浅析全自动无人驾驶对地铁车辆基地设计的影响
2015-04-20徐彪
徐彪

摘 要:简要分析了全自动无人驾驶的实现对地铁车辆基地各项功能的需求,以北京地铁M17线次渠南停车场设计为例,阐述了其对地铁车辆基地设计的影响,同时,建议在设计过程中提高各专业间的接口协调性。
关键词:全自动无人驾驶;车辆基地设计;功能分区;轨道交通
中图分类号:U239.5 文献标识码:A DOI:10.15913/j.cnki.kjycx.2015.05.015
1 国内全自动驾驶技术的发展现状
近年来,全自动无人驾驶地铁在全球轨道交通领域日渐升温,已经成为了今后城市轨道交通发展的大方向。目前,国内包括北京、上海等城市都已经引入了全自动无人驾驶地铁,并且多条新线均按照该技术要求建设。全自动化的控制系统不仅可以提高列车的发车频率,减少两站间的等候时间,还能使列车始终保持最佳的安全性能,进而提高乘客的舒适感。
2 对车辆基地的功能需求
2.1 对工艺专业的需求
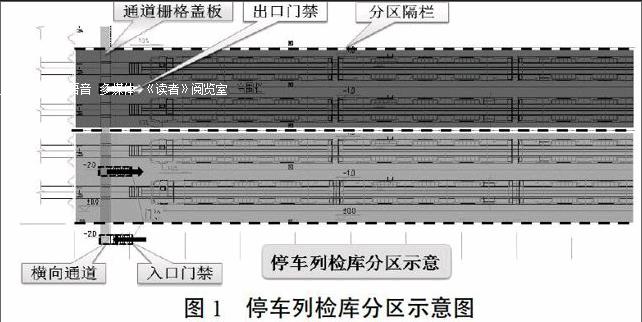
全自动无人驾驶要求车辆具有休眠和唤醒的功能。为了保证检修安全,应严格控制人员进入停车列检区。因此,停车列检区域需要划分成多个防护分区,通常将每两股道设置为1个防护分区,采用防护围栏分隔。另外,在靠近库门和两列车之间设置2处横向地下通道,用来联通各个分区,在通道入口设置门禁。从正线退出运营的列车优先停放在一个分区,停满后,此分区切断列车供电后,工作人员才可以通过库内横向地下通道进入两股道间的防护分区进行列检作业。
通常情况下,一线两列位的停车列检库库内检修地沟按50%设置。由于分区开展列检作业管理,并且检修天窗的时间不足,所以,全自动无人驾驶要求停车列检库按前后列位设置检修地沟。
2.2 对站场专业的需求
站场总平面布置需要按照全自动无人驾驶区和人工驾驶区域分区布置。洗车作业也采用无人驾驶,洗车库、停车列检库和库外车场线路一起组成全自动无人驾驶区域;镟轮和试车作业仍然采用常规的人工驾驶模式,其与检修库和库外车场线路一起组成了人工驾驶区域。各分区功能应相对独立,不宜间隔设置,防止出现作业干扰的情况。
在全自动无人驾驶区域设置洗车专用牵出线,同时,需要考虑信号保护距离的长度。在人工驾驶区域设置有人/无人转换牵出线,进而减少调车作业干扰,提高车辆的运行效率。
2.3 对车辆段其他专业的需求
根据信号要求,一线两列位布置的停车列检库头的列车头距库门距离≥15 m,两列位之间的距离≥26 m,后一列位车尾距车挡距离≥15 m,所以,应相应地增加停车列检库的长度。
在信号系统方面,应增加与停车场车库门的接口。停车场车库门属于专业建筑,而信号系统和其接口是在唤醒车辆前或入库前,向门电机控制电路发送开、关库门的指令,进而实现车辆自动出、入库。信号系统的计算机连锁设备与门电机控制电路使用的是硬线接口,而门电机接收信号系统的命令则会控制车库门的状态——开启或关闭。
3 车辆基地设计方案
以北京地铁M17线次渠南停车场为例。
3.1 停车列检库工艺设计
次渠南停车场具有停车列检、洗车、镟轮、月检和临修的功能。其中,停车列检库按一线两列位设置,列检18股道36列位。结合停车列检库预留上盖开发条件,将每两股道设为一跨,刚好满足防护分区的要求,在每跨间加设防护围栏。在设计停车列检库时,考虑到信号防护距离后,应比常规设计加长36 m,库内检修地沟按100%设置。在入库处平交道和两列车中间通道设置垂直轨道方向、贯穿于整个大库的地下通道,以供检修人员通行。图1为停车列检库分区示意图。
3.2 站场总平面布置
检修库设临修1股道、月检2股道,工程车库与其合建,后端为检修库的部件检修区。停车场以停车列检库和检修库为主体,采用并列尽端式布置,将运用库和检修库并列设置在场地的东端。运用库位于南侧,临近亦庄站前区南站,便于运用库上盖结合车站进行一体化开发;检修库位于运用库的北侧。洗车库为尽端式布置,贴建在停车列检库的南侧;镟轮库为尽端式布置,建在检修库的北侧。工程车库与检修库合建,采用顺装布置。工务料棚布置在咽喉区北侧,尾部设置露天料场。停车列检库、洗车库和所属库外车场线路构成全自动无人驾驶区,检修库、镟轮库、工务料棚和附属线路构成人工驾驶区域。这种布置方法分区明确,减少了车场作业的相互干扰,有效地提高了检修效率。图2为次渠南停车场站场总平面图。
4 结束语
全自动无人驾驶是一项复杂的系统工程。在设计车辆基地的过程中,要充分考虑实现该功能的各项需求,并加强协调各专业的接口。另外,全自动无人驾驶增加了车辆基地的建筑和用地规模,在前期规划选址阶段,需要预留好计划用地。
参考文献
[1]北京城建设计研究总院有限责任公司,中国地铁工程咨询有限公司.GB 50157—2013 地铁设计规范[S].北京:中国建筑工业出版社,2014.
〔编辑:白洁〕
Abstract: This paper analyzes the realization of the need for automatic driverless metro vehicle base functions to Beijing Subway Line M17 sub-canal south parking lot design, for example, described its impact on metro vehicle base design, is also recommended improve the interface between the professional coordination in the design process.
Key words: automatic driverless; vehicle base design; functional area; rail transport
