讲师,硕士,研究方向为智能仪器与仪表、电子技术。
