基于空间变形梁的柔性机械臂刚-柔耦合动力学模型研究
2015-06-07罗天洪黄世福董绍江
罗天洪,黄世福,陈 才,刘 淼,董绍江
(重庆交通大学 机电与车辆工程学院,重庆400074)
基于空间变形梁的柔性机械臂刚-柔耦合动力学模型研究
罗天洪,黄世福,陈 才,刘 淼,董绍江
(重庆交通大学 机电与车辆工程学院,重庆400074)
针对作大范围空间运动的机械臂,提出了基于变形旋量理论的工业机器人机械臂刚柔耦合动力学建模方法;研究了机械臂空间变形耦合和扭转变形对动力学特性的影响;建立了作大范围空间运动柔性机械臂的刚-柔耦合动力学理论模型,该模型将机械臂应用到空间范围,并考虑扭转变形的影响。对模型做计算仿真分析,将分析结果与传统零次模型进行比较。结果表明:作大范围运动机械臂动力学方程的建立,旋量理论的应用解决了传统数学方法只限于平面运动的局限性;大范围运动与机械臂变形之间的耦合,对于机械臂杆件和终端有一定的影响;计及变形耦合影响的机械臂动力学特性将发生变化,机械臂振动频率会提高。
机电工程;旋量理论;柔性机械臂;刚柔耦合;动力学模型
0 引 言
近年来,随着世界工业技术的发展,工业机器人向着轻质、重载、高精密方向快速发展,柔性机械臂也得到广泛的应用。柔性机械臂的动力学模型属于刚-柔耦合动力学模型,传统的零次建模理论[1-3]是将柔性臂简化为Euler-Bernoulli梁的方式进行建模,没有考虑作大范围运动与机械臂柔性变形之间的耦合作用,因此动力刚化现象的基础上,围绕作大范围运动机械臂的刚-柔耦合动力学模型,许多学者又进行了研究。韩清鹏等[4]建立了刚-柔混合两杆机械臂的动力学方程,分别讨论了在大范围运动已知条件和未知条件下的机械臂动力学响应;刘锦阳等[5-6]考虑纵向变形与轴向伸长量关系式中的二次耦合项,研究了柔性梁的刚-柔耦合问题,并对快速展开的空间机械臂进行了动力学建模;J.Martins等[7]对单一柔性关节的机械臂建立了数学模型,通过考虑离心力刚化问题减少了非线性动力的影响。孔向东等[8]从弹性变形的几何非线性关系出发,考虑了柔体系统中机械臂在刚弹耦合作用下横向弯曲变形产生的附加拉压应变引起的几何非线性问题;邓峰岩等[9]在柔性梁的纵向、横向变形中均考虑了横向弯曲变形的二次耦合项,对一双连杆柔性机械臂建立了耦合动力学方程。这些方法为一次耦合动力学建模方法以及考虑了变形耦合对纵向和横向同时影响,但均是将机械臂简化为平面柔性梁的模型进行建模分析,而将柔性机械臂置于空间范围的耦合模型鲜有研究。
笔者将变形旋量理论运用于机械臂刚柔耦合动力学的分析中,将机械臂简化为空间柔性梁,考虑其作大范围的空间运动,采用一致质量有限元法对梁进行离散,在此基础上,考虑机械臂大范围运动与变形的相互耦合作用,建立耦合动力学方程,并进行数值仿真,分析了与传统方法的差异。该分析方法可拓展到多连杆的机械臂,更好的揭示了作大范围空间运动柔性机械臂的动力学特性。
1 作大范围空间运动柔性梁的变形及运动学分析
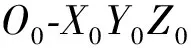
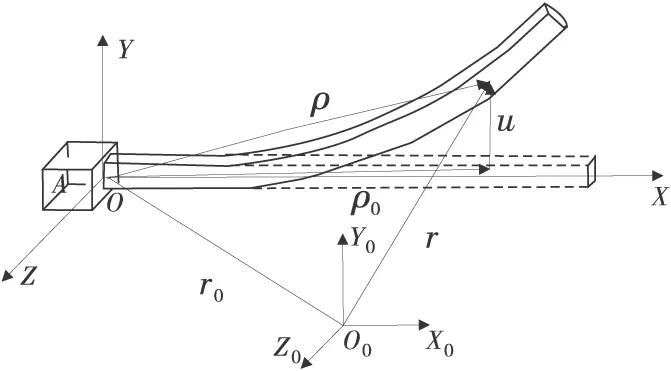
图1 作大范围空间运动的柔性梁
根据变形旋量理论[10],柔性梁在任意点k处的变形旋量可以表示为:
(1)

(2)
(3)
(4)
式中:υx,υy,υz为与k对应的梁中心轴上任意一点在局部坐标系x,y,z方向的变形位移。
利用一致质量有限元法对柔性梁进行离散,设N1,N2,N3为形函数阵,q为独立的总体变形位移阵,得:
υx=N1q,υy=N2q,υz=N3q
(5)
将式(5)代入式(2)~式(4),可得到:
(6)
式中:
(7)
(8)

设A为局部坐标系相对于惯性坐标系的旋转矩阵,由图1可得:
(9)

式(9)对时间t求导,得任意一点k在惯性坐标系下的速度为:
(10)
式中:θ为局部坐标系相对惯性坐标系的转角。
对于作大范围空间运动的柔性梁,在考虑弯曲变形的同时,还需要考虑扭转变形对空间梁的影响,即可用式(1)中的φ来表示,扭转变形可利用Rayleigh-Ritz近似函数的形式表达[9]:
(11)
2 作大范围空间运动柔性机械臂刚-柔耦合动力学分析
2.1 系统模型的描述
作大范围空间运动柔性机械臂的模型如图2,机械臂由C1,C2,C3三部分组成,杆件C1的局部坐标系与惯性坐标系重合,三连杆的长度分别为L1,L2,L3,机械臂在空间范围内运动过程中,3根柔性臂产生柔性变形,与3个刚性关节产生刚柔耦合的作用,三连杆所摆动的角度分别为θ1,θ2,θ3,质量为M1,M2,M3,连接柔性臂的3个关节的驱动力矩分别为τ1,τ2,τ3。
图2 作大范围空间运动柔性机械臂模型
2.2 机械臂刚柔耦合动力学方程的建立
根据式(9)和式(10),机械臂第i杆上任一点的矢量以及速度在惯性坐标系中可以有式(12)、式(13)表示:
(12)
(13)
因此该柔性机械臂的动能可以表示为:
(14)
式中:Mi是无限小的梁单元的质量矩阵。
根据图2机械臂系统模型,分别分析杆件C1,C2,C3所产生的动能,由于C1杆的局部坐标系与惯性坐标系重合,因此r01=0,旋转矩阵A1为:
(15)

(16)

(17)
根据式(1)和式(11),柔性机械臂的势能可以表示为:
(18)
因此,Lagrange函数为:
(19)
根据Lagrange方程
(20)
将式(19)代入式(20)中,可得到该柔性机械臂刚-柔耦合动力学方程

(21)
式中:M是系统惯性矩阵;B是系统广义速度耦合项;K是系统广义刚度矩阵;Q是广义力矩阵。
式中:τi是关节驱动力矩;Wi为广义外力。
3 仿真分析
取柔性机械臂的各参数为:机械臂臂长L1=L2=L3=3m,密度ρ=2.7×103kg/m3,弹性模量E=6.895×1010Pa,截面面积为S=8×10-4m2,惯量矩阵Iyy=3.2×10-7m4,Izz=3.2×10-7m4,3个关节驱动力矩为:
τ1=215sin3(2πt)+62
τ2=125sin3(2πt)+40
τ3=75sin3(2πt)+15
柔性机械臂初始状态为图2所示的位置,分别用此耦合动力学模型和传统的零次模型,采用悬臂梁形式的边界条件,根据前两节所得理论结果及模型,编制VB语言程序,进行数值仿真,比较了其刚性转角,C1,C2机械臂一阶振动模态随时间的变化,以及终端机械臂的y,z方向的变形位移,如图3~图5,其中虚线表示传统的零次模型,实线表示该耦合动力学模型。
由图3可见,本文的模型对机械臂两根连杆有一定的影响,而对于末端杆件影响更大,因此该模型说明多连杆机械臂的动力分析有必要考虑大范围运动和杆件变形之间的耦合作用。
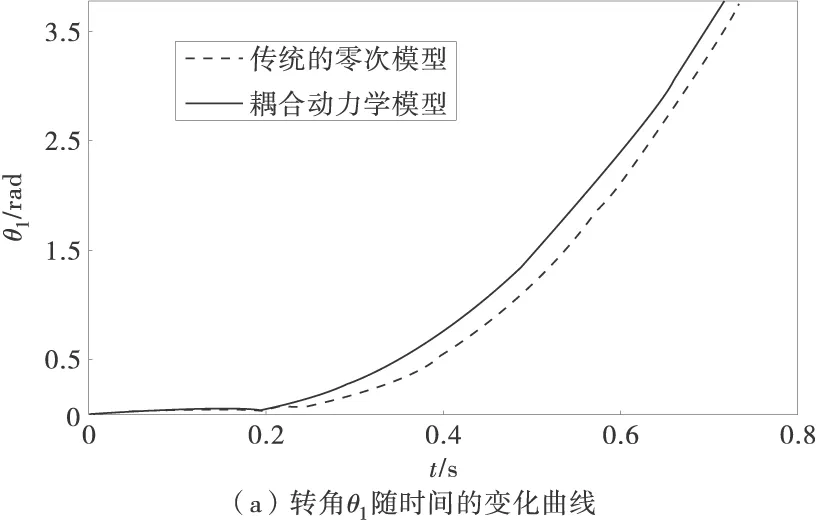

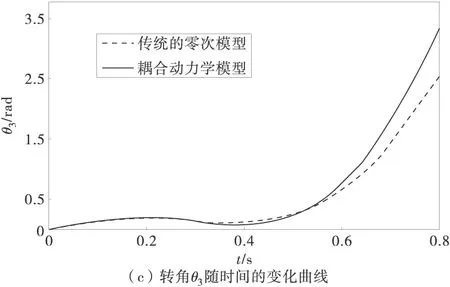
图3 转角θ1,θ2,θ3随时间的变化曲线
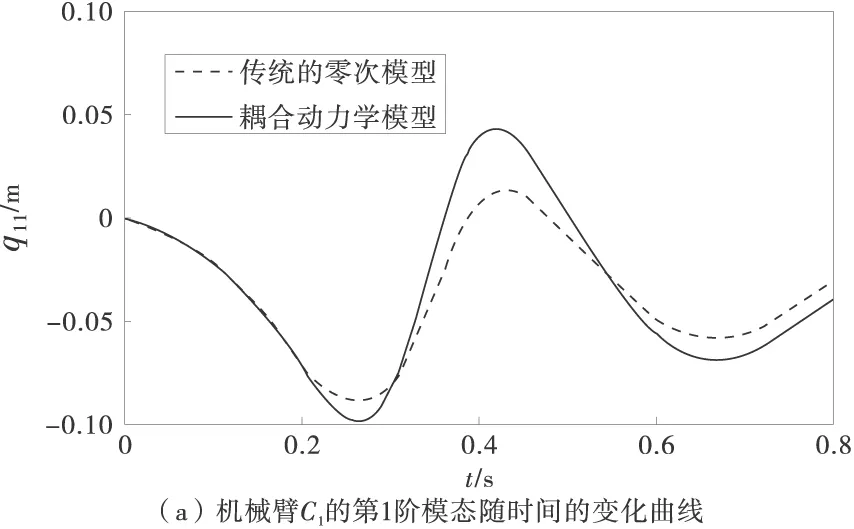
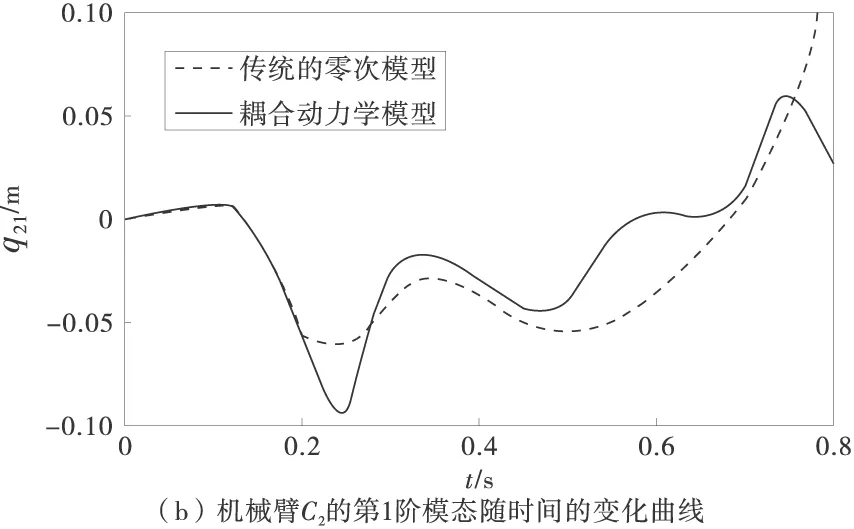
图4 机械臂C1,C2的第1阶模态随时间的变化曲线
图4可以看出,大范围运动与变形产生的变形耦合对机械臂两杆件振动特性的影响,运动和变形的耦合使得机械臂的频率提高。对于末端机械臂A3,图5描述了其端点的变形位移,可以看出此模型相比于传统模型有了误差,在柔性机械臂考虑空间运动的影响下,扭转变形也会对系统的动力学特性产生较大影响。
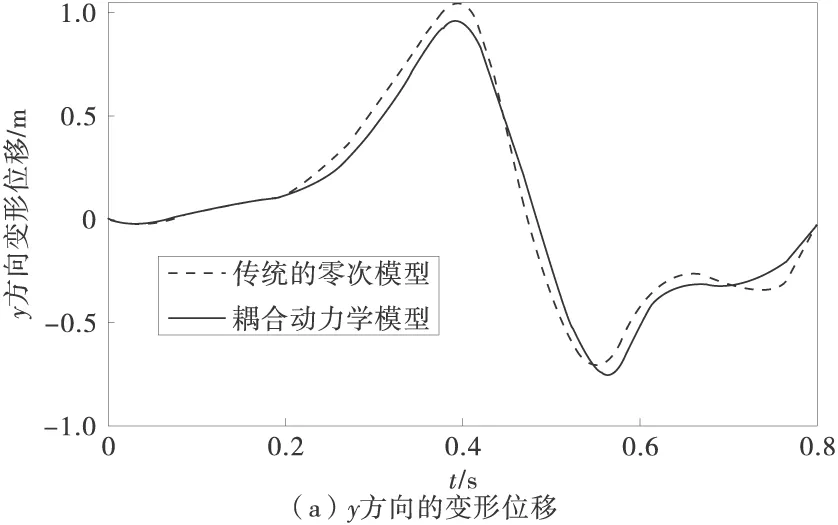
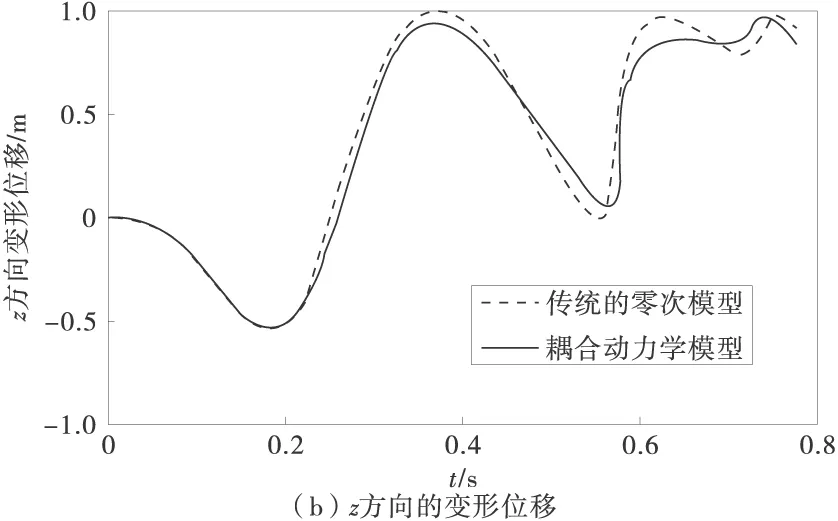
图5 机械臂C3端点y,z方向的变形位移
通过以上分析,柔性机械臂作大范围运动和杆件变形之间的耦合效应,对机械臂末端及频率有着更大的影响。对于机械臂振动的抑制,空间位置控制以及轨迹规划方面的研究,该模型都具有很大的理论指导意义。
4 结 论
旋量理论主要用于集中参数模型的刚体系统的运动学分析以及动力学,笔者将旋量理论扩展应用到作大范围空间运动的柔性机械臂刚柔耦合动力学模型分析中,结合变形旋量,计及大范围运动和杆件变形之间耦合效应以及变形耦合,并考虑了扭转变形的影响,在对机械臂系统动能和势能分析的基础上,建立了刚-柔耦合动力学方程,最后进行了数值仿真分析,得到以下结论:
1)旋量以及变形旋量的应用,拓展了机械臂动力学研究的空间应用范围,此方法考虑了机械臂空间各方位的变化以及扭转变形的影响,体现了刚-柔耦合效应,更有利于研究作大范围运动的机械臂。
2)机械臂大范围运动与变形的耦合效应,会影响机械臂的振动特性,提高机械臂的频率,对于末端执行构件的影响更大。传统模型不能准确反映其特性,该模型丰富了作大范围运动的柔性机械臂的建模理论。
[1] 贠今天,王树新,郭福新,等.计及环境特征的刚-柔机械臂动力学建模方法与理论研究[J].机器人,2004,26(5):448-453. Yun Jintian,Wang Shuxin,Guo Fuxin,et al.Study on the dynamics modeling method and theory of rigid-flexible arm in consideration of environmental characteristics [J].Robot,2004,26(5):448-453.
[2] 王磊,王三民,牛治永.空间RRRP机械臂的刚柔耦合非线性动力学特性研究[J].振动与冲击,2009,28(7):169-174. Wang Lei,Wang Sanmin,Niu Zhiyong.Nonlinear dynamical behavior analysis of a spatial rigid-flexible coupled RRRP-manipulator [J].Journal of Vibration and Shock,2009,28(7):169-174.
[3] Gouliaev V I,Zavrazhina T V.Dynamics of a flexible multi-link cosmic robot-manipulator [J].Journal of Sound and Vibration,2001,243(4):641-657.
[4] 韩清鹏,高培鑫.大范围运动条件下的刚柔混合机械臂动力学分析[J].机械设计,2013,30(2):27-31. Han Qingpeng,Gao Peixin.Dynamic analysis of rigid-flexible manipulators undergoing a large overall motion condition [J].Journal of Machine Design,2013,30(2):27-31.
[5] 刘锦阳,洪嘉振.刚-柔耦合动力学系统的建模理论研究[J].力学学报,2002,34(3):408-415. Liu Jinyang,Hong Jiazhen.Study on modeling theory of rigid-flexible coupling dynamic system [J].Acta Mechenica Sinica,2002,34(3):408-415.
[6] 刘锦阳,洪嘉振.空间机械臂的刚-柔耦合动力学研究[J].宇航学报,2002,23(2):23-27. Liu Jinyang,Hong Jiazhen.Study on rigid-flexible coupling dynamics of space-based manipulator [J].Journal of Astronautics,2002,23(2):23-27.
[7] Martins J,Botto M A,Costa J S D.Modeling of flexible beams for robotic manipulators [J].Multibody System Dynamics,2002(7):79-100.
[8] 孔向东,钟万勰,齐朝晖.计及动力刚化项的柔性机械臂几何非线性模型[J].机械科学与技术,1998,17(5):722-724. Kong Xiangdong,Zhong Wanxie,Qi Zhaohui.Geometric nonlinear model of flexible manipulators in consideration of dynamic stiffening terms [J].Mechanical Science and Technology,1998,17(5):722-724.
[9] 邓峰岩,和兴锁,李亮,等.计及变形耦合的双连杆柔性机械臂动力学模型[J].机械工程学报,2006,42(增刊1):69-73. Deng Fengyan,He Xingsuo,Li Liang,et al.Dynamic model of two-link flexible manipulator in consideration of coupling deformation terms [J].Chinese Journal of Mechanical Engineering,2006,42(Sup1):69-73.
[10] 丁希仑,J.M.塞里格.空间弹性变形梁动力学的旋量系统理论方法[J].应用数学和力学,2010,31(9):1118-1132. Ding Xilun,Selig J M.Screw theoretic view on dynamics of spatially compliant beam [J].Applied Mathematics and Mechanics,2010,31(9):1118-1132.
Flexible Manipulator Rigid-Flexible Coupling Dynamic Model Based on Spatial Deformation Beam
Luo Tianhong, Huang Shifu, Chen Cai, Liu Miao, Dong Shaojiang
(School of Mechanical-Electrical & Automotive Engineering, Chongqing Jiaotong University, Chongqing 400074)
Aiming at the manipulator which did spatial motion in a large range, a rigid-flexible coupling dynamic modeling approach of the industrial robot manipulator based on deformation screw theory was proposed, and the influence of robotic spatial deformation coupling and torsional deformation on the dynamic characteristics was researched. The rigid-flexible coupling dynamic theory model of flexible manipulator in a wide range of spatial motion was established, and the model applied manipulator to the spatial extent. Considering the influence of torsional deformation, the calculation simulation analysis on the model was carried out and the analysis results were compared with those of the traditional zero order model. The results indicate that the establishment of large range motion manipulator dynamics equation and the application of screw theory solve the limitations that traditional mathematical methods are limited to planar motion; the coupling between large range motion and manipulator deformation has an impact on the manipulator rod and terminal; considering deformation coupling, the manipulator dynamics characteristics will change and the manipulator vibration frequency will increase.
electromechanical engineering; screw theory; flexible manipulator; rigid-flexible coupling; dynamics model
10.3969/j.issn.1674-0696.2015.04.35
2014-05-03;
2015-04-02
国家自然科学基金项目(51375519)
罗天洪(1975—),男,四川资阳人,教授,博士后,主要从事机电液多领域仿真、数字化设计与分析方面的研究。E-mail:tianhong.luo@163.com。
TH113
A
1674-0696(2015)04-176-05
