电驱动桥大客车电子差速系统模糊PID控制
2015-06-07倪赟磊
何 仁,倪赟磊
(江苏大学 汽车与交通工程学院,江苏 镇江 212013)
电驱动桥大客车电子差速系统模糊PID控制
何 仁,倪赟磊
(江苏大学 汽车与交通工程学院,江苏 镇江 212013)
研究了轮毂式电驱动桥大客车的差速控制策略,推导了恒转矩下驱动电机的驱动电流和对应驱动轮纵向速度的计算方法,提出了基于滑转率的模糊PID控制方法对电驱动桥大客车左右车轮单独转速协调控制,设计了模糊PID控制器,推导了差速时左右侧驱动轮滑转率计算方法,建立了控制系统的MATLAB/Simulink系统模型。仿真分析差速时车辆内外侧车轮滑转率变化曲线,该控制系统相应时间快,内外侧车轮滑转率均趋于理想值,与理论分析一致。
车辆工程;电驱动桥;差速;模糊控制;PID控制
0 引 言
随着汽车工业的迅速发展,汽车轮边驱动技术逐步开始完善,电驱动桥技术目前就是研究热点之一。电驱动桥上集成了两台电机,每台电机独立驱动车轮,同时电驱动桥舍弃了差速器等一系列机械传动部件,通过电子差速控制系统实现车辆的差速行驶[1]。
电子差速控制需要选用合理的差速控制方法,达到车辆能够在转向工况下稳定行驶。目前,国内对这方面的相关研究比较少,靳立强等[2]提出通过对驱动转矩控制模式以实现自适应差速;彭思仑[3]采用BP神经网络理论,通过模拟实际工况下获得不同车速和方向盘转角下的最佳转矩调节量,通过大量的仿真数据进行神经网络训练,实现不同情况下转矩调节量的预测,来拟合非线性控制系统函数;赵艳娥等[4]采用滑模变结构控制理论,选用常值滑模控制每个车轮的滑转率。
由于差速工况下车辆驱动系统时变性和非线性,基于数学模型的控制器很难实时适应这种变化,经典和现代控制理论设计的差速控制系统比较复杂。模糊控制无需被控对象的数学模型,具有不确定性和复杂性的优点,满足差速控制时变性的要求,但是模糊控制对误差相对较小的控制效果不如PID控制。笔者设计基于滑转率的模糊控制和PID控制相结合的控制算法,误差较大用模糊控制,误差较小用PID控制微调,分别对电驱动桥内外侧车轮控制,实现电驱动桥大客车的差速行驶。
1 电驱动桥大客车差速系统模型
电驱动桥大客车差速是指在轮胎在地面纵向线速度和轮心速度不协调,即车轮的滚动距离和实际车轮在地面行驶的路径长度不等,这将引起车轮的拖滑或者滑转,导致汽车不能正常行驶,轮胎拖滑会加大轮胎磨损[5]。
图1是电驱动桥大客车转向时的Aekermann模型,后桥为电驱动桥。该模型在车轮处于极限范围内、车身位刚体的条件下成立。为了避免车辆转向时产生拖滑或者滑转现象,必须保证车辆转向时电驱动桥的内外侧车轮作纯滚动运动[6]。
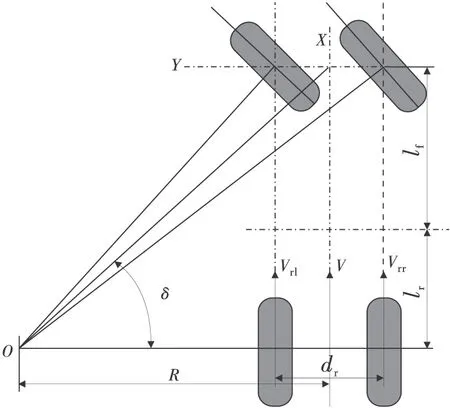
图1 Aekermann模型
从图1中可得:
(1)
(2)
式中:L为整车轴距;δ为车辆转向角;ω为绕O点转动的角速度;Ri为绕O点的转动半径;vi为纵向线速度。
把式(1)带入式(2),可以化简得到电驱动桥转向时左右车轮的纵向线速度与整车纵向速度的关系,分别为:
(3)
(4)
式中:v为整车纵向线速度;dr为车辆后桥轮距。
一般情况下,以车辆转向时驱动轮的滑转率来评判所设计的差速控制的好坏,其中滑转率s计算如式(5):
(5)
式中:ωi为驱动轮的角速度;ri为驱动轮的滚动半径;vi为驱动轮的轮心纵向线速度。
一般驱动轮理想的滑转率在0.05~0.15[7]。由于电驱动桥的内外侧车轮转速可调,即采取合理的调整方式,就可以保证驱动轮滑转率在理想的范围内。
2 电驱动桥控制策略
2.1 电机控制策略
电机的驱动性能参数功率、转速和转矩是由整车行驶条件决定的。某一辆满载的电驱动桥大客车在恒定车速下行驶时,假设车速恒定且路面坡度为0,单边电机所需的驱动功率可以由式(6)求得[8]:
(6)
式中:η为电机的效率;f为滚动阻力系数;A为有效迎风面积;CD为空气阻力系数;m为整车满载质量;N为驱动电机的台数。
电机的转速可以根据整车车速换算得到如式(7):
(7)
式中:v为整车车速;i为减速比;r为车轮滚动半径。
电机是通过其对应的电机控制器独立控制,电机两端的电压一般是高压配电柜直接连出,电压数值在一段时间内是接近电机额定电压的恒定值。电机控制器根据实时功率所需,控制电机的驱动电流大小,以达到控制电机功率的目的,一般单边电机的电流如式(8):
(8)
(9)
保持油门踏板不变,即需求扭矩保持一个恒定值。把式(7)代入式(8)得到式(9),即单边电机的转速n可以通过控制该电机驱动电流I来控制,即驱动电流可以控制式(5)中的角速度ωi。
2.2 差速控制策略
车辆做转向行驶时,内外车轮的实际行驶路径长度不等,若存在部分车轮的车速过快或者过慢,将导致车辆转向行驶困难,轮胎与地面接触表面会相对地面做滑转或者拖动,加速轮胎的磨损,减短轮胎寿命[9]。
转速控制策略是在车辆转向时保持内外车轮的驱动转矩相同,即平分整车需求扭矩,通过控制改变内外侧车轮对应驱动电机的转速,使内外车车轮以不同的速度行驶,实现电子差速。电驱动桥大客车差速过程如下:保持油门踏板不变,转动方向盘;通过CAN线把车轮的转向角δ以及当前车速v数据传递给整车控制器,整车控制器计算内外驱动车轮的纵向线速度,根据笔者设计的模糊PID差速控制系统计算出内外侧车轮对应驱动电机的驱动电流变化量;电机控制器根据此驱动电流变化量控制对应的电机转速,实现整车的差速行驶。
3 差速系统模糊PID器设计
笔者设计一种调整差速系统控制量的模糊PID控制器,这种控制器能够在大偏差范围内利用模糊控制推理的方法,调整系统的控制量单边电机的电流变化控制量U,而在小范围偏差范围内转成PID控制,避免由于误差变化率过大导致PID超调[10]。
3.1 模糊控制器设计

3.1.1 隶度函数
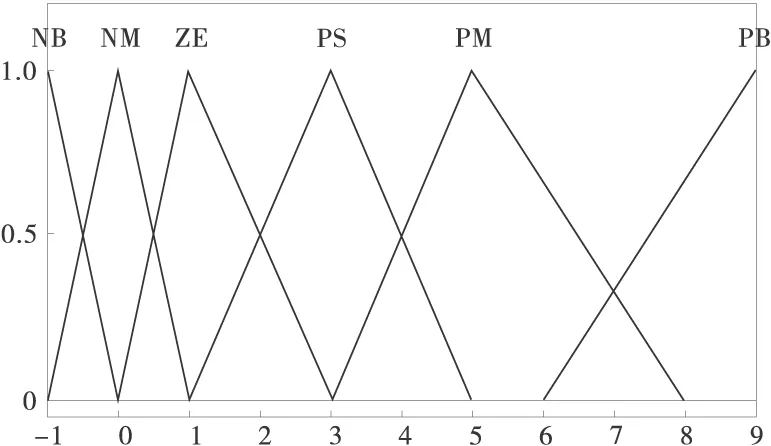
图2 滑转率误差e的隶度函数

图3 滑转率误差变化率ec的隶度函数
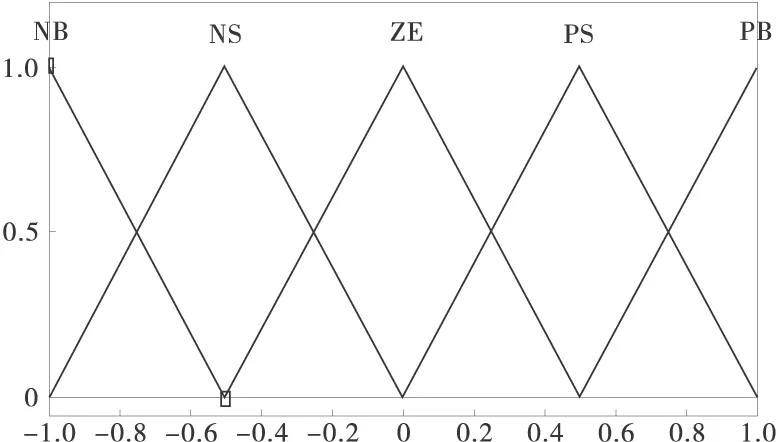
图4 输出电流变化量U的隶度函数
3.1.2 模糊规则
模糊规则是将满足模糊化的多个变化条件的前提下推理出一个决策结果的推理法则,一般这个决策结果经过反模糊化即为真实输出值。这个推理规则一般是通过经验或者仿真调整得出,本次设计的电流变化控制量ΔI的模糊控制规则见表1。
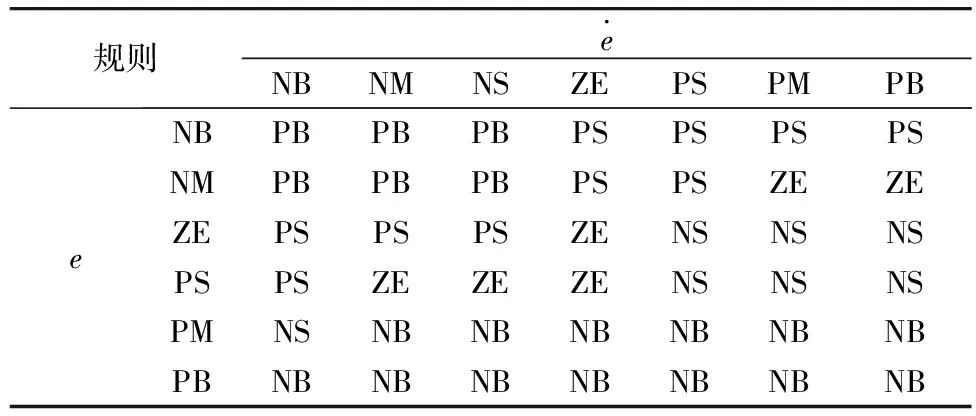
表1 模糊控制规则
3.2 PID控制器设计
PID控制器是具有比例、积分和微分控制规律的控制器。设计的PID控制器以实际滑转率和理想滑转率的差值作为输入量,输出变量为电机驱动电流调节量。根据PID控制器输出电机驱动电流调节量,改变驱动电机的转速,实现左右车轮的差速协调行驶,滑转率保持在理想滑转率附近[12]。PID算法的离散形式如下:
(10)
式中:kp,ki,kD分别为比例系数、积分系数、微分系数;u(t)为t时刻电机的驱动电流大小;e(t)为t时刻电驱动桥驱动轮滑转率误差。
3.3 模糊PID切换设计
本次设计的模糊PID控制器在小误差范围内采用PID控制,滑转率误差超过设定指标采用模糊控制,中间的切换指标设计如式(11):
(11)
式中:e0为设定切换模糊控制和PID控制的门限值。
4 差速系统模型建立和仿真分析
4.1 电驱动桥大客车差速系统仿真模型建立
电驱动桥大客车转向时,内外侧车轮的滚动距离不同。笔者对内外侧车轮分别采用模糊PID控制,达到内外侧车轮的滑转率数值在理想滑转率附近,提高车辆的行驶性能。建立了差速控制的MATLAB/Simulink模型,利用FuzzyLogicToolbox将上文设计的基于滑转率的模糊PID控制器转换为仿真模型,其框图模型如图5。内外侧车轮受单独的电机控制器和独立的模糊PID控制器控制。整车模型根据车辆的车速和整车质量,输出电机所需的驱动电流,当有转向角信号输入时,内外侧各自对应的模糊PID控制器起效,经过控制规则输出内外侧电机驱动电流的变化量,改变内外侧电机的转速,使得内外侧车轮滑转率在理想值附近,实现差速控制。
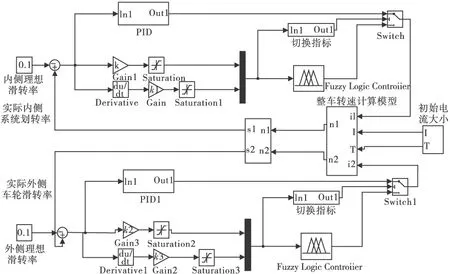
图5 差速仿真系统模型
4.2 仿真分析
本次仿真车辆模型的主要参数见表2,该控制系统通过调节内外侧电机的驱动电流来调整驱动轮的滑转率,使滑转率收敛于理想数值。

表2 车辆模型主要参数
工况模拟:在平直无坡路面上,电驱动桥大客车以车速v=20 km/h匀速行驶,在某一时刻(记t=0 s)时,前转向轮接受到一个δ=π/5的转向信号,电驱动桥需要差速行驶,车辆保持车速v=20 km/h。仿真系统调整内外侧车轮驱动电流大小,假定本次选择的内外侧理想滑转率均为sd=0.1,仿真结果如图6、图7。
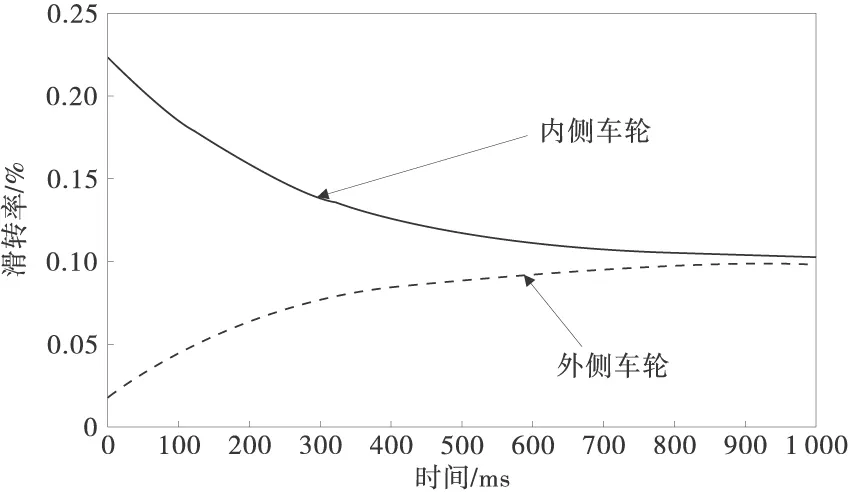
图6 内外侧驱动轮滑转率仿真曲线
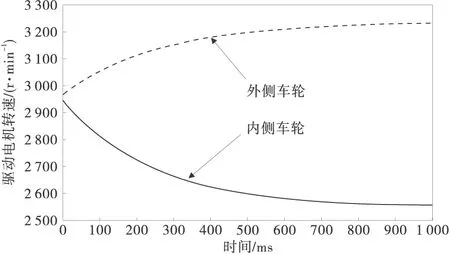
图7 内外侧驱动轮对应驱动电机的转速变化仿真曲线
从图6仿真曲线可知,在转向角刚响应时,驱动轮滑转率有一定得振荡,利用模糊控制将滑转率控制到较小的超调量范围;随后通过PID控制,内外侧车轮的滑转率在趋于收敛到理想数值sd=0.1附近。
本文的控制模型设定的初始左右车轮的滑转率为sd=0.1。从理论分析,车辆转向时电驱动桥内侧车轮一定处于滑转状态;而外侧车轮可能处于滑转率小于理想值的状态下行驶,也可能出现滑转率<0即车轮处于拖滑状态,外侧车轮的具体状态主要取决于整车参数和车辆车速、转向角的大小。从图6中可以看出,内侧车轮的滑转率从一个较高数值下降到趋于理想滑转率状态;外侧车轮开始处在滑转率小于理想值的状态,在系统控制下趋于理想值。
从理论分析,转向时外侧车轮相比内侧车轮走过更长的路程,即正常行驶时外侧车轮需要更高的转速。内侧车轮必须降低电机转速,使滑转率减小,避免车轮打滑现象发生;外侧车轮提高电机转速,使车轮的滑转率尽快达到理想值,避免车轮拖滑现象发生。图7仿真的内外侧车轮各自对应驱动电机的电机转速图曲线变化与理论分析一致。
5 结 语
利用电驱动桥的两台电机可以独立控制转速的特点,在车辆差速时对内外侧电机分别设计一个基于滑转率的模糊PID控制器,实现差速时内外侧独立的模糊PID控制,互不影响。仿真结果表明,内侧车轮需通过降低电机转速来降低车轮的滑转率数值,外侧车轮需提高电机转速来提高滑转率的数值。这与差速时内侧车轮有较高的滑转率、外侧车轮需要较高转速的理论分析结果一致。充分发挥模糊控制和PID控制的特点,较好的控制了内外侧车轮的滑转率,系统反应迅速。
[1] Tahami F,Kazemi R,Farhanghi S,et al.Fuzzy based stability enhancement system for a four-motor-wheel electric vehicle [J].SAE Technical Paper,2002(1):1588.
[2] 靳立强,王庆年.电动轮驱动汽车电子差速控制策略及仿真[J].吉林大学学报,2008,38(1):1-6. Jin Liqiang,Wang Qingnian.The Simulation of electronic differential control strategy on electric wheel drive vehicle [J].Journal of Jilin University,2008,38(1):1-6.
[3] 彭思仑.电动汽车差速控制策略研究[D].武汉:武汉科技大学,2011. Peng Silun.Electric Vehicle Differential Control Strategy [D].Wuhan:Wuhan University of Science and Technology,2011.
[4] 赵艳娥,张建武.轮毂电机驱动电动汽车电子差速系统研究[J].系统仿真学报,2008,20(18):4767-4772. Zhao Yan’e,Zhang Jianwu.Study on electronic differential control system of independent in-wheel motor drive electric vehicle [J].Journal of System Simulation,2008,20(18):4767-4772.
[5] 赵硕.电动轮驱动汽车差速技术研究[D].长春:吉林大学,2006. Zhao Shuo.Electric Wheel Drive Vehicle Differential Research [D].Changchun:Jilin University,2006.
[6] 靳立强,王庆年,张缓缓.电动轮驱动汽车差速性能试验研究[J].中国机械工程,2007,18 (21):2632-2636. Jin Liqiang,Wang Qingnian,Zhang Huanhuan.Test research on differential performance of electric wheel drive [J].China Mechanical Engineering,2007,18 (21):2632-2636.
[7] 郭孔辉,王德平.汽车驱动防滑控制理论的初步研究[J].吉林工业大学学报,1997(3):1-4. Guo Konghui,Wang Deping.The preliminary study of the automotive drive-slip control theory [J].Journal of Jilin University of Technology,1997(3):1-4.
[8] 余志生.汽车理论[M].5版.北京:机械工业出版社,2009. Yu Zhisheng.Car Theory [M].5thEd.Beijing:Mechanical Industry Press,2009.
[9] 刘峰.轮毂驱动电动汽车整体设计与研究[D].武汉:武汉理工大学,2011. Liu Feng.In-Wheel Motor Drive Electric Vehicle Design and Research [D].Wuhan:Wuhan University of Technology,2011.
[10] 张国良,曾静.模糊控制及其MATLAB应用[M].西安:西安交通大学出版社,2002. Zhang Guoliang,Zeng Jing.MATLAB Fuzzy Control and Its Application [M].Xi’an:Xi’an Jiaotong University Press,2002.
[11] 赵国柱,滕建辉,魏民祥,等.基于模糊控制的电动汽车低速再生ABS研究[J].中国机械工程,2002,2(1):117-121. Zhao Guozhu,Teng Jianhui,Wei Mingxiang,et al.Study on low-speed regenerative braking of electric vehicle as ABS based on fuzzy control [J].China Mechanical Engineering,2002,2(1):117-121.
[12] 刘志新,张大为.基于滑转率的四轮驱动汽车防滑模糊控制仿真[J].农业机械学报,2005,12(36):21-24. Liu Zhixin,Zhang Dawei.The simulation of anti-skid fuzzy control method based on the slip rate of four-wheel-drive vehicle [J].Transactions of the Chinese Society of Agricultural Machinery 2005,12(36):21-24.
Fuzzy PID Control of Electronic Differential System in Electric Drive Axle Buses
He Ren,Ni Yunlei
(School of Automobile & Traffic Engineering, Jiangsu University, Zhenjiang, Jiangsu 212013, China)
Differential control strategies of in-wheel motor bus were researched. Calculation method about drive motor current with the corresponding wheel speed was deduced, when the motor was in constant torque. Speed coordination of the left and right wheels individually control method was proposed, which was fuzzy PID control based on slip rate. Fuzzy PID controller was designed, and the slip rate calculation method of the left and right drive wheel was deduced during differential condition; finally, the Matlab/Simulink control model system was built. Slip rate changing curve of the inner and outer drive wheel was simulated in differential condition. The proposed control system responses rapidly. Both the inner and outer drive wheel slip rate tends to be an ideal value. The simulation results are consistent with the theoretical ones.
vehicle engineering; electric drive axle; differential; fuzzy control; PID control
10.3969/j.issn.1674-0696.2015.04.31
2013-05-04;
2013-07-28
江苏省科技成果转化项目(BA2010050)
何 仁(1962—),男,江苏南京人,教授,博士生导师,主要从事汽车机电一体化技术方面的研究。E-mail:heren@vjs.edu.cn。
倪赟磊(1988—),男,江苏无锡人,硕士研究生,主要从事汽车机电一体化技术方面的研究。E-mail:niyunlei1988@163.com 。
U463.42
A
1674-0696(2015)04-156-05
