适用于非合作照射源的无源雷达运动目标成像方法
2015-06-05庄旭昇
庄旭昇,汪 玲
(南京航空航天大学电子信息工程学院雷达成像与微波光子技术教育部重点实验室,江苏南京210016)
适用于非合作照射源的无源雷达运动目标成像方法
庄旭昇,汪 玲
(南京航空航天大学电子信息工程学院雷达成像与微波光子技术教育部重点实验室,江苏南京210016)
针对运动目标的无源雷达成像,给出一种采用分布式接收孔径的成像方法。首先建立运动目标的回波信号模型,该模型无需任何发射源先验信息。而后基于分布式孔径接收到的回波数据稀少,以目标位置和速度为未知量采用广义似然比检验的方法进行成像,完成成像区域内运动目标的成像和速度估计。最后以WiMAX信号作为机会照射源进行仿真分析,结果表明所用方法能够有效实现无源雷达动目标成像。
无源雷达;运动目标;成像;分布式孔径
0 引 言
无源雷达自身不发射信号,具有隐蔽性好、缓解频带缓冲、成本低等一系列优点,一直是雷达领域的一个重要研究方向。随着近些年通信、导航和网络技术的发展,可利用的机会照射源不断增多,如地面数字电视广播(digital video broadcasting-terrestrial,DVB-T)、全球微波互联接入(worldwide interoperability for microwave access,Wi MAX)、无线局域网信号(wireless-fidelity,WiFi)等,这些照射源信号带宽较宽,具有更好的雷达应用特性,加之频带拥挤问题日益严峻的背景,利用机会照射源的无源雷达又成为研究热点。
目前有关动目标的无源检测和成像方面,绝大多数方法采用双通道进行处理,通过设置参考通道来接收直达波[1-3],以此获取发射源相关信息。文献[4]对机载目标成像进行研究,在单接收机和多个电视发射机配置下采用插值和逆傅氏变换相结合的处理方法,实际上可以看作一种多基逆合成孔径雷达成像技术。由于其获得的图像存在模糊问题,文献[5]采用平滑伪平滑伪魏格纳分布(smoothingpseudo Wigner-Ville distribution,SPWVD)来替换互距离维的傅里叶变换,使成像质量得到了改善。
文献[6]利用目标的自身热辐射对运动目标进行成像,并对距离、多普勒特性进行了分析,主要采用互相关测量基理。基于不同接收单元所接收信号的互相关[79],此种方法不要求发射源信息,能够在非合作照射源情况下很好适用。文献[7]中提出了一种结合滤波反投影技术的延迟相关算法,并获得地面目标的高分辨率SAR图像。文献[8]提出无源多普勒合成孔径(Doppler synthetic aperture hitchhiker,DASH)雷达系统,针对该系统采用对不同接收机接收信号互相关处理并局部后向投影以重构场景反射率的成像方法,实验结果表明该方法能有效的完成成像,且对合作与非合作情形均能适用。
文献[10]采用分布式孔径进行无源雷达成像,本质上也是利用不同接收单元信号的互相关进行成像,可在无需发射源波形和位置信息的情况下,获得静止目标的图像。本文在文献[10]的基础之上,采用分布式孔径的成像思路研究非合作照射源下的无源运动目标成像。首先根据分布式孔径特征获得运动目标的回波模型,然后基于分布式孔径模式下获得的目标测量信号有限,将成像问题描述成运动目标位置和速度未知的广义似然比检验,再以信噪比最大准则得到包含目标位置和速度的检验统计量,检测统计量构成场景位置—速度空间的四维图像,从而确定目标的位置和速度。
1 运动目标无源回波模型
假设发射源位于z,发射波形为sT(t),接收单元位于x,目标位于空间y处,速度为v,则接收回波信号[11- 12]为

式中,n(t)为噪声;g为格林函数,描述电磁波的传播特性; qv(y)指的是空间中速度为v、位于y处散射体的相空间分布;Ein为入射场,其具体表达式为


对于自由空间中,式(3)中的格林函数可具体表示为

分布式孔径探测模式中,假设有N个接收天线单元,位于xi(i=1,2,…,N)处,接收单元接收到的回波信号均可由式(1)得到,但是对于非合作照射源,发射源信息未知,因此基于该回波模型进行信号处理要求额外的系统设计或处理以获得发射源信息。考虑到各接收单元的回波信号都源自同一入射场,只是散射场由于各接收机所处位置的不同而不同,因此可利用接收单元信号间的联系,建立起无需发射源信息的动目标无源回波模型,如图1所示。

图1 无源分布式孔径雷达动目标回波模型构造示意图
令u(y,v,ω)=qv(y)E^in(y,ω),可以发现其只与目标和入射场有关,则由式(3),接收单元xi(i=1,2,…,N)处的回波信号可写为

式中,Py,v,i表示从目标位置y到接收机xi的前向传播算子。由于场景中所有的回波信号来自于同一u(y,v,ω),因此可以用其他接收机处获得的回波来表示位于xi处接收单元的回波信号^mi(ω),若假定^mj(ω)为参考信号,则^mi(ω)可表示为

式中,P-1y,v,j表示由接收单元xj到运动目标的后向传播算子。
若目标处于自由空间中,此时式(6)可写为

式中,γy,v,ij表示第i与第j个接收机的尺度因子比,记为

进一步构造回波信号的向量模型:

式中

为测量信号的向量形式,^mji(i≠j)表示以参考接收单元回波信号^mj来表示空间中xi处接收机所获得的回波信号。参考信号mr(ω)和噪声n(ω)则具体表示为

式中,^ni(i=1,2,…,N且i≠j)为第i个接收机的热噪声。上述m,mr,n均为(N-1)阶的列向量。
此外,式(9)中前向传播算子和后向传播算子可以用对角矩阵描述,即

式中,Py,v的维数为(N-1)×(N-1)。
2 基于广义似然比检验的成像方法
分布式孔径中,由于各个接收机在空间中随机、稀疏分布,其接收到的目标测量信号不仅微弱,而且数据有限,此时若采用诸如反投影或极坐标格式等传统成像方法,则需要对数据进行插值或者外推处理,这将导致目标的图像重建受到影响,有时甚至无法完成。本节给出基于广义似然比检验(generalized likelihood ratio test,GLRT)]理论[13]的无源成像方法,此时成像问题将演化成对场景中每一假想的目标位置和速度的二元假设检验。然后由此获得检验统计量,形成包含空间和速度分辨的四维图像。
由式(9)设计如下的二元假设检验:

式中,m,mr,n,Py,v的定义如式(10)、式(11)、式(12)、式(13)所示。回波信号模型m在两种假设H0和H1下的数学期望和协方差分别为
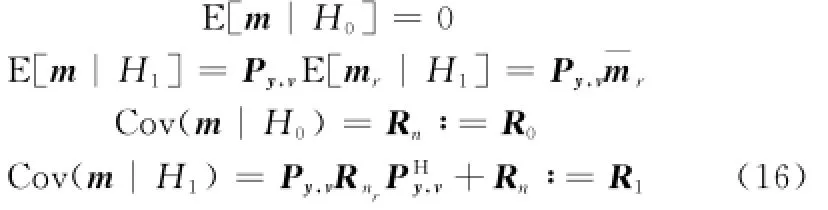
式中,¯mr=E[mr|H1],为参考信号的期望;Rn(ω,ω')= E[n(ω)nH(ω')],为噪声向量n的协方差;Rnr(ω,ω')=,为噪声向量]的协方差。
下面将设计线性检测器,并选取最大信噪比作为准则,检测器的输出λ可表示为

式中,w=[w1w2… wN]T,表示检测器系数,称之为成像模板。
式(17)表明,该检测器可看成线性滤波器。除参考接收单元外,场景中其余各个接收单元所接收到的回波信号依次经过检测器滤波处理,其输出的累加和为检测统计量λ,从而信噪比[14]表示为

由式(18)可得最佳成像模板为

若假定[1/2(R1+R0)]-1矩阵对角线上元素为¯Si(ω)(i=1,…,N且i≠j),则由文献[12]可知,¯S-1可近似为一个对角矩阵,从而上式简化为

对于空间中位于y处、移动速度为v的目标,结合上文和文献[12],最终推出点目标的具体模板为

上式表明在自由空间中,通过对参考单元所接收到的回波信号进行尺度变换、延时和滤波处理后,即可获得相应的最佳成像模板。
3 成像仿真
本节将根据上述方法,以WiMAX[15]信号作为无源雷达机

式中,Ts表示一个符号的持续时间;f0为载波频率;dn为第n个子载波上传输的复信号;Δf为每个子载波上的步进频率,即Δf=B/N。
仿真中采用的Wi MAX信号带宽为20 MHz,载频为6 GHz,持续时间为0.13 s,其波形特性如图2所示。会照射源,对无源分布式孔径雷达运动目标成像进行仿真,用于初步验证无源分布式孔径雷达运动目标成像方法的有效性。
WiMAX信号数据传输距离最远为50 km,信号带宽可达20 MHz,与其他可利用的机会照射源相比,能提供更远的探测距离、更高的距离分辨率。WiMAX信号的表达式[16]为
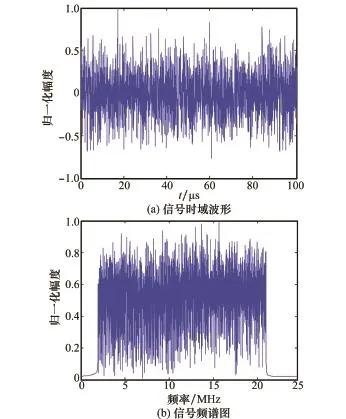
图2 Wi MAX信号波形图
现考虑如下仿真情形,场景范围(单位:m)设为[0,3 000] ×[0,3 000],像素大小为5 m×5 m,即成像区域包含601× 601个单元;假定目标的速度(单位:m/s)位于[-20,20]× [-20,20]的范围内,像素大小为0.2 m/s×0.2 m/s,速度二维空间包含201×201个像素单元;两运动目标(单位:m)分别位于[2 505,1 895,0]、[1 000,1 200,0],速度(单位: m/s)分别为[-10,15,0]、[12,-10,0],反射率为1。
假定接收机、发射机和目标都位于相同的z平面,即z=6 m。单台发射机(单位:m)位于[2 200,3 000,6],发射WiMAX信号。3台与5台接收机(单位:m)分别位于[2 200,0,6],[500,0,6],[0,1 200,6]和[2 200,0,6],[500, 0,6],[0,1 200,6],[0,2 400,6],[0,1 895,6]。
由上节可知,通过检验统计量λ(y,v)即可形成场景的四维图像,该图像包含了二维空间的目标分布以及速度信息。为了完成最终的目标参数(位置和速度)估计,可按照以下流程处理:首先,对每一个速度(v1,v2)处的四维图像进行搜索,找出最大值,确定出此时具有最大散射率的目标,逐渐得到峰值图,而后以该峰值图中最大值对应的~v作为目标的速度估计;接下来,令v=~v,得到该四维图像的截面——位置图,并以此时图中的最大值~y作为目标的位置估计。类似的,此时可以令y=~y,得到四维图像的另一截面——速度图,从而便于更好的观察与分析。
采用单发射机和多接收机的目标成像仿真结果如图3和图4所示,从中可以看出,运动目标的位置和速度被正确重建,说明利用WiMAX信号可以实现无源分布式孔径雷达动目标成像。此外,图中多条线束交点正是运动目标的位置和速度所在,且在发射机配置相同的情况下,接收机数目越多,形成的线束越多,其相交处亮度愈强,成像分辨率也就愈高。
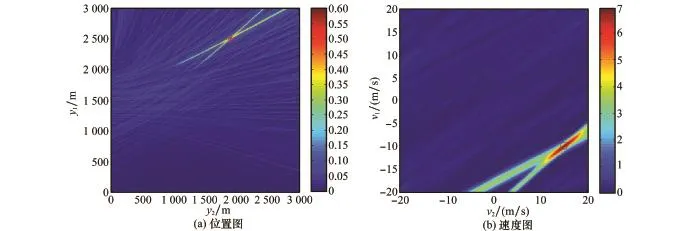
图3 采用3台接收机的目标成像仿真
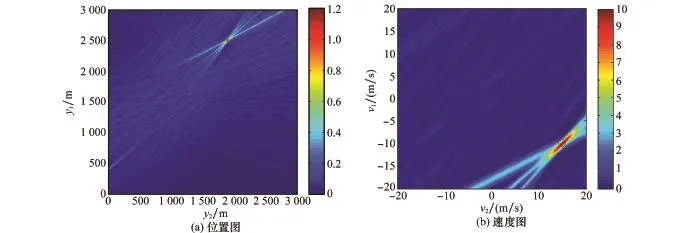
图4 采用5台接收机的目标成像仿真
当场景中配置有多台发射机时,考虑2台发射机与5台接收机情形。此时目标与接收机的参数设置如上,2台发射机(单位:m)位于[2 200,3 000,6],[3 000,1 900,6],成像结果如图5所示。
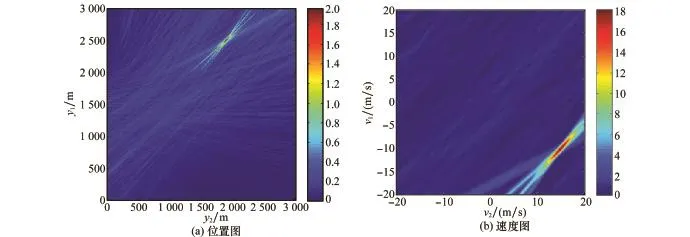
图5 采用多台发射机的目标成像仿真
图5中,目标的位置和速度虽被正确重建,但成像场景中出现有虚假目标,这主要是因为多发射机情形下不同发射机相互作用的结果,实际应用中可以采取降低发射波形间的相关性,从而弱化虚假目标的强度。
此外,将其与图4对比,不难发现,其成像相比单发射机情形明显得到增强。因此可以推断,发射机数目的增加,虽然能够提高无源分布式孔径雷达运动目标成像强度,但同时也会降低成像质量。
当场景中有多个目标分布时,考虑10个接收机和2个发射机下成像效果。此时目标与发射机设置如上,各接收机空间位置(单位:m)分布如下:[1 500,0,6],[3 000,0, 6],[1 500,3 000,6],[3 000,1 000,6],[0,0,6],[0, 3 000,6],[3 000,2 000,6],[0,2 000,6],[3 000,3 000,6], [0,1 000,6],成像结果如图6所示。
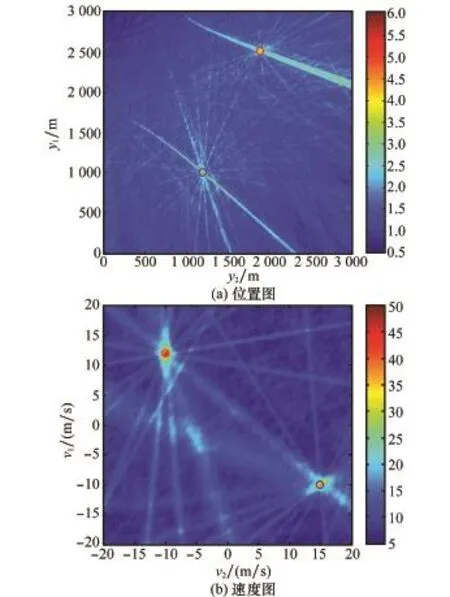
图6 多目标情形下成像仿真图
从图6可以看出,两个目标的位置与速度信息被正确估计。但应当注意的是,此时成像场景还存在虚假目标,且其背景干扰较大,这一方面来自于多发射机间的互相关,另一方面是由于不同目标回波之间的相互作用所导致的,可以通过降低发射波形间的相关性、旁瓣抑制等方法处理后,合理设置门限以完成目标检测。
为了能够对成像效果更加具体化描述,本文使用峰值旁瓣比(peak side-lobe rate,PSLR)和3 dB宽度等指标来衡量点目标的成像性能。
图7和图8分别为不同配置下目标1(即位于[2 505 m, 1 895 m,0 m]处)的位置与速度剖面图。分析该点目标剖面图,可以得出目标的峰值旁瓣比及相对应3 dB宽度如表1和表2所示。
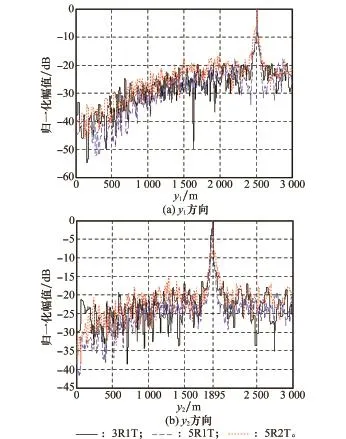
图7 点目标位置剖面图
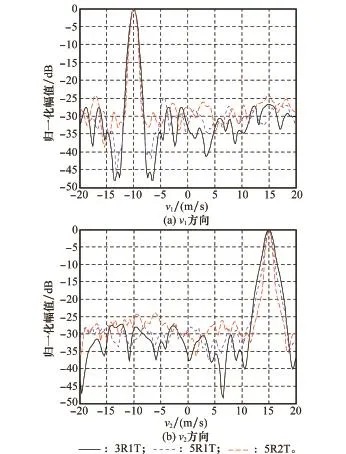
图8 点目标速度剖面图
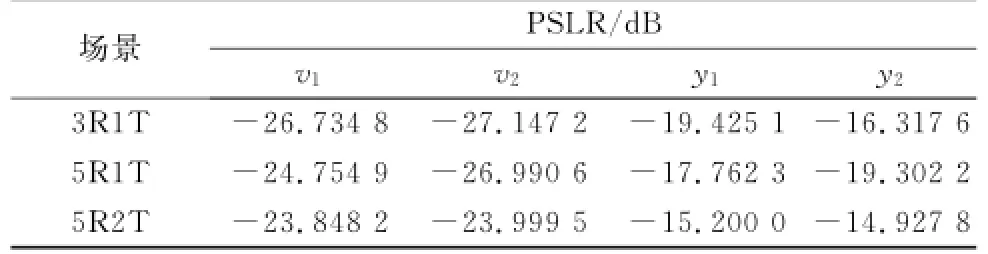
_表1 点目标1各向PSLR值

_表2 点目标1各向3 dB宽度值
观察表1和表2可得,当场景中只有单部发射机时,接收机个数的递增一方面使得位置、速度空间各方向PSLR值基本上逐渐增大,说明成像对比度相应减弱;另一方面,其各向3 d B宽度呈递减趋势,说明成像分辨率得到提高。相比于等数目接收机的单发射机情形,当配置多台发射机时,成像对比度减弱,这主要是由于虚假目标产生的干扰所导致。此外,可以发现,不论位置空间还是速度空间,其横向(v1/y1方向)分辨率均优于纵向(v2/y2方向),这可能与发射机、接收机的分布和个数有关。
4 结 论
本文重点研究了分布式孔径配置下的无源雷达动目标成像方法,并利用WiMAX信号作为无源雷达机会照射源,验证本文所提方法的可行性。该方法不需要发射源波形信息,而是针对空间中各接收单元源于同一入射场,通过选取任一接收单元作为基准,从而建立分布式孔径下的无源动目标回波模型。然后根据二元假设检验,选取最优准则得到包含成像场景位置和速度空间的四维图像,最后完成目标的位置和速度估计。文中自由空间下的WIMAX仿真结果表明该方法是有效的,下一步将结合多径以及杂波等实际环境对目标探测与成像进行深入研究。
[1]O'Hagan D W,Baker C J.Passive bistatic radar using FM radio illuminators of opportunity[C]∥Proc.of the New Trends for Environmental Monitoring Using Passive Systems,2008:1-6.
[2]Colone F,Falcone P,Bongioanni C,et al.WiFi-based passive bistatic radar:data processing schemes and experimental results[J]. IEEE Trans.on Aerospace and Electronic Systems,2012,48 (2):1061-1079.
[3]Poullin D,Flecheux M,Klein M.Elevation angle estimation for low-altitude targets using DVB(SFN broadcasters)[J].IEEE Trans.on Aerospace and Electronic Systems Magazine,2012, 27(11):27-35.
[4]Wu Y,Munson Jr D C.Multistatic synthetic aperture imaging of aircraft using reflected television signals[J].Algorithms for Synthetic Aperture Radar Imagery VIII,2001,4382:1-12.
[5]Wu Y,Munson Jr D C.Wide-angle ISAR passive imaging using smoothed pseudo Wigner-Ville distribution[C]∥Proc.of the IEEE Radar Conference,2001:363-368.
[6]Kulpa K S.Multi-static entirely passive detection of moving targets and its limitations[C]∥Proc.of the IEEE Radar,Sonar and Navigation,2005,152(3):169-173.
[7]Yarman C E,Wang L.Doppler synthetic aperture hitchhiker imaging[J].Inverse Problems,2010,26(6):65006-65031.
[8]Yarman C E,Yazici B.Synthetic aperture hitchhiker imaging[J]. IEEE Trans.on Image Processing,2008,17(11):2156-2173.
[9]Wang L,Son I Y.Passive imaging using distributed apertures in multiple-scattering environments[J].Inverse Problems,2010, 26(6):065002.
[10]Wang L,Wu S H.A novel passive radar imaging method using distributed apertures[J].Journal of Electronics&Information Technology,2011,33(3):616-621.(汪玲,伍少华.一种新的采用分布式孔径的无源雷达成像方法[J].电子与信息学报,2011,33(3):616-621.)
[11]Colton D,Kress R.Inverse acoustic and electromagnetic scattering theory[M].New York:Springer,2012.
[12]Wang L,Yazici B.Passive imaging of moving targets using sparse distributed apertures[J].SIAM Journal on Imaging Sciences,2012,5(3):769-808.
[13]Kay S M.Fundamentals of statistical signal processing,Volume I:estimation theory[M].Englewood Cliffs,NJ:Prentice-Hall,1993.
[14]Kay S M.Fundamentalsof statistical signal processing:detection theory[M].2nd ed.Englewood Cliffs,NJ:Prentice Hall,1998.
[15]Lang W M,Liu B.Principles and applications of Wi MAX technology[M].Beijing:Machinery Industry Press,2008.(郎为民,刘波.WiMAX技术原理与应用[M].北京:机械工业出版社,2008.)
[16]Committee L S.Air interface for fixed broadband wireless access systems[S].IEEE standard for local and metropolitan area networks,2009.
Moving target imaging method for passive radar applicable to non-cooperative illumination sources
ZHUANG Xu-sheng,WANG Ling
(Key Laboratory of Radar Imaging and Microwave Photonics,Ministry of Education,College of Electronic and Information Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
An imaging method that uses the distributed apertures for passive radar imaging of moving targets is presented.First of all,we present the signal model of the moving targets,which does not require any information of the transmitting sources.Then,due to the limited number of received signals obtained via the distributed apertures,we formulate the imaging problem as a generalized likelihood ratio test(GLRT)with unknown target position and velocity and complete the target imaging and velocity estimation by applying the GLRT at each possible position and velocity.Finally,we perform simulations using the worldwide interoperability for microwave access(Wi MAX)signals as an illuminator of opportunity and demonstrate the effectiveness of the proposed method.
passive radar;moving targets;imaging;distributed aperture
TN 957.52;TN 958.97
A
10.3969/j.issn.1001-506X.2015.03.13
庄旭昇(1990-),男,硕士研究生,主要研究方向为无源雷达成像。E-mail:zxs_nuaa_12@foxmail.com
网址:www.sys-ele.com
1001-506X(2015)03-0560-06
2014- 04-28;
2014- 07-06;网络优先出版日期:2014- 09-18。
网络优先出版地址:http://w ww.cnki.net/kcms/detail/11.2422.TN.20140918.1715.001.html
国家自然科学基金(61001151);航空科学基金(20132052035);中央高校基本科研业务费科研基地创新基金(NJ20140008);国家基础科研(B2520110008);江苏高校优势学科建设工程资助课题
汪 玲(1977-),女,副教授,博士,主要研究方向为雷达信号处理。E-mail:tulip_wling@nuaa.edu.cn
