无姿态传感器下RTK三维水深测量方法
2015-12-08杜国元黄金发沈理
杜国元++黄金发++沈理
摘 要:采用RTK三维水深测量的方法进行精密单波束水深测量是目前研究的热点,但其具体实施方法尚无成文的规定。本文在分析水深测量误差的基础上探讨了无姿态传感器条件下的进行精密单波束水深测量的方法,并以实例进行了验证。
关键词:RTK 三维 水深测量 精密 单波束 误差
水深测量是测绘活动中一项常见而重要的内容,在海图测绘、江河湖泊及水库调查、涉水项目工程设计、涉水建筑物安全维护、航道监测、水道冲淤研究等方面均需要进行不同比例尺的水下地形图的测绘。
水深测量的目的是获取水底不同位置相对于某一稳定的高程(深度)基准面的高程(水深),测深和定位是水深测量两项最主要的内容。由于在绝大部分情况下水深测量都是动态条件下的测量,测量载体的姿态和水深基准面的确定在大多数情况下已成为影响着水深测量精度的主要因素。因此确定水深测量时测量载体的姿态变化和测量瞬间的测量基准面的位置成为提高水深测量的关键。
最新的《水运工程测量规范》(JTS131-2012)已规定可以采用“RTK三维水深测量”方法进行精密水深测量,并规定了指导性的作业方式和数据处理方法。其定义为:“RTK三维水深测量是利用GPS RTK 提供的瞬时高精度三维解,通过时延改正、姿态改正,最终为回声测深系统换能器提供准确的三维基准,进而根据回声测深结果,得到水底点的三维坐标。”但对何种条件下必须采用姿态传感器,规范里并无明确的规定。
为此需要分析不同条件下的水深测量误差,确定需要采用姿态传感器设备的条件。
水深测量误差分析
正如前面分析所言,水深测量的误差来源众多,包括定位的误差、测深仪自身的测距误差,测量介质引起的声速效应误差、测量载体姿态引起的测量误差等。其中定位误差目前已可忽略,测深仪自身的测距误差也远小于其它因素的影响。这里可以认为对测量深度的主要因素包括传播介质、测量载体等相关效应,有声速、姿态和船只静、动吃水的影响。具体分析如下。
1、声速效应对测深的影响
声速效应的影响直接影响到回声测深仪测量的深度部分,根据回声测深原理,深度等于介质中声波传输速度与传播时间一半的乘积,而声波在水体中的传播速度并非是一个固定值,它和测时环境相关,同水体的温度、盐度、密度以及声波频率相关,可以根据测区水域的温度和盐度进行改正,通常公式计算某温度、盐度下的声速。
由于水体中(特别是海区)的水温和盐度在垂直方向上存在梯度分布,引起声速在垂直方向上存在梯度分布,而且位置不同,声速梯度分布也不尽相同。在测量的时候,不同的测点需采用该测点测量时声速传播路径上的平均声速(可采用声速剖面仪测定),采用后处理的方法进行声速改正,
理论上:平均声速Cm应为声波传播全路径上的瞬时声速平均值,若采用水深参数h表达应为:
■(1),(1)中:D为从换能器到水底的深度。
由于不可能知道声速传播路径上每一处的声速,故在实际计算中采用式(2)进行抽样离散的计算:
■(2),式(2)中,n为声波路径上的抽样数,也就是分层数;di为各水层的厚度,Ci为各水层的声速值,n值越大,即抽样数越多,结果越准确。
上式(2)可称为计算平均声速的精确公式。
实际上在水深测量的时候,我们都将一个固定的设计声速C0(一般取1500m/s或者某一位置的表层声速)输入测深仪,此时测得的每一个位置的水深实际上是一个近似水深,需要在后处理时进行声速改正。声速改正值dh=h(Cm-C0)/ C0 。 (3)
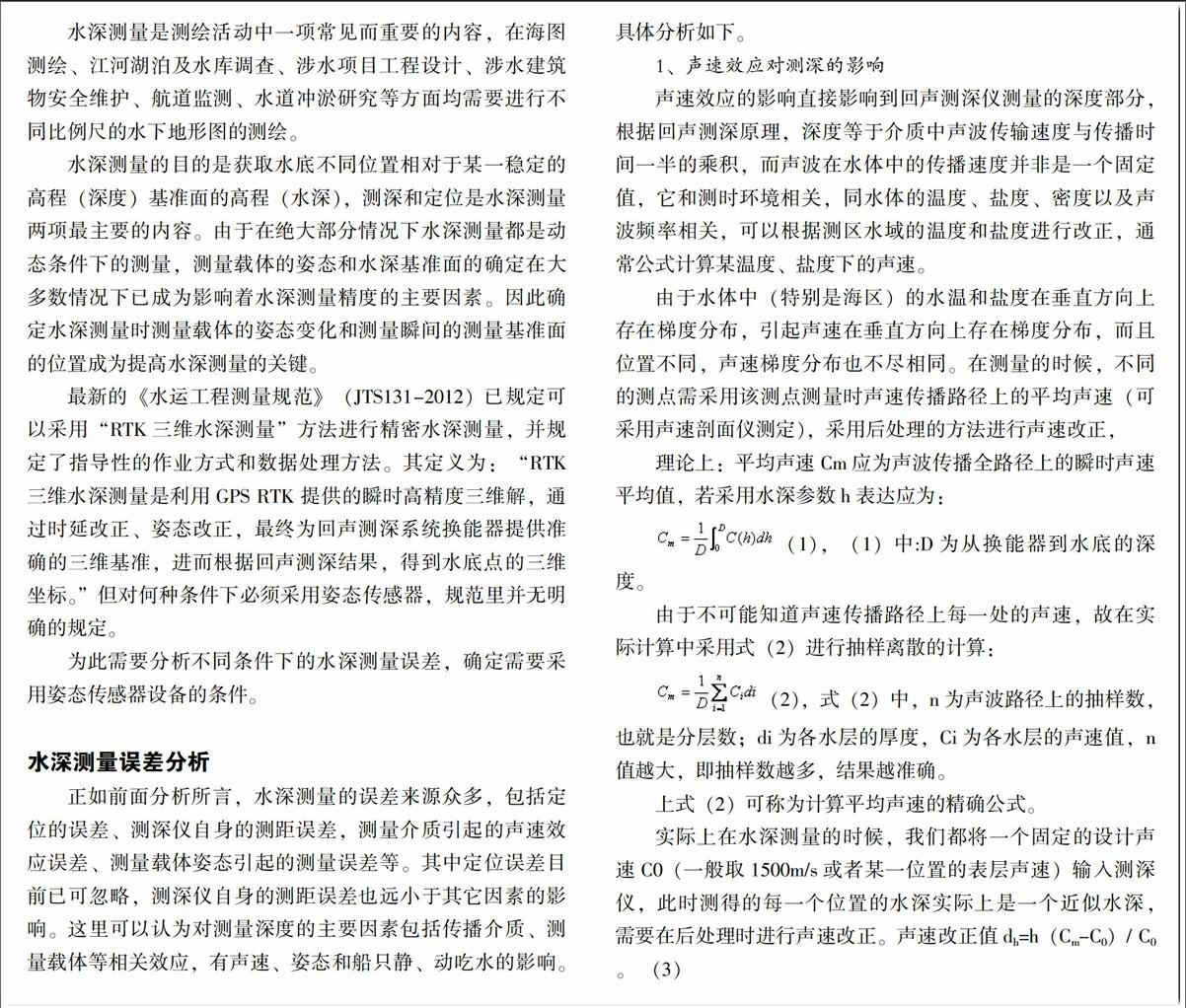
从上式(3)可知,测深值的声速改正值与观测深度成正比,水深越大,声速改正值越大,还与声速差成正比。改正值数值的大小见下表1所示:
表1 声速改正值数值表
2、测船姿态变化产生的测深误差
姿态影响是指载体受到风、浪、流的作用而导致的测量不准,无论是横摇、纵摇、艏摇和倾斜,其作用机理都是导致测深仪中心波束倾斜而产生复杂的误差变化,它是一个即影响平面定位又影响深度测量的复杂过程。
2.1 测船横摇产生的测深误差
理论上,波浪对测深的影响是通过对船姿态的改变来产生作用的,因此,波浪对测深的影响可分为测船纵摇,横摇、升沉等对测深的影响几个方面。
设α为测船横摇角,左舷下倾时取正值,θ为换能器半波束角,s为记录深度,d为真实深度。很明显,如果│α│≤θ,α角造成的测深信号的偏移仍在波束角范围之内,所测得的深度可以认为是没有附加误差的,则发射的测深信号偏离了垂直方向而产生了附加误差。
一般情况下,测深线是沿水底地形变化梯度方向布设的,所以沿测深线垂直方向(即测船的横摇方向)可以认为是平面,此时产生的附加深度误差Δdroll可以估计为:
Δdroll = H'-H =s[cos(α-θ)-1] (4)
从上式(4)可以看出,由横摇α产生的附加深度误差Δdroll与测量水深值H成正比。
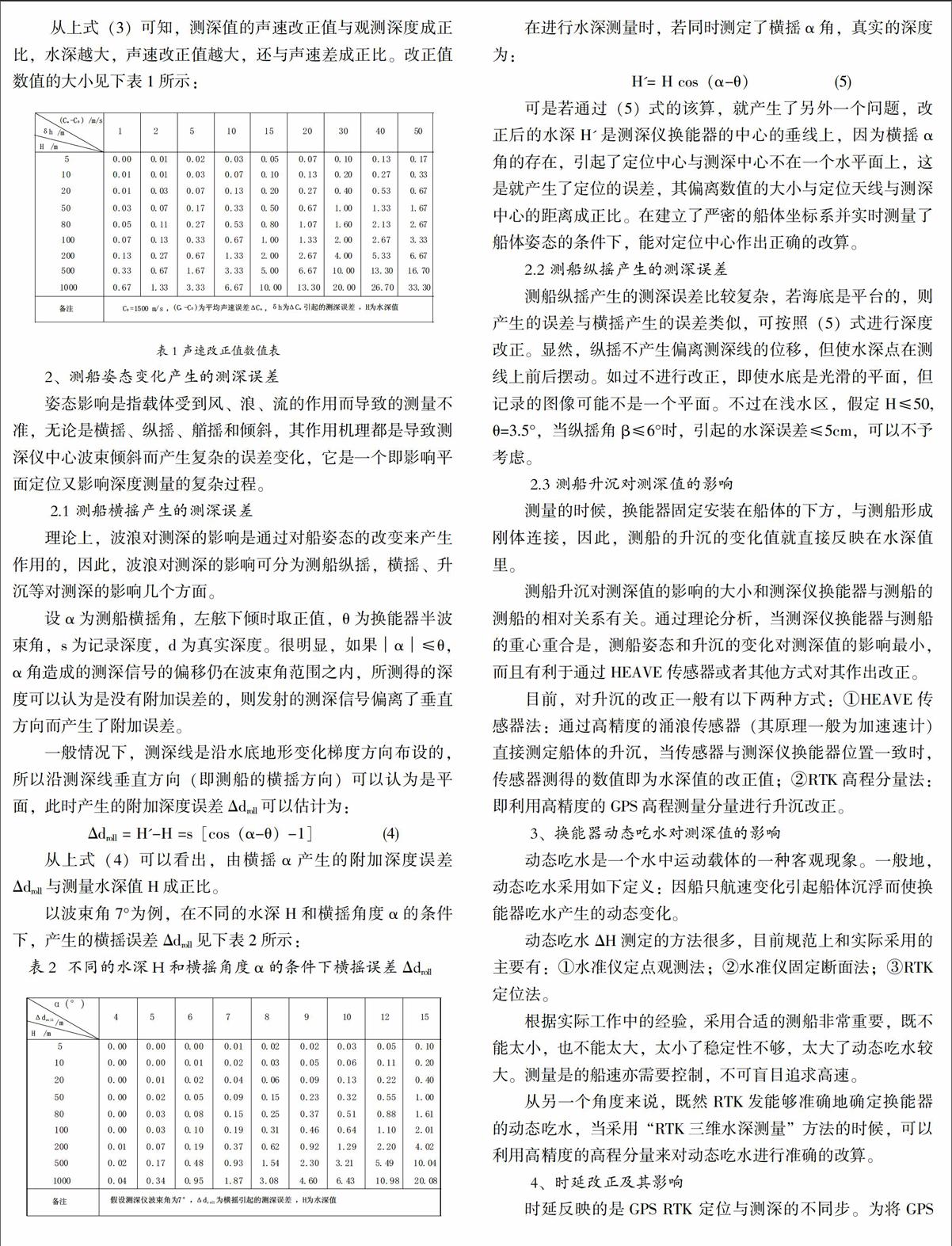
以波束角7°为例,在不同的水深H和横摇角度α的条件下,产生的横摇误差Δdroll见下表2所示:
表2 不同的水深H和横摇角度α的条件下横摇误差Δdroll
在进行水深测量时,若同时测定了横摇α角,真实的深度为:
H'= H cos(α-θ) (5)
可是若通过(5)式的该算,就产生了另外一个问题,改正后的水深H'是测深仪换能器的中心的垂线上,因为横摇α角的存在,引起了定位中心与测深中心不在一个水平面上,这是就产生了定位的误差,其偏离数值的大小与定位天线与测深中心的距离成正比。在建立了严密的船体坐标系并实时测量了船体姿态的条件下,能对定位中心作出正确的改算。
2.2 测船纵摇产生的测深误差endprint
测船纵摇产生的测深误差比较复杂,若海底是平台的,则产生的误差与横摇产生的误差类似,可按照(5)式进行深度改正。显然,纵摇不产生偏离测深线的位移,但使水深点在测线上前后摆动。如过不进行改正,即使水底是光滑的平面,但记录的图像可能不是一个平面。不过在浅水区,假定H≤50, θ=3.5°,当纵摇角β≤6°时,引起的水深误差≤5cm,可以不予考虑。
2.3 测船升沉对测深值的影响
测量的时候,换能器固定安装在船体的下方,与测船形成刚体连接,因此,测船的升沉的变化值就直接反映在水深值里。
测船升沉对测深值的影响的大小和测深仪换能器与测船的测船的相对关系有关。通过理论分析,当测深仪换能器与测船的重心重合是,测船姿态和升沉的变化对测深值的影响最小,而且有利于通过HEAVE传感器或者其他方式对其作出改正。
目前,对升沉的改正一般有以下两种方式:①HEAVE传感器法:通过高精度的涌浪传感器(其原理一般为加速速计)直接测定船体的升沉,当传感器与测深仪换能器位置一致时,传感器测得的数值即为水深值的改正值;②RTK高程分量法:即利用高精度的GPS高程测量分量进行升沉改正。
3、换能器动态吃水对测深值的影响
动态吃水是一个水中运动载体的一种客观现象。一般地,动态吃水采用如下定义:因船只航速变化引起船体沉浮而使换能器吃水产生的动态变化。
动态吃水ΔH测定的方法很多,目前规范上和实际采用的主要有:①水准仪定点观测法;②水准仪固定断面法;③RTK定位法。
根据实际工作中的经验,采用合适的测船非常重要,既不能太小,也不能太大,太小了稳定性不够,太大了动态吃水较大。测量是的船速亦需要控制,不可盲目追求高速。
从另一个角度来说,既然RTK发能够准确地确定换能器的动态吃水,当采用“RTK三维水深测量”方法的时候,可以利用高精度的高程分量来对动态吃水进行准确的改算。
4、时延改正及其影响
时延反映的是GPS RTK 定位与测深的不同步。为将GPS RTK 三维归位到换能器,为测深提供瞬时平面和垂直基准,并最终实现波束在水下的归位计算,就必须消除时延的影响。
若船速为8 节(约4.111 m/s),导航时延确定误差为0.2 秒,则导航时延确定误差统计结果表明:时延误差引起的最大平面位置偏差为0.8m。
通过理论研究,时延对平面定位和测深的影响最为显著,其影响与船速成正比。因此,实际作业中,一方面应根据实验精确计算时延;另一方面应尽量减小船速,保持测量载体的稳定性,将时延确定误差的影响减小到最小。
无姿态传感器条件下的RTK三维水深测量的实施
无姿态传感器的“RTK 三维水深测量”构成简单,只是在常规的水深测量系统中特别强调了厘米级的定位和高程测量。由于GPS RTK测量或者是PPK测量获得高精度的平面定位和高程数据已经是相当成熟的技术,在多年的测量实践中已得到验证和应用,太多的论文和文献对这个问题进行了阐释。
无姿态传感器的“RTK 三维水深测量”主要包括以下几个环节:①测区控制网测量;②高程转换模型的建立;③高精度声速剖面的测量;④内业资料处理;⑤精度评估。
笔者在80公里的长江入海口河段进行了验证测量,该河段属于感潮河段采用常规的验潮站进行水下地形测量需要耗费大量的人力。而采用“RTK 三维水深测量”将大大地减小工作量。
验证测量实施过程如下:在测区两岸布设一定密度的E级GPS控制网,联测控制点的水准高程,采用几何曲面模型构建了该区域的高程转换模型。实现了GPS大地高到正常高系统的无缝转换。
在进行“RTK 三维水深测量”的同时,根据规范的要求。在测区两岸布设了20个验潮站进行潮位控制,以便两者进行对比。通过两种方法对水下测点高程的计算,对计算出的差异成果按照0.1m的区间宽度进行分析统计。共统计测点测点32153个,差异区间如下表3所示。
表3 两种方法计算的测点高程差值统计表
以上实例表明,该项目中采用不需要任何姿态传感器的RTK的三维水深测量技术得到的测量结果与常规的潮位控制得到的结果没有明显的差异,其精度和可靠性都得到了很好的验证。
总结
从以上从六个引起测深误差的主要方面进行了分析,并定量地分析计算了在不同的测量条件下,这些影响因素对测深带来的误差的数值,同时通过实例进行了分析,可以得出很重要的结论:
在目前的技术条件下,定位和测深引起的误差在水深测量误差中已退居次要地位,声速改正误差和测量载体的姿态误差等因素已称为水深测量误差的主要来源。
辅以姿态传感器、罗经等外部设备的“RTK三维水深测量”,能够精确地改正各项的主要测量误差。为了简化操作,且在经济上简便易行,有必要研究无姿态传感器条件下RTK三维水深测量的实施条件。
具备一定的的测量环境,可以不需要任何姿态传感器(包括罗经和涌浪传感器)就可实现基于RTK的三维水深测量技术的单波束精密测深。
参考文献:
[1] 周丰年,赵建虎,周才扬. 多波束测深系统最优声速公式的确定[J]. 台湾海峡,第20卷第4期,2001,11.
[2] 管铮. 西北太平洋大于200米水深回声测深改正公式[J]. 测绘学报,第16卷第1期,1987年2月.
[3] 申家双 陆秀平. 水深测量数据处理方法研究与软件实现[J]. 海洋测绘,第22卷第5期,2002年9月.
[4] 刘雁春. 海洋测深空间结构及其数据处理[M]. 测绘出版社,2003.
[5] 交通运输部. 水运工程测量规范JTS131-2012[M]. 北京:人民交通出版社,2012.
(第一、三作者单位:长江水利委员会水文局长江口水文水资源勘测局,第二作者单位:上海祥阳水利勘测设计有限公司)endprint
