基于Pro/E与ADAMS的高空带电作业机器人的联合仿真
2015-06-12蔡长亮章书成李玉印
□ 蔡长亮 □ 章书成 □ 李玉印
内蒙古工业大学 机械学院 呼和浩特 010051
随着当今社会的快速发展,要求电力部门稳定、可靠地不间断发电,因此,为了适应当前供电需求,需要进行带电作业[1]。带电作业为提高供电可靠性、减少停电损失等作出了巨大贡献,得到电力企业以及社会的高度重视。但对于高空带电作业,例如,为防止输、变电站设备发生短路及污闪现象的发生,需对高空绝缘子进行定期的清扫作业,传统的人工清扫方法危险性高、劳动强度大、效率低,并且人工清扫需要“逢扫必停”,与不间断供电相违背[2]。因此,设计了一种高空带电作业机器人,旨在完全代替人工完成变电站高空带电绝缘子清扫等工作。
自上世纪90年代以来,国内外在攀爬机器人领域发展迅速,分为环抱式攀爬机器人、爪式攀爬机器人及夹持式攀爬机器人3种[3]。本文研制的高空带电作业机器人以爪式攀爬机器人为载体模型,利用Pro/E完成整机建模后,导入ADAMS软件中,仿真机器人在绝缘子上的运行情况,获取机器人质心在竖直方向上的振动加速度曲线及速度曲线,评价高空带电作业机器人运行时的平稳性。与此同时,验证了ADAMS软件在机械动力学仿真方面的突出性能表现。
1 总体结构设计
带电作业机器人整机主体模型主要包括驱动机构、传动机构、夹持机构(机械手爪)、导向机构、限位开关等,整个机体长约280 mm,宽约120 mm,高约 270 mm,总重约为4.5 kg。整机模型是在Pro/E中进行绘制并装配完成的,装配模型如图1所示。

▲图2 直线运动机构
1.1 直线运动机构方案的设计
考虑到高空带电作业机器人的工作环境、稳定性、机动性、可控性、外形尺寸及成本等[4],最终确定采用伺服电机驱动,齿轮齿条进行传动。伺服电机通过电机架固定在滑块上,电机架底端与连接板相连接,齿条固定在主板上,齿条两侧各安装1个导轨,导轨两端装有4个限位开关,用来限制滑块的移动距离,直线运动机构如图2所示。
该种方案的设计,充分利用了齿轮齿条的传动特点。结构上通过主板与连接板的交替循环移动,来带动整个机器人的直线运动。机构每循环移动一次,各主要部件的运动状态如表1所示。
1.2 行走机构的设计
机器人在高空沿绝缘子移动过程中,一方面,需要夹持机构(机械手爪)具备一定力封闭、形状不封闭的特点;另一方面,夹持机构要能够提供足够大的夹持力,以确保机器人在移动过程中不会跌落或滑移[2-4]。 机械手爪主要由电机、电机支座、齿轮、上臂、连杆、V字手爪组成,机械手爪的结构如图3所示。

▲图1 装配模型

表1 各主要部件运动状态
2 带电作业机器人的运动规律分析
2.1 直线运动机构速度计算
该直线运动机构中,齿轮齿数为24,模数为0.8 mm,齿条长度为150 mm,预设伺服电机转速为50 r/min,齿条移动的速度v为:

其中:d为齿轮分度圆直径,mm,d=mz=19.20 mm;n为齿轮转速。
2.2 ADAMS仿真
为了更好地研究高空带电作业机器人的运动规律,利用Pro/E在原有的机器人三维模型中构建了硅橡胶绝缘子模型,仿真时,使机器人在绝缘子上行走。
仿真模型是将Pro/E中的模型进行简化后,保存为 x_t格式文件,导入 ADAMS中[5],仿真模型如图 4所示。在ADAMS中设置相应的仿真环境 (重力加速度、计量单位等),对各个构件添加预设的材料属性,并在构件之间添加相应的运动副[6],包括铰副、固定副、移动副等。最后,添加motion驱动,利用里面的Step(TIME,t0,y0,t1,y1)函数定义伺服电机的角速度、机械手爪的角速度(本文忽略不提)。
2.2.1 直线运动机构速度仿真分析
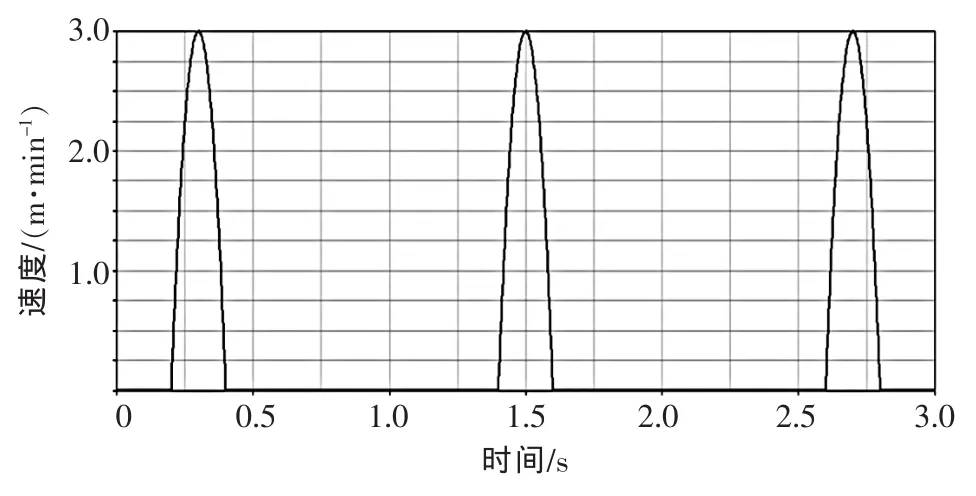
▲图5 主板速度时间曲线

▲图3 机械手爪的结构

▲图4 仿真模型
进行动力学仿真时,单位时间内仿真步数与步长成反比,且步长越大,仿真效果越逼真明显,但仿真计算时间相应的也越长[7],因此,本次仿真设置步数为1 500,时间为3.0 s。根据预设方案(表1),在伺服电机上添加具体驱动函数值为:STEP(time,0.2,0,0.4,60d )+STEP(time,0.8,0,1.0,-60d )+STEP(time,1.4,0,1.6,60d )+STEP(time,2.0,0,2.2,-60d)+STEP(time,2.6,0,2.8,60d),仿真完成后得到主板与连接板的速度时间曲线如图5、6所示。
分析上述曲线可以看出:在一个运动周期内,主板的最大速度为3.14 m/min,与理论值3.01 m/min相比较,误差为4.31%;连接板的最大速度为3.09 m/min,与理论值3.01 m/min相比较,误差为2.66%,满足设计方案要求。
2.2.2 直线运动机构加速度仿真分析
为了更好地分析带电作业机器人在绝缘子上行走的平顺性,利用ADAMS仿真得到机器人质心在竖直方向的振动加速度曲线,为了便于比较分析,将机器人质心在竖直方向上的振动加速度分解成主板质心在竖直方向上的振动加速度与连接板质心在竖直方向上的振动加速度,加速度随时间变化曲线如图7、8所示。
分析上述曲线可以看出:机器人在绝缘子上运行时, 0.4~0.8 s、1.0~1.4 s、1.6~1.8 s、2.2~2.4 s 这四个时间段,主板与连接板是静止的,加速度为零,这是由于在此过程中,机械手爪I与机械手爪II在交替张开与闭合。机器人在作直线运动时,主板与连接板质心在竖直方向上的振动加速度范围分别是-6.31~6.47 m/s2与-6.43~6.95 m/s2,通过计算,机器人质心在竖直方向上的振动加速度均值为0.53 m/s2。
3 结论

▲图6 连接板速度时间曲线
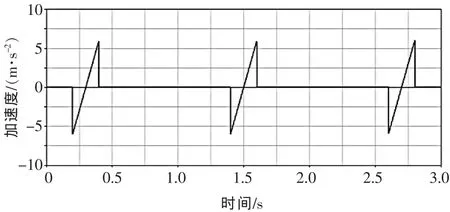
▲图7 主板质心在竖直方向上的振动加速度时间曲线
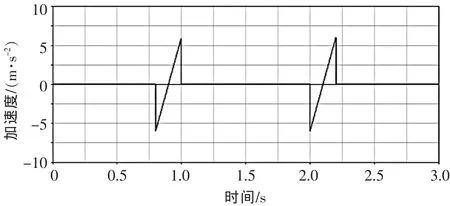
▲图8 连接板质心在竖直方向上的振动加速度时间曲线
本文运用三维绘图软件Pro/E建立了高空带电作业机器人结构模型,对直线运动机构速度进行了计算,在机械动力学仿真软件ADAMS中建立了仿真模型并进行了仿真分析,获得了机器人在硅橡胶绝缘子上行走时主板与连接板的速度时间曲线、主板与连接板在竖直方向上的振动加速度时间曲线。仿真结果一方面体现了ADAMS在机械动力学仿真方面的优点,另一方面验证了高空带电作业机器人在硅橡胶绝缘子上行走较平稳、可靠。研究结果一方面可用于高空带电作业机器人的优化和改进设计,另一方面对提高带电作业效率、减小劳动强度等具有指导意义[3]。
[1] 李健,鲁守银,王振利,等.220 kV变电站带电作业机器人的研制[J].制造业自动化,2013(9):76-79.
[2] 陆小龙,赵世平,廖俊必,等.电力铁塔攀爬机器人加持机构设计与分析[J].四川大学学报,2010(11):239-250.
[3] 何富君,李浩,张瑞杰,等.储罐爬壁机器人的喷漆机构设计及 ADAMS 仿真[J].制造业自动化,2013(11):107-110.
[4] 鲁守银,马培荪,戚晖.高压带电作业机器人的研制[J].电力系统自动化,2003(10):56-58.
[5] 王洪光,姜勇,房立金,等.双足爬壁机器人壁面凹过渡步态规划研究[J].智能系统学报,2007(4):40-45.
[6] 张静,许东来.ADAMS在并联机构运动学分析中的应用[J].机电工程,2010(9):57-60.
[7] 焦晓娟,张湝渭,彭斌彬.RecurDyn多体系统优化仿真技术[M].北京:清华大学出版社,2010.
