IMMPF算法在反舰导弹跟踪滤波中的应用
2015-06-23雷振达马春草
雷振达,马春草
(江苏自动化研究所,江苏 连云港 222061)
IMMPF算法在反舰导弹跟踪滤波中的应用
雷振达,马春草
(江苏自动化研究所,江苏 连云港 222061)
反舰导弹具有飞行速度高、进入目标高度低和机动性强等特点,对反舰导弹跟踪滤波属于典型的非线性系统估计问题,对算法要求较高。粒子滤波器可以获得近似最优解,采用粒子滤波代替交互多模型跟踪算法中的扩展卡尔曼滤波,将粒子滤波与交互多模型的优点相结合,用于非线性非系统的高速高机动反舰导弹目标跟踪,比较扩展卡尔曼滤波而言,这种滤波器对不确定情况有更好的滤波性能。将这种滤波器应用到跟踪算法中,可以对非线性系统取得良好的滤波效果。MonteCarlo仿真结果表明在反舰导弹各种机动情况下跟踪滤波算法是有效的。
粒子滤波,交互多模型,非线性非高斯
0 引言
反舰导弹目标按射程可分为远、中、近程和末端等层次,末端机动的超音速反舰导弹速度快,过载大,留给火控系统的反应时间短,给准确拦截造成了很大的困难,因此,对反舰导弹跟踪滤波研究就有重要意义。在对诸如反舰导弹的高速高机动目标进行滤波跟踪,交互式多模型(Interacting Multiple Model,IMM)算法被认为是迄今为止最有效的算法之一,它通过对目标机动方式的多模型假设来实现“均衡”的跟踪[1-2],经典IMM算法以卡尔曼滤波器为子模型,其卡尔曼假设(线性状态空间模型、过程噪声)导致了应用的局限性。
在应用中,目标运动模型和测量模型是非线性的,噪声是非高斯的。由于各种影响的存在,也可能出现模型的不确定性,粒子滤波(Particle Filer,PF)的研究非常重要。随着计算机速度的提高和储存成本的下降,PF受到越来越多的关注[3-6]。为满足非线性、非高斯机动目标跟踪系统的要求,本文将PF引入IMM算法,构建了交互式多模型粒子滤波(In-teracting Multiple Model Particle Filtering,IMMPF)算法。相比基于扩展卡尔曼滤波IMM(IMMEKF)算法,在求解“非线性、非高斯噪声”系统目标跟踪问题时,IMMPF算法能够获得更好的状态估计效果。
1 反舰导弹三维矢量模型
高速高机动反舰导弹为了提高突防概率,大多数采用末端或全程超音速超低空掠海飞行,预设或者随机改变飞向高度,方位发射和蛇形机动等改变飞行方位,末端跃升俯冲等方式攻击水面舰艇的水线要害部位。现代反舰导弹跟踪处理弹道主要为机动段、比例导引段、跃升俯冲段等阶段。典型反舰导弹弹道如图1所示。

图1 反舰导弹典型弹道
2 IMMPF算法
针对多模型,状态转移方程和观测方程为:

式中xk表示k时刻模型mk的目标状态向量,zk表示对应的状态观测变量,状态转移矩阵F和过程噪声矩阵G以及观测矩阵H都与模型mk相关;过程噪声uk和观测噪声vk同样与模型mk相关,定义过程噪声和观测噪声概率密度分别为和。
假定系统模型mk∈M,数目有限,模型概率为μk(mk),模型之间的转移概率可以用Markov链表示:

pij表示k-1时刻模型mk-1转移到k时刻模型mk的概率,假定在跟踪过程中保持不变。
假设状态初值x0已知,初始模型概率,各时刻的观测值z1:k已知,估计该时刻状态的后验概率密度(xk|z1:k),进而得到系统状态估计值xk。
以IMM算法为基本框架,交互多模型粒子滤波(IMM-PF)采用PF作为模型匹配滤波器,按照IMM算法分为4个步骤:输入交互、模型匹配滤波、模型概率更新、估计输出。以IMM算法为基本框架,由递推贝叶斯滤波来推导由 k-1时刻到 k时刻的IMM-PF算法。
2.1 输入交互
首先,计算系统模型k-1时刻的交互概率:

归一化因子:

各模型中的粒子与其他模型的状态估计值进行交互运算(l=1,2,…,N):

2.2 模型匹配滤波
由状态转移方程(1)预测k时刻粒子状态:

由观测方程(2)预测k时刻粒子状态观测值:

再由系统状态观测值zk及观测噪声概率密度求得粒子权值为:

权值归一化:


2.3 模型概率更新
计算粒子观测值残差:

粒子观测值均值:

残差协方差为:

模型似然函数为:

更新模型概率:

其中,

2.4 估计输出
计算目标的状态估计值:

IMMPF算法的所有交互、滤波、估计和重采样都是建立在粒子的基础上。
3 仿真结果
通过Monte-Carlo仿真来验证算法的有效性。仿真次数为100次。算法采样周期Ts=0.1 s,算法模型集合由两个模型组成:两个“当前”统计模型和一个匀速模型,同时比较使用扩展卡尔曼滤波的标准IMM算法,对典型的反舰导弹比例导引机动和跃升俯冲机动进行跟踪滤波处理,反舰导弹弹道如图3所示,算法采用的马尔可夫转移概率矩阵均为:

反舰导弹目标初始位置为(25 000,0,300)m,速度为600 m/s,比例导引系数取4,粒子数M=500。“当前”统计模型初始协方差为diag(10-6×[400 100 25 400 100 25 400 400 25]),机动(加速度)时间常数的倒数α=0.1,最大机动加速度设为axmax=25 m/s2,a-xmax=-25 m/s2。过程噪声10 m/s2,观测噪声方差为50 m。
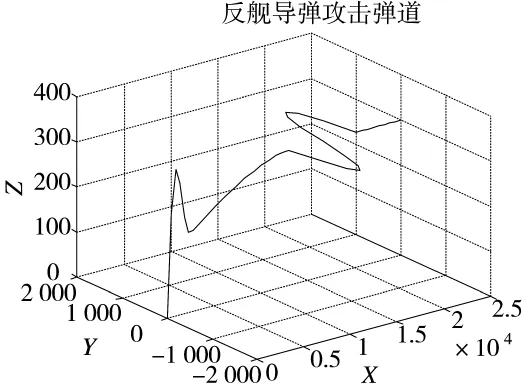
图3 反舰导弹弹道

图4 两种滤波算法对距离的跟踪结果比较

图5 两种滤波算法对速度跟踪结果比较
图4 和图5分别给出了本文提出的IMMPF算法比较IMMEKF算法在上面情况下的仿真结果,仿真主要对X-Z平面内反舰导弹比例导引机动段和跃升俯冲机动段进行处理。
两种滤波算法误差均方根统计如表1所示。

表1 两种滤波算法误差均方根统计
仿真结果表明两种算法的差别较大,说明反舰导弹目标发生比例导引机动和跃升俯冲机动机动时,基于IMMEKF算法会发生发散现象,而IMMPF滤波算法能很好地抑制发散。这是因为在反舰导弹发生剧烈机动时,基于IMMPF滤波算法可以更好地处理非线性非系统,使得算法对目标在强非线性时保持稳定的跟踪。仿真实验可以看出,IMMPF滤波算法比IMMEKF算法的平均误差和均方根误差都小,本文算法跟踪对非线性非系统跟踪性能更佳。
4 结论
针对非线性系统高速高机动反舰导弹目标跟踪问题,本文引入的IMMPF滤波算法更加稳定,精度更高,鲁棒性好,且不受噪声限制,易于实现,尤其是在强非线性系统中,优势更明显,适用于非线性运动模型、非线性测量模型及非高斯噪声的反舰导弹目标跟踪,具有良好的应用前景。
[1]Blom H A P,Bar-shalom Y.The Interacting Multiple Model Algorithm for Systems with Markovian Swithing Coefficients[J].IEEE Transactions on Automatic Control,1988,33(8): 780-783.
[2]Mazor E,Averbuch A,Bar-shalom Y,et al.Interacting Multiple Model Methods in Targer Tracking:A Survey[J].IEEE Transactions on Aerospace and Electronic Systems,1998,34(1):103-122.
[3]Gordon N J,Salmond D J.Novel Approach to Non-linear and Non-Gaussian Bayesian State Estimation[J].Proc of Institute Engineering,1993,140(2):107-113.
[4]SanjeevArulampalam M,Maskell S,Gordon N,et al.A Tutorial on Particle Filters for Online Nonlinear/Non-Gaussian Bayesian Tracking[J].IEEE Transactions on Signal Processing,2002,50(2):174-188.
[5]Zhao Y J,Pei H L.Object Tracking Based on Particle Filter with Discriminative Features[J].Control Theory Appl,2013,11(1):42-53.
[6] Li H,Zhang L.Chaotic Pulse Position Modulation Ultra-wideband System Based on Particle Filtering[J].High Technology Leters,2013,19(1):48-52.
Application of IMM Particle Filter in Anti-ship Missile Target Tracking Algorithm
LEI Zhen-da,MA Chun-cao
(Jiangsu Automation Research Institute,Lianyungang 222061,China)
According to high speed,low flying and high manuvering,typical nonlinear system estimation problem,Good Methods are needed in Anti-ship Missile Tracking Problems.Particle Filter(PF)is asymptotically optimal.A new tracking algorithm,replacing Extended Kalman Filter with GPF in Interacting Multiple model tracking algorithm integrates the advantages of PF with the ones of Interacting Multiple model l,is proposed in non-linear and non-Gaussian Anti-Missile tracking system. The new Filter which is well applied to maneuvering target tracking in non-linear and non-Gaussian system yields improved better performance in the case of uncertainties.The MonteCarlo simulation results indicate that the Anti-ship Missile tracking algorithm can maintain tracking under severe correlates maneuvers.
particle filtering,interacting multiple model,non-linear and non-Gaussian
TJ760.2;TP181
A
1002-0640(2015)06-0096-03
2014-04-19
2014-05-30
雷振达(1982- ),男,辽宁沈阳人,硕士。研究方向:火控系统数学模型。
