智能扫地车系统设计与研究
2015-10-15李雪艳
李雪艳
(北京工业职业技术学院机电工程系,北京100042)
0 引言
随着社会的进步和科技的发展,智能机器人的应用越来越广泛,家用电器也逐渐走向智能化,如一些简单而实用的送料机器人、吸尘器、家居机器人、自动扫地机器人等逐渐出现在人们的家庭生活中。未来智能家居机器人在人们的生产、生活中将起到巨大的作用,它将大大提高人们的劳动效率,改善人们的生活水平。本文设计的基于单片机技术的智能扫地机器人集合了单片机、电子信息、控制技术、计算机、机械、传感器、人工智能等诸多学科,有机地将吸尘器技术和移动机器人技术融合起来,有力地满足了普通室内卫生清扫以及危险环境的清洗工作,是对扫地智能机器人的一个有效尝试。
1 智能扫地车的总体方案设计
智能扫地车的主要构件有:扫地功能设计、行走驱动装置、清扫装置、垃圾收集装置、传感检测装置、爬壁装置、电源装置等,如图1所示。
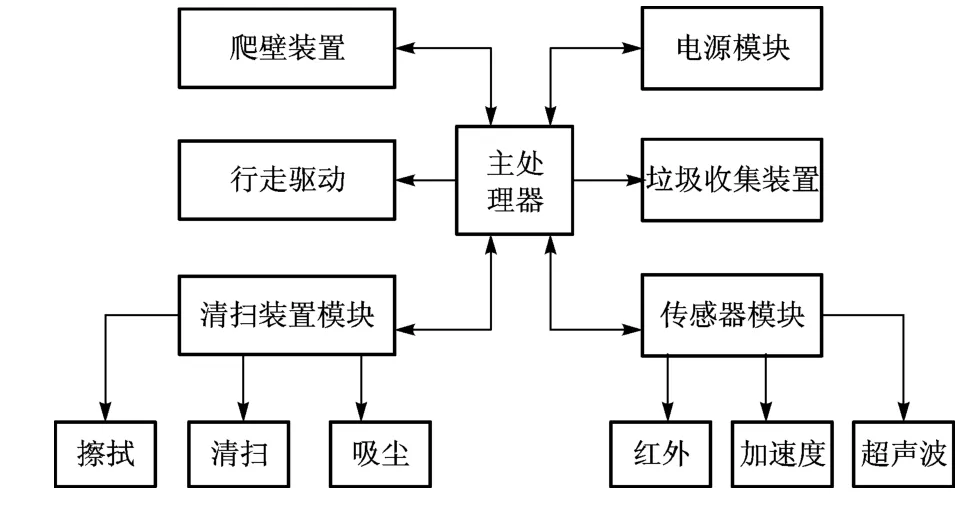
图1 系统总体结构图
1.1 扫地功能设计
在智能扫地车的底盘前方,设计两个转向相反的都由直流减速电机驱动的旋转扫帚,使两个扫帚的旋转方向相反且都向内侧旋转,以便于垃圾的收集。
1.2 行走驱动装置
智能扫地车的行走驱动采用的是电机带动驱动轮行走的方式。驱动轮安装于智能扫地车的底盘后端处,前端装上转向装置,驱动轮和转向装置在单片机控制下由电机驱动,来实现平稳前进、后退和转向等功能。这种行走驱动主要是由两个步进电机和电机驱动电路组成的。主处理器采用PWM控制方式,通过PWM控制可以方便地实现机器人的前进和左右电机的调速,可以方便地实现机器人前进、后退、左转、右转、调头等功能。
1.3 清扫装置
在智能扫地车底部安装吸尘器、软毛刷、清洁布等清扫装置,在扫地车行走过程中自动依次进行吸尘、扫地、擦地等工作,收集到的垃圾直接送进垃圾收集装置中,实现先扫后擦、深度清洁的目的。
1.4 垃圾收集装置
垃圾收集装置安装于智能扫地车底部、紧挨清扫装置的后方,它内部安装了具有吸尘功能[1]的吸尘风机,吸尘风机可以造成垃圾收集装置内外的气压差,该气压差可配合及保障前端清扫装置将垃圾直接送入垃圾收集装置。
1.5 传感检测装置模块
传感检测模块包括4个红外传感器、4个超声波传感模块[2]和3个循迹传感模块,主要功能是用于避障、避悬崖、路径循迹等等。(1)红外传感器。红外传感器安装于智能扫地车的前方,它利用物体的反射性质来探测机器人工作环境中的障碍物以避免碰撞。在一定范围内,如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头,反之发射出去的红外线,随着传播距离的增加而逐渐减弱,最后消失。当传感器检测到障碍物信号时,发送有障碍物信号给单片机处理器,单片机经过一系列分析处理,驱动机器人的驱动轮来躲避障碍物。(2)超声波传感器。根据超声波在不同媒质的界面处会产生反射现象,超声波传感器可以测得智能扫地车与障碍物的距离信息。单片机采取中断捕获的方式,超声波发射时,单片机开始计时,当接收到反射波时,停止计时,测得的时间就是超声波从发射到返回接收的时间间隔,根据波的传输公式可以计算智能扫地车与障碍物之间的距离。波的传输公式:S=(v×t)/2。其中,S为智能扫地车到障碍物的距离;v为超声波在空气中的传播速度;t为单次单片机从超声波发射到碰到障碍物返回并接收所经历的时间。(3)加速度传感器。加速度传感器用来测量智能扫地车在行走中的行走加速度和地面的倾斜度,此外,壁悬崖也可以用加速度传感器来测量。
1.6 爬壁装置
爬壁装置安装于智能扫地车的底部,当扫地车完成高层建筑或高空玻璃作业时,爬壁装置开始工作。而进行平地作业时,扫地行走装置工作。爬壁装置由四对曲柄滑块机构组成的强力吸盘组成,吸盘之间用皮带连接起来,根据对角线划分,四对强力吸盘分成两组,第一组松开后前进,另外一组保持吸附状态;同理,第二组松开前进时第一组保持吸附。两组之间交替进行,实现智能扫地车的整体运动。
1.7 电源装置
智能扫地车的电源不宜采取拖线的方式,因此必须为扫地车配上蓄电池,方便扫地车四处行动,因此,本系统采用锂电池来为智能扫地车供电。锂电池大致可分为两类:锂离子电池和锂金属电池。锂离子电池不含有金属态的锂,并且是可以充电的。本智能扫地车配有双节655085锂电池电池组,两路输出,具有热保护、带过流保护、过充保护、欠压保护功能。本智能扫地车除了配有锂电池以外,还在顶部安装有太阳能电池板,当智能扫地车不工作时,可以将其放在阳光下照射,将太阳能转化为电能存储于蓄电池中,以实现能源的绿色化、环保化。
2 智能扫地车的电路设计
2.1 智能扫地车的主体电控设计
本系统由一个STC89C51 40I-PDIP40单片机、四个红外传感模块、一个超声波模块、两个步进电机、一个L298N驱动芯片和一个细分器组成。通过单片机给细分器发送脉冲,细分器可控制步进电机的运动,步进电机为清扫装置提供工作的动力,同时驱动智能扫地车向前运动。超声波模块和红外传感器不断检测车前是否存在障碍物,加速度传感器检测前方是否有低洼或悬崖,当检测到障碍物或前方有低洼、悬崖时,传感器将反馈信号传送给单片机,从而实现自动避障(避悬崖)[3-7]。
2.2 智能扫地车的驱动控制设计
智能扫地车驱动主要包括电机控制驱动[8]、红外传感器驱动和系统时钟程序。(1)电机控制驱动。智能扫地车上包含有两个直流电机。它们由L298N驱动芯片驱动,每个电机有M1+、M1-、M2+、M2-两组控制线。当 Mx+为高电平、Mx-为低电平时,直流电机正向转动(x表示电机的序号)。反之,Mx+为低电平、Mx-为高电平时,直流电机反向转动。Mx+与Mx-都为高电平或低电平时,则电机停止运转。直流电机执行驱动任务时,单片机根据电机需要正转、反转或停止给予不同的电平。(2)红外传感器驱动。红外传感器的工作原理:实时检测传感器前方的障碍物到传感器的距离,然后输出一个距离的电压函数,驱动程序完成电压的测量,然后再经一个12位的ADC转化器将电压信号转化为距离信息。本程序采用三通道连续的转换方式,三通道分别对应前、后、左、右四个传感器,每间隔1 s执行一次。设置完成后启动转换,然后等待触发中断。由AD转换结果均值计算电压值,参考电压为3.3 V,AD位数为12 bit,根据逐次逼近式AD原理,电压计算公式为:ADC_Voltage=Vfer/2b×ADC_AvlResualtx(x=1,2,3)。(3)系统时钟程序。整个软件系统的核心是系统时钟,它控制所有程序的启动时机、模式切换节点及状态保持时间等涉及时间判断的机制。本系统时钟软件的时钟源使用高阶定时器TIM1。TIM1是高级控制定时器,它由一个可编程的预分频器驱动,可以产生输出波形或测量输入信号的脉冲宽度。预分频器选用RCC时钟控制预分频器和定时器预分频器,可以实现波形周期和脉冲宽度从微秒至毫秒的调节。
2.3 电路设计
智能扫地车的电路设计中最重要的是循迹避障模块,小车前方的循迹避障模块不断检测小车正前方是否存在障碍物,当检测到障碍物时,循迹避障模块将信号反馈给单片机,单片机发送驱动信号驱动步进电机转动,步进电机通过正转、反转或者停止带动驱动轮做相应运动,从而实现小车的避障。小车控制电路图如图2所示。

图2 小车控制电路图
3 结语
本文设计的智能扫地车,集扫地、擦地、清洗等功能于一体,解决了日常生活中地面上的垃圾问题,且在原行走驱动模块中增加了四对强力吸盘装置,可与四只驱动轮相互配合,既可在平地行走清扫,也可对垂直地面进行作业,如擦玻璃等,这样也可以解决高层住户玻璃窗台不好擦洗的难题。同时,小车顶部的太阳能电池板还可在阳光充足时对小车电池进行充电,既节能又绿色环保,能使智能扫地车更好地为清洁工做出贡献。
[1]马翔,朱世强,吴海彬.智能吸尘器的开发及设计[J].电子技术应用,2000,26(8):6-8.
[2]刘喜昂,周志宇.移动机器人的超声模糊避障算法[J].微计算机信息,2004(1):31-32.
[3]魏兵,熊禾根.机械原理[M].武汉:华中科技大学出版社,2007:5-30.
[4]李金山,李琳,谭定忠.清洁机器人概述[J].中国科技信息,2005(5):18.
[5]王洪,银金光.工程力学[M].北京:中国林业出版社,北京希望电子出版社,2006:175-300.
[6]郑玉华.典型机械(电)产品构造[M].北京:科学出版社,2004:230-400.
[7]邓英剑,杨冬生.公差配合与测量技术[M].2版.北京:国防工业出版社,2008:25-241.
[8]贺红林,赵淳生.机器人的超声电机驱动及其控制研究[J].压电与声光,2005,27(6):694-697.
