磁耦合谐振无线电能传输系统的输出鲁棒控制
2015-07-08刘军,杜欢
刘 军,杜 欢
(西安理工大学自动化学院,陕西西安710048)
磁耦合谐振无线电能传输系统的输出鲁棒控制
刘军,杜欢
(西安理工大学自动化学院,陕西西安710048)
摘要:磁耦合谐振无线电能传输系统的负载和谐振参数会因为受到外界环境的影响而发生变化,系统工作频率发生随机漂移,导致模型参数存在不确定性。针对参数不确定下的输出鲁棒控制问题,基于H∞控制理论,应用matlab鲁棒控制工具箱设计H∞控制器,并利用结构奇异值法分析了闭环系统的鲁棒稳定性和鲁棒性能。结果表明,在H∞控制器的作用下,实现了闭环摄动系统的输出鲁棒控制。并为这种高阶非线性不确定闭环摄动系统提供一种通用的控制器设计方法。
关键词:无线电能传输;谐振式;不确定性;H∞控制;matlab工具箱;鲁棒性
1 引言
磁耦合谐振无线电能传输系统(magnetically coupled resonant wireless power transfer,MCR-WPT)在实际工作中,负载和谐振参数会因为受到外界环境如温度、谐振线圈距离的影响而发生变化,系统工作频率发生随机漂移,导致模型参数存在不确定性。因此,希望设计一种控制器,使控制系统在实际应用中具有一定的鲁棒性[1-5]。
在提高系统的鲁棒性方面,以往的bang-bang控制、PID控制、滑模变结构控制这一类单目标控制方法[6-9]虽然易于实现且具有一定的鲁棒性,但其控制精度和对负载变化的适应能力较差,且均未考虑系统可能存在的不确定因素及外部扰动,当实际系统与原来的标称系统出现偏差时,控制器的精度及性能会变差,控制系统将无法达到较理想的控制效果。
本文首先利用广义状态空间平均(generalized state space averaging,GSSA)建模法对磁耦合谐振无线电能传输系统进行建模,利用线性分式变换分离GSSA模型的确定部分与不确定部分。基于H∞控制理论,应用matlab鲁棒控制工具箱设计H∞控制器,并利用结构奇异值理论分析闭环系统的鲁棒稳定性和鲁棒性能。
2 系统GSSA建模
2.1 GSSA建模方法
基于频域分解的GSSA建模法的基本思想是用傅里叶级数的形式来描述时域周期信号,用共轭的低阶谐波分量来近似原始信号,并将非线性环节近似线性化处理,然后通过信号还原得到时域原始信号的包络及其近似解[10]。
时域连续周期性信号x(t)可以分解成Fourier级数的形式。

式(1)中,n表示第n次谐波的分量,ω0=2π/T是x(t)基波的角频率,<x>k(t)为x(t)的k阶Fourier级数的系数,即为n次谐波分量的幅度值,傅里叶级数有共轭对称性、微分特性、卷积特性、线性特性4个重要性质,不再赘述。
2.2系统建模
磁耦合谐振无线电能传输系统的电路拓扑如图1所示。
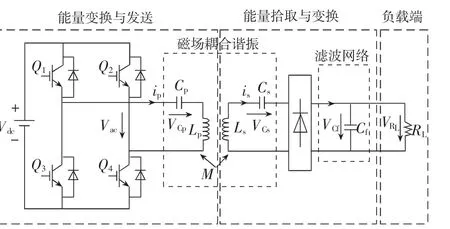
图1 MCR-WPT系统的电路拓扑
图1中左半部分是电能的发射端,包含工作在ZCS模式下的高频逆变环节和LpCp串联谐振环节;副边部分作为能量拾取端,包括串联谐振、整流及滤波三个环节。为了有效地传输电能,发射线圈和接收线圈的自谐振频率设置为同一频率,即为系统的谐振频率。
由电路拓扑得到系统时域非线性微分方程,其中,状态变量为[ip,is,VCs,VCp,VCf]T。
MCR-WPT系统工作过程中,由于逆变器工作在ZCS模式,保证各个储能元件上的能量呈正弦规律变化,因此,对时域微分方程做Fourier级数分解时,交流信号只考虑基波。
分解后得到系统的频域线性微分方程,其中,以电路变量各傅里叶系数的实、虚部依次作为广义状态变量,即
x(t)=[Re<ip>1,Im<ip>1,Re<is>1,Im<is>1,Re<VCp>1,
Im<VCp>1,Re<VCs>1,Im<VCs>1,<VCf>0]T(2)
基于频域线性微分方程,得到以式(2)作为状态变量的广义状态空间描述(GSSA模型)如下。
x(.t)=Ax(t)+Bu(t)(3)
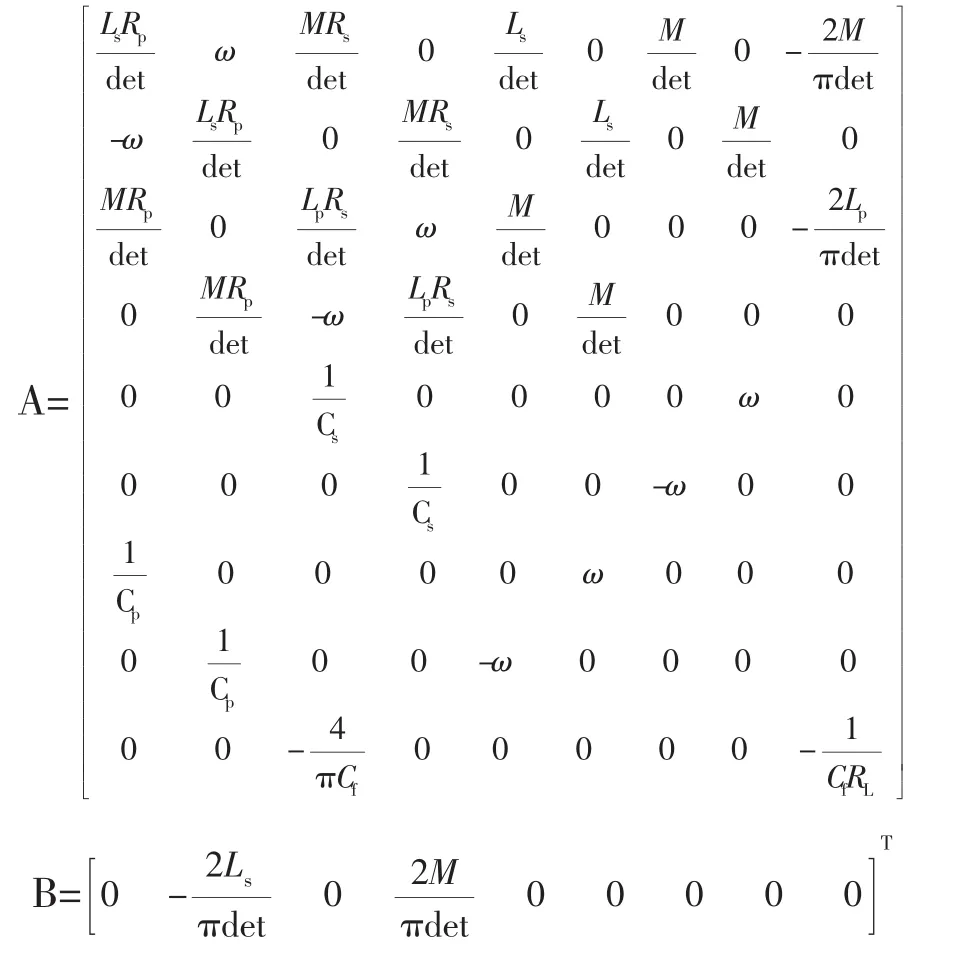
其中,u∈R1×1作为控制输入即为MCR-WPT系统的直流输入电压Vdc,A∈R9×9和B∈R1×9分别为系统矩阵和输入矩阵,且
3 参数摄动下的系统不确定性模型
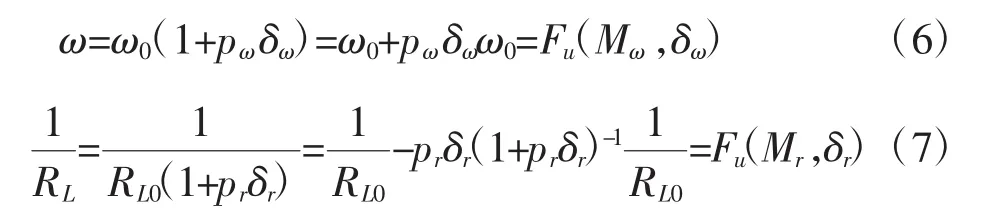
在实际工作中,负载RL和工作频率ω具有不确定性,可以用以下式子描述。

ω0和RL0分别表示ω和RL的标称值,pω,pr和δω,δr分别代表ω和RL的可能的(相对)摄动变化范围。令pω=0.2,pr=0.4,以及-1≤δω,δr≤1,则表示ω在标称值ω¯的±20%的范围内变化,RL在标称值RL0的±40%的范围内变化。
采用线性分式变换,分离RL和ω的确定与不确定部分,表示为:
从而分离GSSA模型的标称部分和不确定部分,得到MCR-WPT系统的不确定性模型,状态方程表示为:
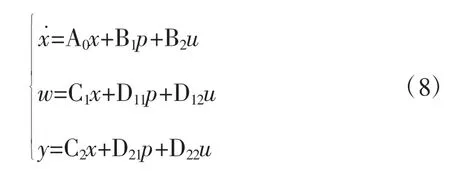
式(8)用一个含摄动反馈的线性动力学系统G=Fu(Gmds,Δ)表示,如图2所示。
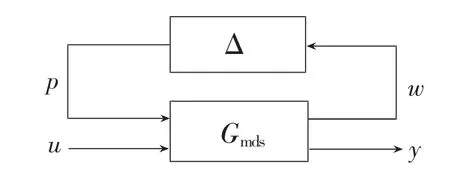
图2 系统不确定模型
式(8)中,x∈R9×1为状态变量,u∈R1×1为控制输入,即MCR-WPT系统的直流输入电压值Vdc,y∈R1×1为测量输出(负载输出电压VCf),Δ为一个只含δω和δr的不确定对角阵即

p、w∈R9×1分别为摄动块Δ的输入和输出

Gmds是广义标称模型,
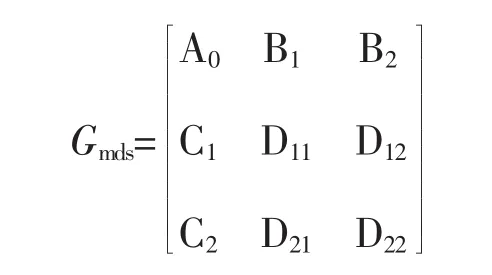
式(8)中各矩阵如下:
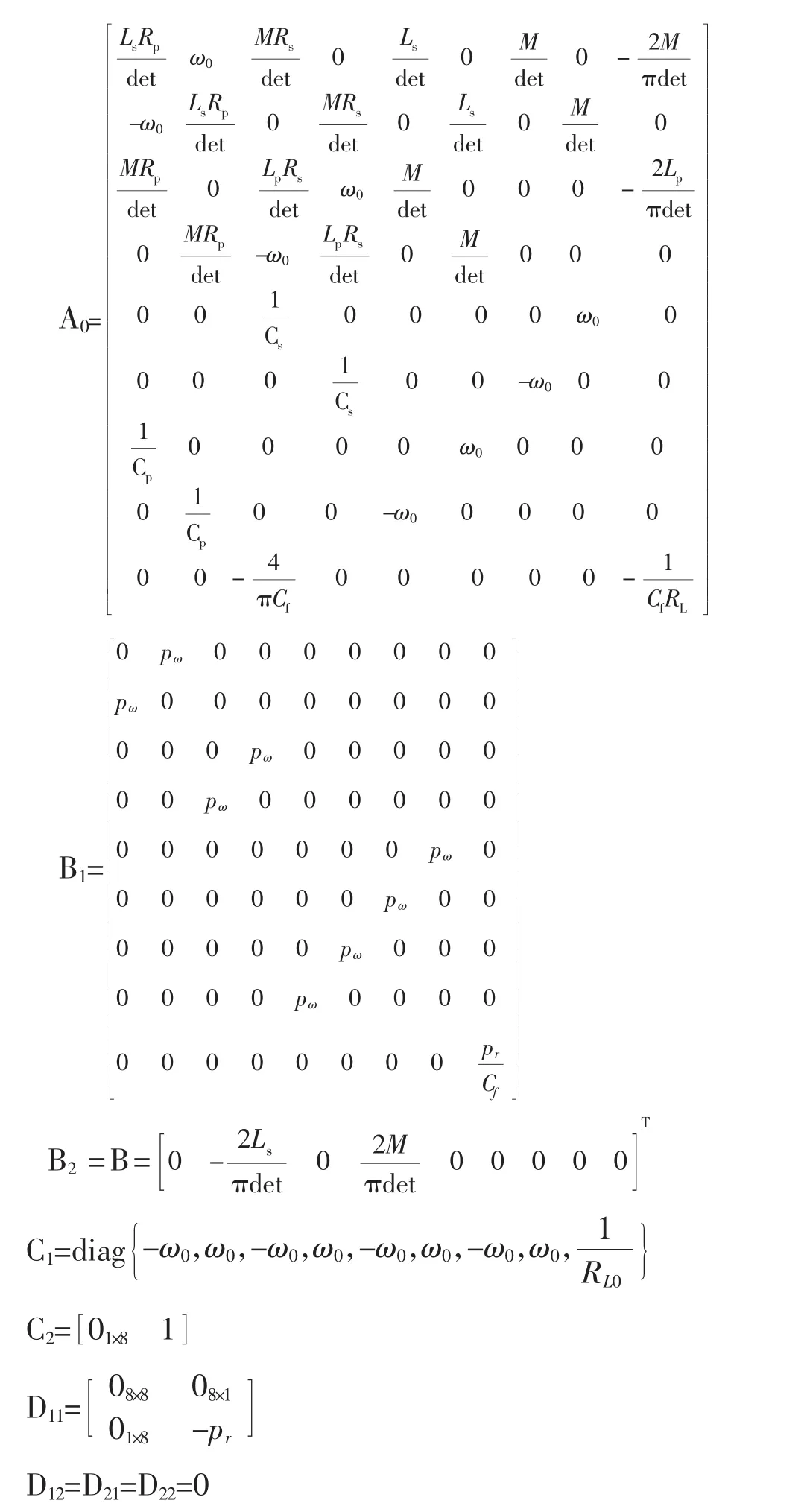
在matlab里创建系统矩阵Gmds,保存为变量Gmds。Gmds=pck(A0,[B1,B2],[C1,C2],[D11D12;D21D22]);
4 H∞控制器设计
4.1标准H∞控制问题描述
如图3所示为标准H∞控制问题。
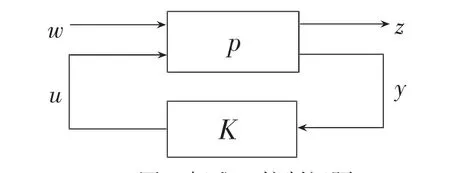
图3 标准H∞控制问题
其中z为被控输出信号, y为测量信号, w为外部输入信号, u为控制信号。
标准H∞控制问题就是求一正则控制器K(s),满足
1)使闭环系统内稳定;
2)使w到z的传递函数的H∞范数满足。

式(12)表示最优H∞控制问题。式(13)则表示H∞次优控制问题。
4.2系统连接
MCR-WPT闭环系统框图如图4所示。
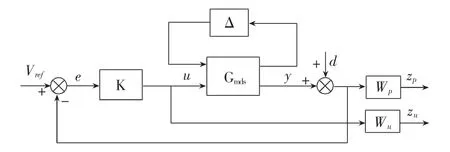
图4 MCR-WPT闭环系统框图
设计H∞控制器之前,首先基于matlab创建系统的开环系统结构。图5所示为系统的开环结构图。
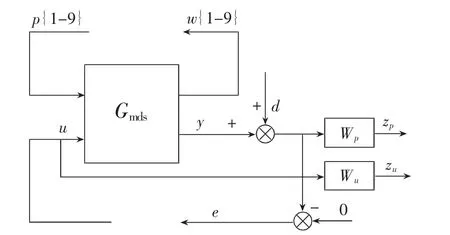
图5 开环系统结构
图5中,Wp是一个低通滤波函数,代表干扰的频谱特性,Wu描述中低频参数的频率特性,可以选择为一常数并进行适当调整,取

不确定块Δ的输入变量w和输出变量p都包含9个元素;控制量u、外加干扰d、被调输出zp、zu和e只有一个元素。
sysic指令用来创建开环系统结构,保存为变量sys_ic,系统参数如表1所示。
systemnames=’GWp Wu’;
inputvar=’[p{9};d;u]’;
outputvar=’[G(1:9);Wp;Wu;-G(10)-d]’;
input_to_G=’[p;u]’;
input_to_Wp=’[G(10)+d]’;
input_to_Wu=’[u]’;
sysoutname=’sys_ic’;
cleanupsysic=’yes’;
sysic
变量sys_ic包含11个输入和12个输出,如图6所示。
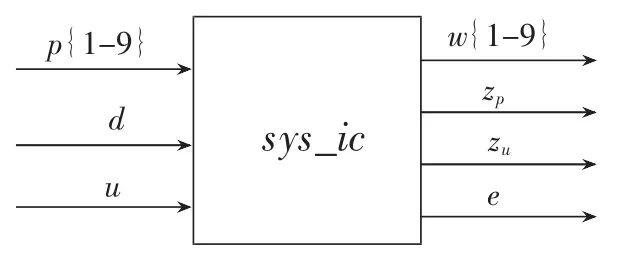
图6 开环系统结构的变量表示
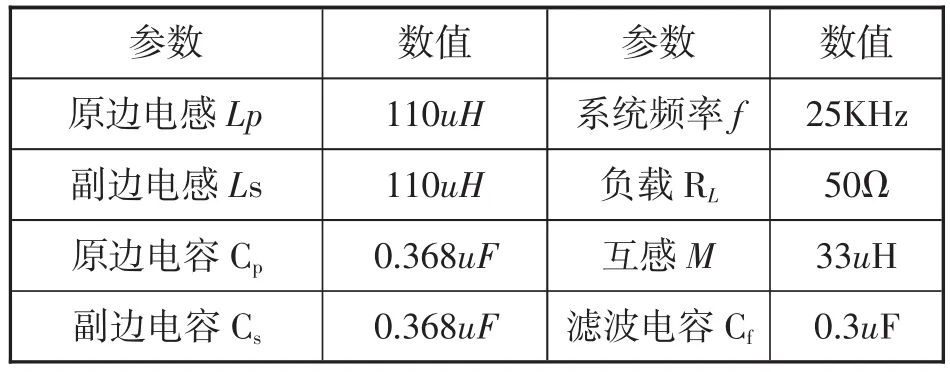
表1 系统参数表
转换为H∞标准控制问题,结构框图如图7所示。

图7 H∞标准控制框图
利用sel指令从变量sys_ic中提取传递函数矩阵P(增广对象),保存为变量hin_ic。
hin_ic= sel(sys_ic,10:12,10:11)
H∞控制下的闭环系统的线性分式变换形式如图8所示。
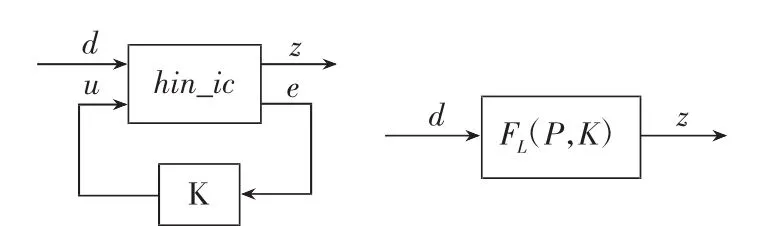
图8 H∞控制系统的线性分式变换形式
4.3 H∞次优控制器设计
如图8所示,FL(P,K)是标称闭环系统从干扰(变量d)到输出z=[zp,zu]T的传递函数。求一稳定的控制器K,该控制器能使FL(P,K)的H∞范数小于一给定的性能参数γ。
‖FL(P,K)‖∞<γ(γ>0)基于给定的开环系统,利用指令hinfsyn计算H∞次优控制器,hinfsyn的语法和输入、输出参数如表2、表3所示。[k,clp]= hinfsyn(p,nmeas,ncon,glow,ghigh,tol)。基于以上分析,通过以下程序求得H∞次优控制器。
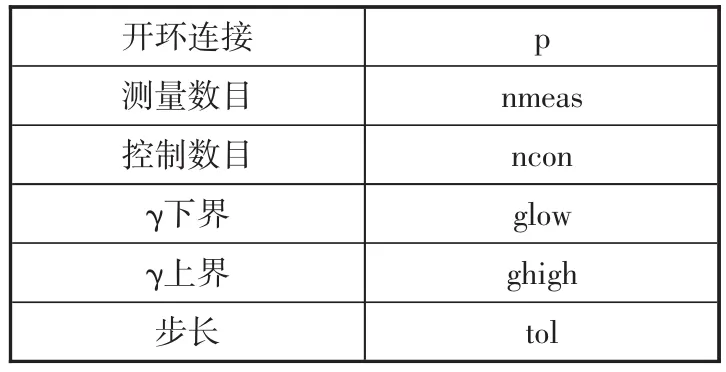
表2 输入参数

表3 输出参数
nmeas = 1;
ncon = 1;
gmin = 1;
gmax = 10;
tol = 0.001;
hin_ic = sel(sys_ic,10:12,10:11);
[k,clp]= hinfsyn(hin_ic,nmeas,ncon,gmin,gmax,tol)
5 基于结构奇异值(μ方法)的闭环系统性能分析
5.1标称闭环系统性能分析
如图9所示为标称系统的闭环结构,此时系统的不确定部分为考虑在内。
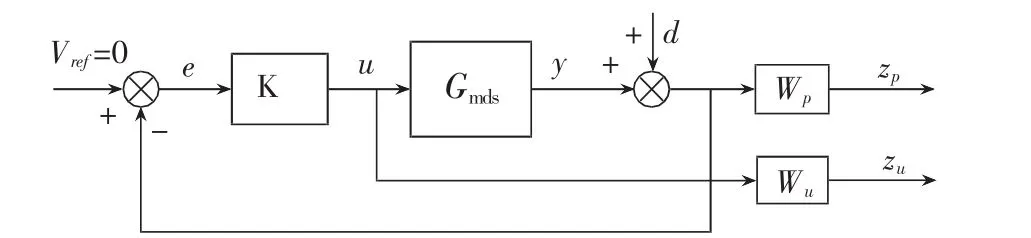
图9 标称系统的闭环结构
图9中,其标称性能指标可以采用从外部扰动输入d到被调输出z=[zp, zu]T之间传递函数矩阵Tdz(s)的H∞范数来描述,即:

当式(15)成立时,则表示H∞控制器能有效地把外部干扰的影响抑制到可允许的范围内,系统内部稳定且满足预设标称性能。图10所示是闭环系统从外部干扰d到被调输出z的响应曲线。
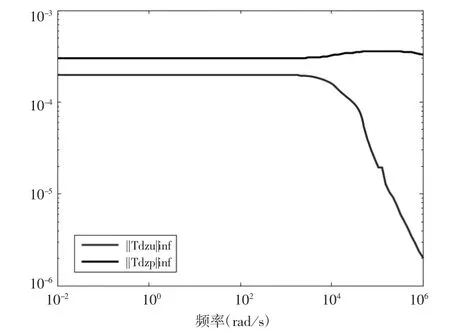
图10 闭环系统标称性能
如图10所示,在H∞控制作用下,闭环系统在频率[10-2106]范围内响应的值均小于1。表明该控制系统不仅是内部稳定的,而且满足了预设的标称性能指标。
5.2鲁棒稳定性分析
将H∞控制系统转换为标准的M-Δ结构。

图11 标准M-Δ结构图
图11中,M为闭环系统的广义标称对象,包含鲁棒控制器K,标称对象Gmds及性能加权函数。
若传递函数矩阵M(s)是稳定的、实有理的,且有np+nd个输入和nw+nz个输出(np=9 nd=1 nw=9 nz=2),那么M(s)可以表示成以下的子矩阵分块形式:
M11有np个输入和nw个输出,摄动块Δ∈Cnw×np对应子矩阵M11的不确定性传递函数。稳定性定理可以等价为:

在H∞控制器的作用下,μΔ(M11)在频率范围[10-2,106]的响应曲线如图12所示。
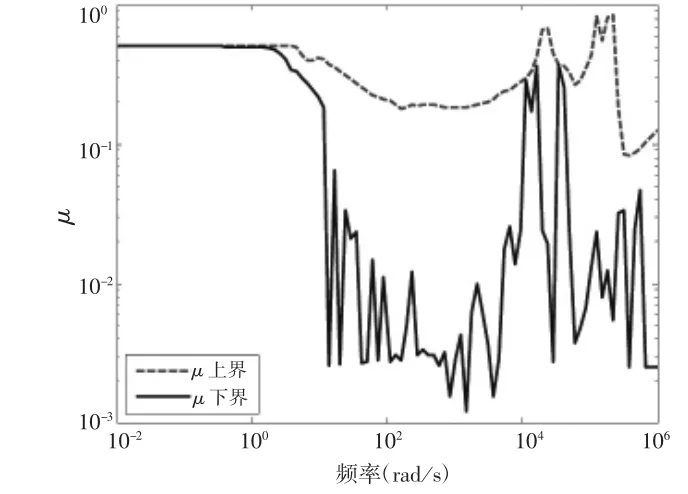
图12 闭环系统的鲁棒稳定性
如图12所示,在整个[10-2,106]频率范围内,子矩阵块M11关于摄动块Δ的结构奇异值μΔ(M11)都小于1,表明在参数摄动下,闭环系统具有鲁棒稳定性。且μΔ(M11)的峰值表示最大摄动范围。
5.3鲁棒性能分析
在不确定矩阵Δ∈Cnw×np中加入性能不确定全块Δp∈Cnd×nz组成一个增广摄动矩阵Δ∈C(nw+nd)×(np+nz),如图13所示。
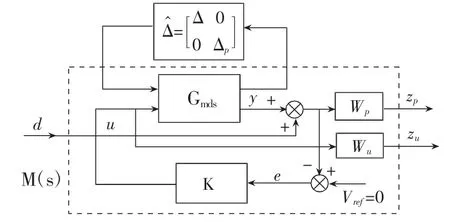
图13 鲁棒性能框图
从扰动输入d到被调输出z=[zp, zu]T的传递函数的H∞范数
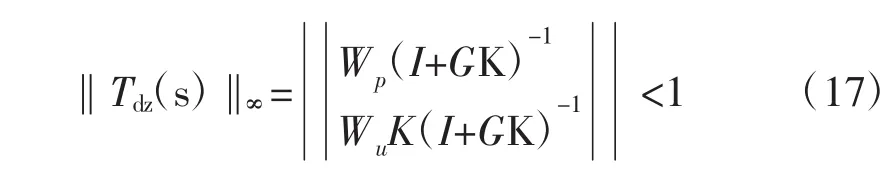
当且仅当

成立。
根据式(18),可知闭环系统是否达到了预设的鲁棒性能指标。
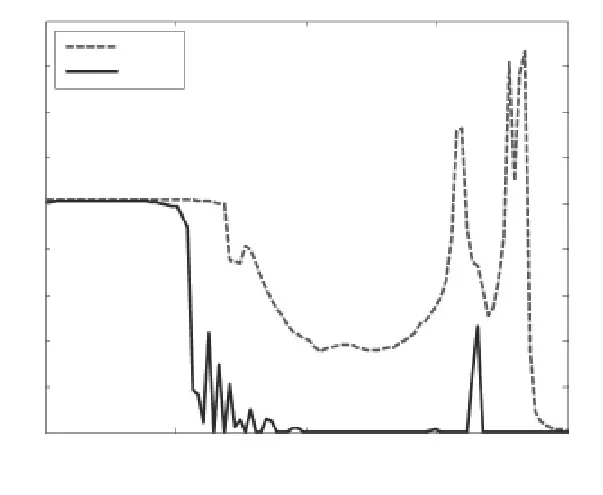
图14 闭环系统的鲁棒性能
由图14可知,在[10-2,106]频率范围内,μΔ0(M)的上、下界的频率响应值都比1小,即验证了H∞控制系统的鲁棒性能。
6 参数变化下闭环摄动系统的输出响应
鲁棒控制系统对属于这个集合的所有摄动对象均应保证正常工作的属性。本节通过测试摄动闭环系统,来验证H∞控制对闭环摄动系统的鲁棒性。
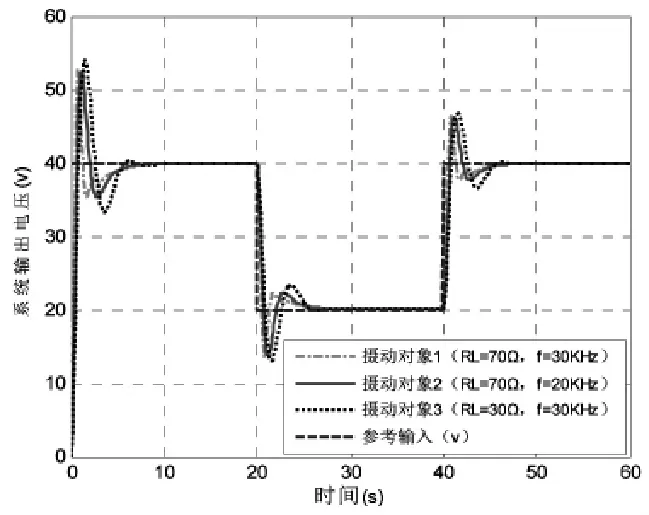
图15 3个闭环摄动系统在给定参考输入下的输出响应
标称值ω0=25kHz,RL0=50Ω,令pω=0.2,pr=0.4,以及-1≤δω,δr≤1。这里δω,δr分别取+1,-1。得到Δ的3种不同矩阵形式,对应参数变化下的3种的闭环摄动对象,验证H∞控制器的控制效果。图15和图16分别是参数变化下3个摄动闭环系统在给定参考输入和干扰作用下的时域响应曲线。
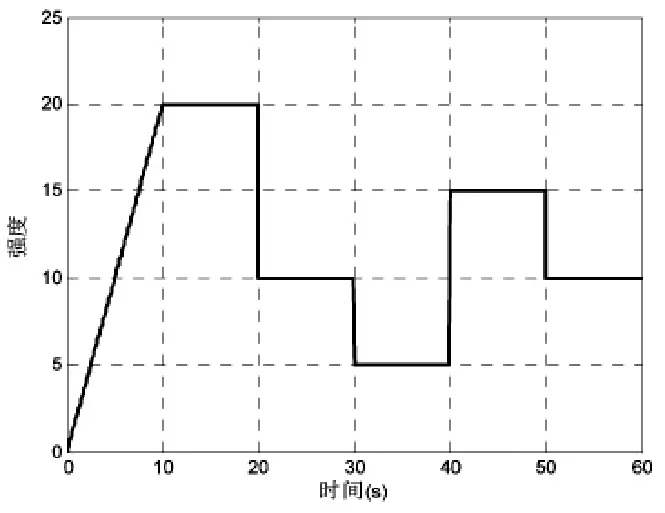
(a)扰动信号
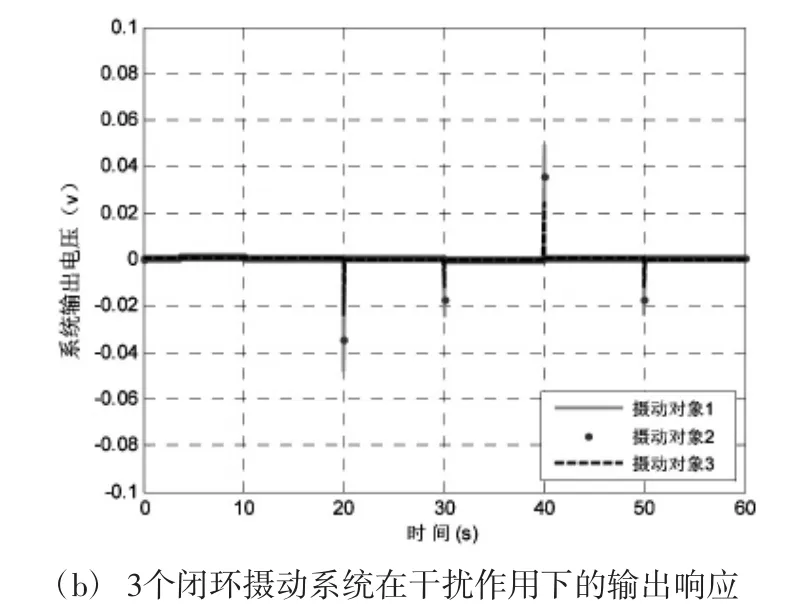
图16 3个闭环摄动系统在干扰作用下的时域响应曲线
基于上述分析,针对摄动范围内的所有可能的控制对象,当给定参考输入和干扰输入时,摄动范围内所有闭环摄动系统暂态响应曲线如图17和图18所示。
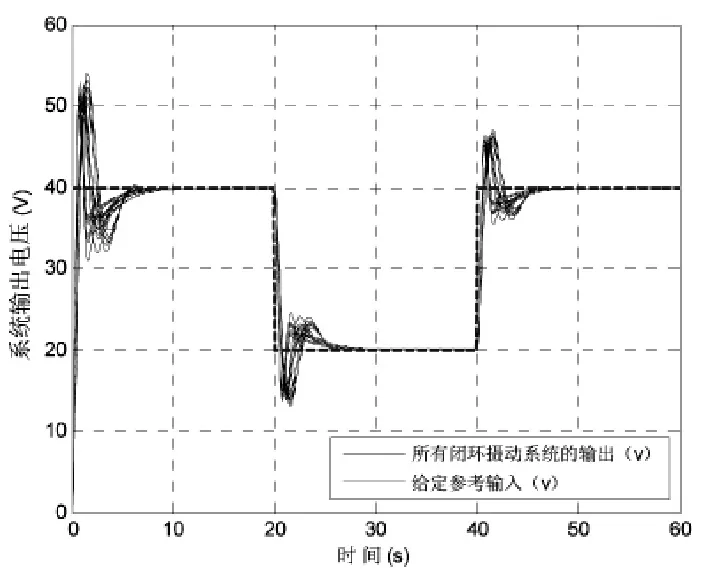
图17 闭环摄动系统在给定输入下的输出响应
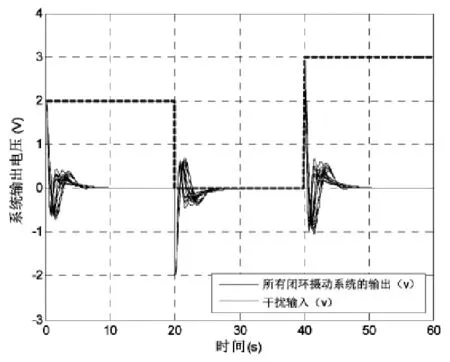
图18 闭环摄动系统在干扰输入作用下的输出响应
由图17可知,在给定输入的情况下,超调量都不大于29%,动态调节时间在5s左右。这表明在H∞控制作用下,实现了闭环摄动系统的无静差鲁棒跟踪控制。
由图18可知,闭环摄动系统在受到干扰输入的影响下,系统的输出在经过一定调节时间后都趋于0并最终稳定在0,这表明干扰对闭环摄动系统的输出几乎无影响。
总体说来,在H∞控制作用下,针对有界摄动范围内的所有可能的控制对象,闭环系统不仅是鲁棒稳定的,而且具有一定的鲁棒性能。
7 结束语
本文利用基于频域分解的广义状态空间平均法对磁耦合谐振无线电能传输系统进行建模,基于H∞控制理论,采用MATLAB鲁棒控制工具箱设计了H∞控制器,综合考虑参数不确定性和外部扰动因素影响下的闭环摄动系统,在H∞控制作用下,实现了闭环系统的输出鲁棒控制。
参考文献:
[1]赵争鸣,张艺明,陈凯楠.磁耦合谐振式无线电能传输技术新进展[J].中国电机工程学报,2013,33(3):1-12.
[2]黄学良,谭林林.无线电能传输技术研究与应用综述[J].电工技术学报,2013,28(10):1-9.
[3]Kurs A,Karalis A,Moffatt R,et al.Wireless power transfer via strongly coupled magnetic resonances[J].Science,2007,317(5834):83-86.
[4]韩腾,卓放,闫军凯等.非接触电能传输系统频率分叉现象研究[J].电工电能新技术,2005,24(2):44-47.
[5]Zhang Xian,Yang Qingxin,Chen Haiyan,et al.Research on characteristics of frequency splitting in electromagnetic coupling resonant power transmission systems[J].Proceedings of the CSEE,2012,32(9):167-173(in Chinese)
[6]傅文珍,张波,丘东元.频率跟踪式谐振耦合电能无线传输系统研究[J].变频器世界,2009(8):41-46.
[7]王智慧.基于包络线调制的非接触电能传输模式研究[D].重庆大学,2009.
[8]唐春森.非接触电能传输系统软开关工作点研究及应用[D].重庆大学,2009.
[9]戴欣,孙跃.感应电能传输系统能量注入控制方法研究[J].电子科技大学学报,2011(1):69-72.
[10]Robust control for an uncertain LCL resonant ICPT system using LMI methodYan-Ling Lin,Yue Sun,Xin Dai.Control Engineering Practice 21(2013)31-41.
Output robustness control of the magnetic coupling resonant wireless power transmission system
LIU Jun,DU Huan
(College of Automation,Xi'an University of Technology,Xi'an 710048,China)
Abstract:The loads and resonant parameters of the magnetic coupling resonant wireless power transmission system are subjected to the influence of the external environment and change,and the operating frequency may randomly drift to make the model parameters uncertain.In order to solve the problem of the robustness output control with uncertain parameters,the H∞controller is designed by using the Matlab robust control toolbox based on H∞control theory.The robustness stability and performance of the closed-loop system are analyzed by using the structure singular method.The experimental results show that the H∞controller realizes the output robustness control of the closed-loop perturbation system and provides a general design method for such high-order nonlinear uncertain closed-loop perturbation system.
Key words:wireless power transmission;resonant;uncertainty;H∞control;Matlab Toolbox;robustness
中图分类号:TM724
文献标识码:A
文章编号:1005—7277(2015)05—0016—07
作者简介:
刘军(1963-),男,陕西西安人,博士,教授,博士生导师,研究方向为无线电能传输。
杜欢(1990-),女,陕西西安人,硕士,研究方向为无线电能传输。
收稿日期:2015-01-05
