两轮独立驱动电动车驱动控制系统的研究
2015-10-15高志彬王大山牛贺功汪攀
高志彬,王大山,牛贺功,汪攀
(青岛理工大学,山东 青岛 266520)
两轮独立驱动电动车驱动控制系统的研究
高志彬,王大山,牛贺功,汪攀
(青岛理工大学,山东 青岛 266520)
文章以两轮独立驱动的电动车为研究对象,探讨了整车的驱动控制系统。系统以汽车稳定性为控制目标,基于横摆力矩实现车轮驱动力矩的分配,并在MATLAB环境下,建立了整车驱动控制系统的仿真模型,验证了控制系统的有效性。结果表明:基于横摆力矩的整车控制系统较好的跟踪目标参数,能有效提高汽车操纵稳定性。
两轮独立驱动;横摆力矩;模糊控制
10.16638/j.cnki.1671-7988.2015.09.005
CLC NO.: U469.7 Document Code: A Article ID: 1671-7988(2015)09-12-04
引言
随着能源危机、环境问题的日趋严重,节能环保的电动车日益受到人们的青睐。相比于传统燃油汽车和中置式电机驱动的电动汽车,多轮独立驱动电动车取消了发动机与传动系,对于提高能源利用率,缓解噪声与振动的问题,增强汽车主动安全与被动安全性能具有较大的优势。多轮独立驱动的电动车在转弯或者不平路面行驶时,需要采用电控方式控制各个车轮的驱动力矩分配,以实现电子差速和转矩协调功能。因此,两轮独立驱动电动车驱动控制系统的研究具有重要的应用价值[1]。
本文构建在两轮独立驱动电动车动力学模型的基础上,深入分析了以汽车稳定性为控制目标,采用模糊控制策略,基于横摆力矩的驱动控制系统;并在理论研究的基础上,在MATLAB/Simulink环境下,结合模糊控制工具箱,建立了整车转矩协调控制系统的仿真模型,并对其输出波形进行了分析研究,验证了控制系统的有效性。
1、整车动力学模型的建立
整车动力学模型是整个系统研究的基础,研究汽车运行特性时,需要以地面作为固定参考坐标系[2],如图1所示,以 X、Y、Z定义地面惯性坐标系,定义转向行驶的车辆质心与x、y、z坐标系的原点重合,x轴方向是车辆纵向速度的方向,y轴方向是横向速度的方向,z轴垂直于x、y平面向上。x轴与X轴的夹角为车身的航向角ψ,即两坐标系的夹角ψ,则绕z轴的方向上的横摆角速度γ=。
假设将转角输入直接作用于车轮,即忽略转向系统;车辆在平坦路面行驶,即忽略z轴方向上的运动。包括悬架系统在内的车辆结构是刚性的,即不考虑汽车绕x、y轴的转动,建立包括三个车身自由度:纵向、横向、横摆,四个车轮的转向自由度的七自由度整车动力学模型,如图1所示。
构建了汽车纵向、横向和横摆运动动力学方程得:纵向运动动力学方程:
横向运动动力学方程:横摆运动动力学方程:

2、整车驱动控制系统的设计
整车驱动控制系统基于汽车稳定性的控制目标,将横摆角速度和质心侧偏角作为目标参数,通过二自由度的车辆模型,完成对控制目标参数期望值的计算,通过质心侧偏角观测器与整车模型反馈得到目标参数的实际值,以目标参数的误差值为输入量,基于模糊控制输出汽车所需的横摆力矩,结合电子油门踏板输入转矩期望值,实现车轮驱动力矩的分配。整个控制系统(如图2所示)分为三个部分:控制目标参数的制定、基于模糊控制的横摆力矩的控制和转矩分配模块。
2.1系统控制目标参数的制定
汽车动力学稳定性包括两个方面:轨迹保持问题和汽车的稳定性问题。轨迹保持即汽车能够按照预设的轨迹运行,通常用质心侧偏角来评价。汽车的稳定性即汽车不发生侧滑、激转,通常用横摆角速度的来评价。当质心侧偏角较大时,根据β-method 理论,轮胎的侧向力和车身的横摆力矩都趋于稳定值如图(3)所示,轮胎处于非线性状态,改变轮胎转角,已经不能有效的控制车辆的转向。当质心侧偏角较小时,汽车稳定性可以用前后轮侧偏角的差值来描述,当前轮侧偏角大于后后轮侧偏角时,汽车为不足转向,反之则为过多转向[3]。因此,基于操纵稳定性的整车控制系统应当将横摆角速度和质心侧偏角作为系统控制目标参数。
2.1.1横摆角速度期望值与实际值的制定
根据汽车线性二自由度汽车动力学方程:
综上分析,横摆角速度的期望值应该表示为:
在汽车实际运行中,横摆角速度可以通过传感器进行实时测量获得,根据图2可以看出,横摆角速度的实际值可以整车模型反馈获得。
2.1.2质心侧偏角期望值与实际值的制定
汽车的运动轨迹是用质心侧偏角来评价的,在运行中,偏离预设轨迹,汽车将失去稳定性,因此应尽可以能减小质心侧偏角,使汽车按照预设轨迹运行,故将质心侧偏角的期望值设置为0,即βd=0。
在汽车实际运行中,横摆角速度可以直接获得,而质心侧偏角无法直接测量,本文通过质心侧偏角状态空间观测器对其进行估算,得到实际值,从而得到质心侧偏角的误差,输入到横摆力矩控制模块。根据整车七自由度的整车模型与轮胎侧偏特性分析,质心侧偏角的状态空间方程观测器可表示为[4]:
2.2基于模糊控制的横摆力矩的控制
基于模糊控制的横摆力矩的控制模块是以横摆角速度和质心侧偏角的误差 e(γ)、e(β)为控制变量,通过模糊推理,得到保持汽车稳定行驶所需要的横摆力矩,整个模块主要包括物理量的模糊化、模糊规则的制定以及模糊量的清晰化三个部分。
本文根据相关仿真实验数据,对横摆角速度误差 e(γ)和质心侧偏角的误差 e(β)以及横摆角速度Mz进行模糊化。横摆角速度误差 e(γ)的论域设定为e(γ)∈[-0.6,0.6],质心侧偏角e(β)的论域设定为e(β)∈[-0.3,0.3],横摆力矩的论域设定为Mz1∈[-1,1];e(γ)的语言变量设为五档分别为:负大(NB)、负中(NM)零(ZE)正中(PM)、正大(PB), e(β)语言变量同样分为五档;横摆力矩语言变量分为七档分别为:负大(NB)、负中(NM)、负小(NS)、零(ZE)、正小(PS)正中(PM)、正大(PB)。模糊集的隶属度函数采用了梯形和三角形隶属度函数,用图形表示法表示如图(4)、(5)、(6)所示。
模糊控制器是按照模糊规则进行模糊推理的,模糊规则是以模糊语言的形式描述操作人的经验,本文设计的模糊控制器的模糊规则共 25条如表 1所示,模糊推理方式采用Mamdani直接推理算法。模糊控制的输出Mz1应为有确定值的清晰量,因此,需要将模糊量转化为清晰量输出,本文采用重心法,每条模糊规则对应的权重分配如表(1)所示。经过清晰化的横摆力矩是在模糊集上论域的值,转化为实际值要乘以相应的比例因子,根据仿真实验数据将比例因子确定为200,因此,实际值应为200Mz1。
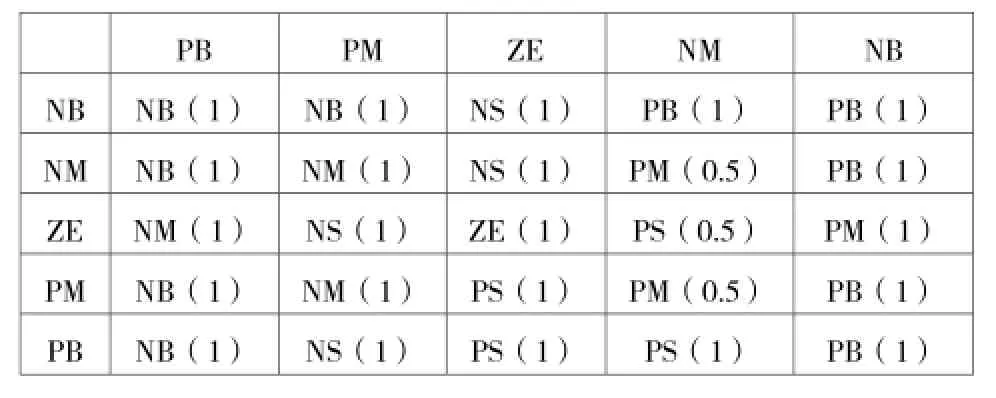
表1 模糊控制规则表及权重设置
在实际中,当车轮驱动力大于地面附着力时,汽车会出现车轮滑转的现象,因此,汽车所需要的横摆力矩需要考虑地面附着力约束。因此,基于模糊控制制定的横摆力矩最大值应为:
当模糊控制输出的横摆力矩大于地面能提供的横摆力矩时需要限制为Mmax,否则不起作用,即:
2.3驱动力矩的分配
驱动力矩分配层是根据油门踏板输入的期望转矩 Td以及横摆力矩制定模块输出的转矩Mz,进行转矩分配。驱动力矩一方面要满足油门踏板预定期望值,另一方面要满足整车力矩平衡[5],即:要满足公式(10)和(11):
3、两轮独立驱动控制系统的仿真分析
为了验证控制系统的有效性,需要对两轮独立驱动控制系统进行仿真分析,以某汽车为例(具体参数如表2所示),分析在前轮角阶跃输入工况下,系统目标参数的输出波形。根据美国ESV实验标准:汽车先以直线行驶,达到实验车速(40km/h及110km/h)后,突然以不小不小于500°/s的角速度(如图7所示)转动方向盘,方向盘转角输入为0.1rad保持不变,油门也不变[6]。
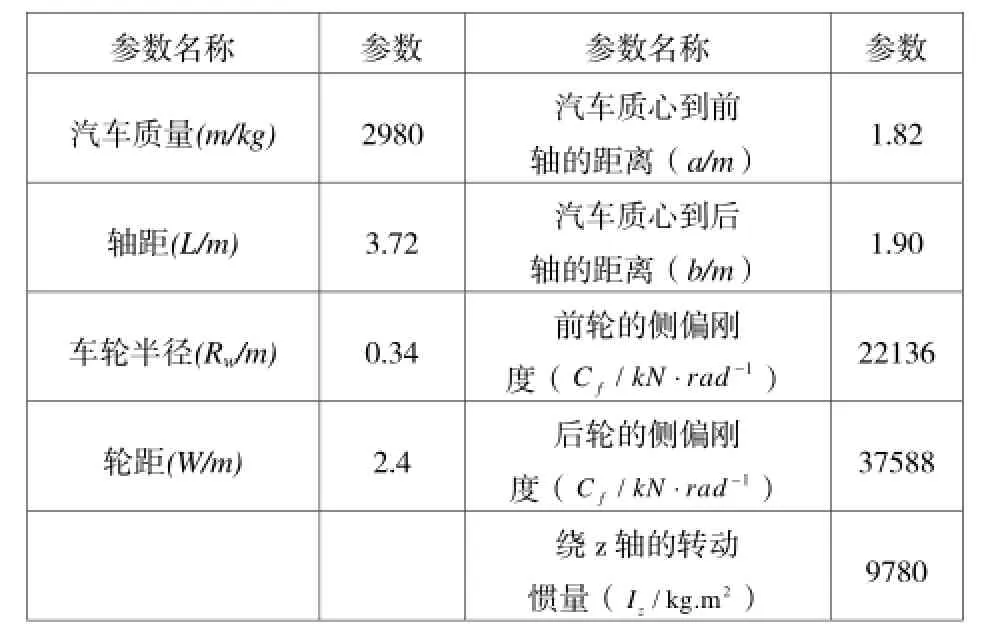
表2 汽车的结构参数
从图8可以看出,汽车在1s时前轮角阶跃输入,未控制的车辆在1.8s时,横摆角速度达到峰值0.3rad/s,在3.2s时达到稳态0.27rad/s,质心侧偏角在2s时达到最大值0.072rad,2.8s时趋于稳定为0.07rad。施加横摆力矩后,横摆角速度波形的上升时间和峰值时间明显缩短,响应波动较小,在 2s趋于稳态,稳态误差较小,质心侧偏角 2s达到稳态约为0.035rad。显然,在汽车低速运行时,驱动力矩分配控制子系统控制时横摆角速度响应速度快,能够很好的跟踪期望值,质心在侧偏角控制在很小的范围内,证明系统在汽车低速急转弯时是有效的。
从图9可以看出,汽车在高速急转弯时,未控制的车辆1.7s时,横摆角速度达到峰值 0.28rad/s,在 3s时趋于稳态0.2rad/s,质心侧偏角在2.2s时达到最大值0.11rad,2.8s时趋于稳定值为 0.95rad,施加横摆力矩后,横摆角速度在 1.6s时达到峰值0.17rad/s,在2.2s波动较小,趋于稳态,在3s时,基本与期望值重合,质心侧偏角2s达到稳态约为0.5rad。据此可以看出,整车控制系统能在高速运行时也能有效的控制车辆的稳定运行。
4、结论
本文以两轮独立驱动的电动车为研究对象,探讨了以横摆角速度和质心侧偏角的误差为控制变量,基于横摆力矩控制的整车驱动控制系统。MATLAB/Simulink仿真分析表明有控制的车辆能够很好的跟踪期望值,响应快、超调小,有效的提高了汽车的操纵稳定性。
[1] 李刚.四轮独立驱动轮毂电机电动汽车研究综述[N].辽宁工业大学学报,2014(01):47-52.
[2] 喻凡,林逸. 汽车系统动力学[M].北京:机械工业出版社,2014.
[3] 程军. 汽车动力学控制的模拟[J].汽车工程,2013,04:199-205.
[4] 周翠玉.微型电动汽车电子差速控制的研究[D].河北联合大学,2013.
[5] 蒋振江.四轮独立驱动电动汽车驱动控制策略的研究[D].重庆理工大学,2012.
[6] 余志生.汽车理论[M].北京:机械工业出版社,2009.
Research on the driven control system of electric vehicle driven by two independent wheels
Gao Zhibin, Wang Dashan, Niu Hegong, Wang Pan
( Qingdao Technological University, Shandong Qingdao 266520 )
The paper takes electric vehicle driven by two independent wheels as the research object,discussed the drive control system of the vehicle.The system takes automobile stability as the control target,distribution of wheel drive torque based on yawing moment control. In the MATLAB,the simulation model of the vehicle driving control system is established,to show the validity of the control system is verified. The results show that tracking target parameters based on the yaw moment vehicle control system can effectively improve vehicle handling stability.
Driven by two independent wheels; Yawing moment; Fuzzy control
U469.7
A
1671-7988(2015)09-12-04
高志彬,副教授,就职于青岛理工大学,研究方向为汽车电子和汽车动力学。
