模块化可穿戴外骨骼上肢机器人的结构设计与分析
2015-06-12吴小辉喻洪流
□ 吴小辉 □ 薛 卉 □ 黄 蓉 □ 乐 珺 □ 胡 鑫 □ 喻洪流
1.上海电气集团股份有限公司 中央研究院 上海 200070
2.上海理工大学 康复工程与技术研究所 上海 200093
目前,各类脑血管病已成为危害我国公民身体健康和生命的主要疾病之一,约有75%的脑血管病人患有不同程度的上肢功能障碍。依靠康复医师对患者进行传统的一对一手工操作和主观临床经验对康复状况进行评估的方式,存在着医生工作强度大、效率低、依赖医师经验、患者被动接受治疗、参与治疗主动性不足等问题,限制了康复水平的提高。此外,各种高强度重体力劳动也严重危害着人们的健康状况。基于人机智能技术,结合康复技术、肌电信号处理技术与机器人技术的模块化可穿戴外骨骼机器人,为优化脑血管病患者的康复治疗方法、改善高强度重体力劳动状况提供了一个很好的契机[1]。它不仅可以减轻医生的工作强度,改善康复效果,还可以显著改善重体力劳动者的健康状况,降低工伤事故,在工业、农业、交通运输、医疗、服务业等领域有着极为广泛的应用前景。
1 方案设计
人机智能技术的本质是将人-机器系统看作一个整体,人与机器各自执行自己最擅长的工作,二者共同认知、共同感知、共同决策、共同工作,从而突破传统的人工智能系统的概念,形成达到甚至超过人的能力乃至智力的“超智能系统”[2]。基于此,在人体上肢生理特征的基础上,通过对比几种典型的上肢康复训练机器人系统机构模型,进行了模块化可穿戴外骨骼上肢机器人的结构设计。
1.1 人体上肢生理特征

▲图1 人体上肢生理特征图
图1 所示为人体上肢生理特征,肩关节由肱骨头和肩胛骨等构成,通过三角肌、胸大肌等肌肉的收缩/舒张,实现上臂的屈/伸、内收/外展、旋内/旋外运动。肘关节由肱尺关节、肱挠关节和挠尺近侧关节构成,通过肱二头肌、肱三头肌等肌肉的收缩/舒张,实现前臂的屈伸以及旋前/旋后运动。人体上肢各关节运动范围见表1。
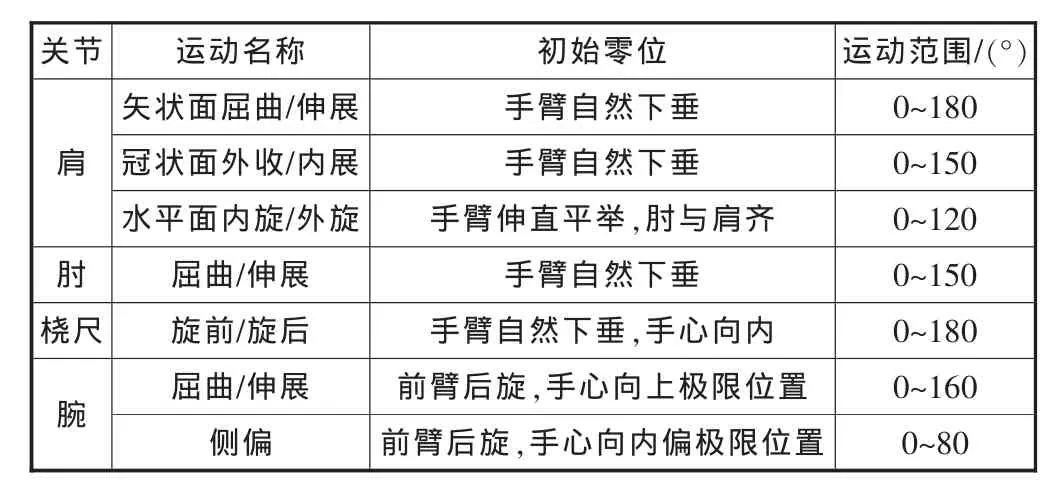
表1 手臂主要活动关节运动范围

▲图2 3种常见的上肢康复训练机器人系统机构模型图
1.2 构型选择
人体外骨骼是一种可以让人穿戴的人机一体化机械装置,能够提供对人体柔软内部器官进行构型、建筑和保护的外部结构[3],在医学上,用来帮助伤残人士进行功能替代或康复,是现在研究的热点。图2所示的是3种常见的上肢康复训练机器人系统机构模型[4]。
图2(a)是末端执行式康复机器人的机构模型,通过机器人的操作末端牵引人体上肢进行运动,虽然操作末端的运动域完全涵盖上肢的运动范围,但机器人的关节与人体关节无直接关系。该类系统一般通过牵引手或腕部来完成上肢的运动,安装使用方便,但使用时上肢各关节位姿通常是不确定的,牵引力无法精确地施加于上肢各关节,牵引过度时容易对上肢造成伤害[4]。 这类机器人中较典型的有 MIT-MANUS、MIME 和iPAM。
图2(b)是支架外骨骼式康复机器人机构模型,其部分机械结构可固定在人体上肢上,与肢体进行耦合运动,机器人在人体后部固定于支架上。该类系统对上肢的手、前臂、上臂等各部位进行支撑和牵引,牵引力精确地施加于上肢的各关节,使用时上肢各关节的位姿状态是确定的。然而,患者使用这种机器人必须在固定的支架上或者椅子附近进行康复训练,限制了患者的运动范围,不能辅助患者进行日常生活训练,这类机器人中较典型的有ARMin、CADEN-7 和 ArmeoSpring等,哈尔滨工业大学机器人研究所的5DOF穿戴式上肢康复机器人也属于这一类型的机器人。
图2(c)是穿戴外骨骼式康复机器人机构模型,如 HAL-5、Arm Robot,机器人本体机构穿戴在人体上,并通过其它肢体模块将加载在人体的机器人质量转移至地面,这样不仅保证了机器人的运动域涵盖人体上肢的运动范围,而且机器人关节通过仿生人体关节来设计。这种机器人不限制患者的运动范围,能够辅助患者进行日常生活训练,是目前最理想的康复训练与助力设备。
通过对比三种典型的上肢康复训练机器人可知,穿戴外骨骼式康复机器人相对于其它两种机器人具有明显的优势,目前日本筑波大学山海嘉之和三阶吉行教授研制的穿戴外骨骼式半机器人套装HAL-5已经实现商业化应用,然而高昂的成本限制了其应用范围。为便于该技术的推广使用,需要采取技术手段在实现功能的前提下降低其成本。
2 结构设计
肩-肘关节是人体上肢主要运动关节,主要有肩关节的屈/伸、内收/外展、旋内/旋外、肘关节的屈伸以及旋前/旋后,共7个自由度。其中,肩关节的屈/伸、内收/外展、肘关节的屈伸是主要的运动自由度,基于此设计了图3所示的模块化可穿戴外骨骼机器人。
该机器人由背部模块、肩关节模块和肘关节模块三部分构成,肩关节模块通过柔索传动的形式实现关节的屈/伸、内收/外展运动,内侧用来固定肌电信号传感器;肘关节模块通过柔索传动的形式实现屈伸运动;背部模块可固定电机、减速器、驱动器、电池以及通信控制模块等,肩-肘关节之间用一个可调长度的机构相互连接,以适应各种上臂长度不同的人。
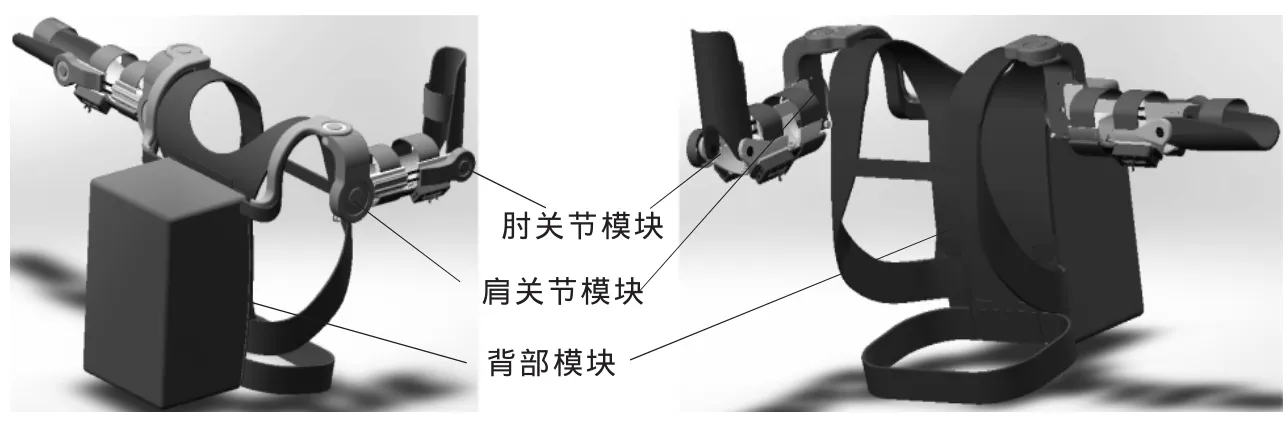
▲图3 模块化可穿戴外骨骼上肢机器人三维模型图

▲图4 肩关节模块三维模型图
▲图5 肘关节模块三维模型图
▲图6 外骨骼机器人在人体工程学模型上的验证

▲图7 外骨骼上肢机器人坐标系定义
图4 所示为肩关节模块传动机构,由电机驱动的传动轮1来调节1号和2号柔索的伸出长度,进而带动肩关节作水平面内的转动,当1号柔索缩短、2号柔索伸长时,肩关节逆时针转动,对应水平面的内收动作;反之则顺时针转动,对应水平面的外展动作。同理,通过电机驱动的矢转盘来调节3号和4号柔索的伸出长度,进而带动上臂板作矢状面内的转动,当3号柔索缩短、4号柔索伸长时,传动臂逆时针转动,对应矢状面的屈;反之则顺时针转动,对应矢状面的伸。通过水平面运动和矢状面运动的复合,可以完成冠状面的内收/外展动作。
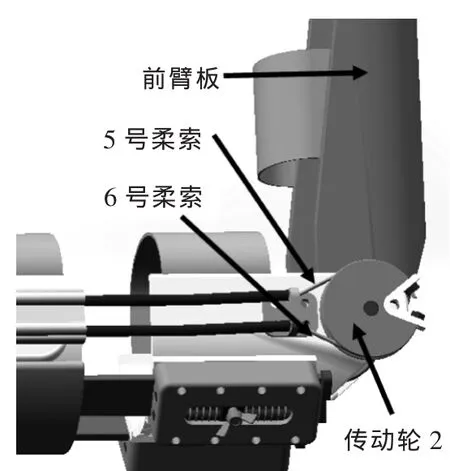
图5所示为肘关节模块传动机构,由电机驱动的传动轮2来调节5号和6号柔索的伸出长度,进而带动前臂托作水平面内的转动,当5号柔索缩短、6号柔索伸长时,前臂板逆时针转动,对应肘关节的屈;反之则顺时针转动,对应肘关节的伸。
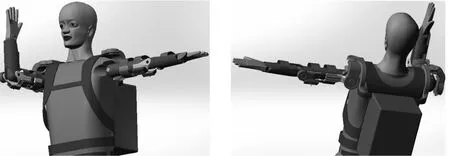
外骨骼应能充分适应人体上肢的运动,在设计过程中,需要充分贯彻“拟人化”的设计原则[5]。为此将机器人在人体工程学模型上进行了验证,如图6所示,穿戴上机器人的标准人体模型的各部分肢体能够顺滑地随着外骨骼一起进行耦合运动,肩、肘关节两端的机构长度可调整,以此适应手臂长度不同的人。
3 运动学分析
机器人运动学分析包括运动学正解和运动学反解。运动学正解是在机器人各自由度运动已知的情况下,求机器人末端的位姿;而运动学反解则恰好相反,是在机器人末端位姿已知的情况下,求各自由度运动情况[6]。
外骨骼上肢机器人可简化为一个由定位板、肩拐板、上臂板、前臂板4个杆件组成的空间四连杆机构,3个转动副对应于机器人的3个自由度。人体上臂、前臂分别捆绑在机器人的上臂板、前臂板上,随着上臂板、前臂板进行耦合运动。
如图7所示,基于D-H(Denavit-Hartenberg)法建立了机器人运动的连杆坐标系,该坐标系确定了各连杆间的相对运动和位姿关系。坐标系O0-X0Y0Z0为全局坐标系,O4代表了机器人末端的运动。
表2是外骨骼上肢机器人各连杆的D-H参数,其中,杆长和扭角是固定不变的,用于描述连杆本身,偏置和转角描述相邻连杆的连接关系,偏置是固定的,转角θi是关节变量。由于运动范围比较小,假设肩关节和肘关节的转动中心点位置不变。
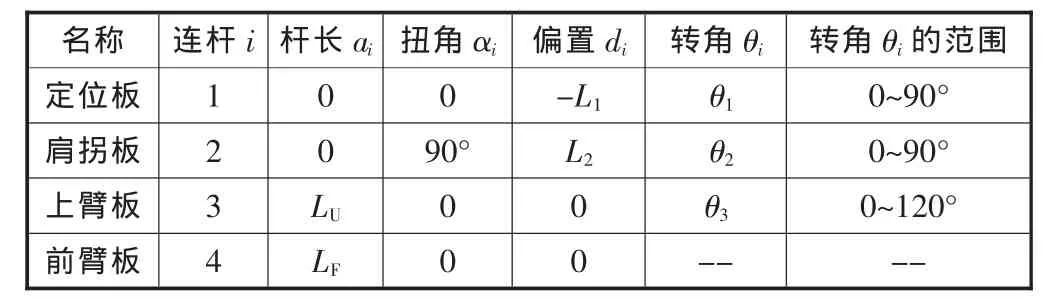
表2 外骨骼上肢机器人D-H参数表
表中,L1和L2分别为肩关节的转动中心到定位板和肩拐板的距离,LU和LF分别为机器人上臂板和前臂板的关节长度。相邻连杆间的相对位姿关系为:
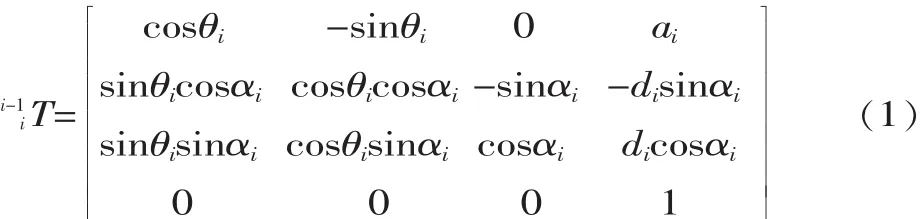
通过矩阵乘法建立机器人末端相对于全局坐标系的位姿,可以得到多连杆之间的变换,即机器人运动学的正解方程,即:


综合式(1)、式(2),可得:
n、o、a描述了机器人末端相对于全局坐标系的姿态,与3个关节变量有关,p描述了机器人末端在全局坐标系中的位置,与3个关节变量和机器人外形尺寸参数有关。

运动学的反解是根据机器人末端相对于全局坐标系的位姿来求解关节变量的值。此时n、o、a、p都是已知的,可结合式(3)和式(4)得出各关节变量。
根据 nx与 ny、px与 pz、nz与 oz的关系可分别求出θ1、θ2、θ3的值,式(5)~式(7)即为机器人的运动学反解方程。

4 机器人的运动域
如图8所示,笔者所设计的外骨骼上肢康复训练机器人可简化为空间连杆机构,机器人背部模块背负在患者背上,在上臂杆、前臂杆处分别与患者的上臂和前臂绑缚在一起,带动患肢进行耦合运动。机器人的运动域是人体上肢的运动域的真子集,从而可在不超出人体上肢运动范围的情况下,带动患肢运动到运动域空间中的任一位置,同时保证患者肢体的安全。

▲图8 患者患肢和机械臂的运动域
该外骨骼上肢康复训练机器人训练的主要是患者上肢的肩关节和肘关节,主要训练动作为:矢状面内抬臂、曲肘,水平面内旋、外旋,冠状面外展、内收,以及由这些基本动作所组合的其它动作,同时可使患者在机器人的辅助下完成进食、喝水、开门、取物等动作,逐步恢复生活自理能力。
肩关节可进行水平面、矢状面、冠状面内的训练,上臂的最大活动范围为:矢状面的0~90°屈曲/伸展,水平面的 0~90°内旋/外旋, 冠状面的 0~90°外展/内收。肘关节主要以屈、伸运动训练为主,前臂的最大活动范围为与上臂的夹角从 0~120°。
5 前景展望
在健康领域,外骨骼机器人不仅仅是向患者提供机械肢体,还需要通过合理的控制方法和康复模式,辅助患者进行康复训练与康复运动[7]。对比传统的人工辅助康复训练方式,新型外骨骼机器人可以将治疗师从繁重的体力和精神负担中解脱出来,满足残障者对生活辅助的时间和强度的要求,同时记录的数据可为评价康复效果、实时调整康复方案及康复工程的深入研究提供客观依据。通过成熟产品的推广应用,最终将使广大患者受益,进而改善人们的健康状况与生活品质。
[1] 王东岩,李庆玲,杜志江,等.5DOF穿戴式上肢康复机器人控制方法研究 [J].哈尔滨工业大学学报,2007,37(9):1383-1387.
[2] 杨灿军,陈鹰,路甬祥.人机一体化智能系统理论及应用研究探索[J].机械工程学报,2000,36(6):42-47.
[3] 李庆玲,孙立宁,杜志江.上肢康复机器人发展现状的分析与研究[J].机械设计,2008,25(9):1-3.
[4] André Schiele.Fundamentals of Ergonomic Exoskeleton Robots[D].Delft:Technische Universiteit Delft,2008.
[5] A Gupta , M K O’Malley.Design of a Haptic Arm Exoskeleton for Training and Rehabilitation[J].IEEE/ASME Transactions on Mechatronics,2006,11(3):280–289.
[6] 吕广明,孙立宁,彭龙刚.康复机器人技术发展现状及关键技术分析 [J].哈尔滨工业大学学报,2004,36(9):1224-1231.
[7] Haiwei Dong,Izaskun Ugalde, Nadia Fiqueroa,et al.Towards Whole Body Fatigue Assessment of Human Movement:A Fatigue-Tracking System BasedonCombinedsEMG andAccelerometer Signals [J] .Sensors ,2014,14(2):2052-2070.
