充气膜结构泄气过程的摄影测量实用方法
2015-03-18沈珊珊龚景海孟文清
沈珊珊,龚景海,孟文清
(1.上海交通大学船舶海洋与建筑工程学院,上海200240;2.河北工程大学 土木工程学院,河北邯郸056038)
在科学研究中,当需要知道研究对象的变化规律或其变化的轨迹,或研究其三维空间的变化时,摄影测量是一种迅速、精确的测量法[1]。摄影测量方法在检测建筑物或构筑物的变形、桥梁动静载检测、建构筑物爆破倒塌过程、监测矿山井筒变形[2]等方面的应用研究都取得了较好的研究成果。本次研究的对象是大型充气膜结构泄气过程中的摄影测量,试验中测点设置较多且在不断的运动,用经纬仪、全站仪等测量比较困难,而摄影测量恰好弥补了这些缺陷。本研究为大型结构的动态过程测量提供一种实用方法。
1 充气膜结构摄影测量试验简介
1.1 试验介绍
本试验是对在建的充气膜结构进行泄气试验。充气膜结构的平面尺寸97 m ×80 m,充气成型高度32 m。主要利用摄影测量原理测试泄气过程中不同时刻膜面整体下降形态,计算横剖面上特定点的位移。
1.2 试验过程
首先对需要测量的点进行标记,在横截面的膜面上均匀布置7个点(如图1),在地面另布置进行对比矫正的标志点。利用全站仪确定地面所有标志点的相对坐标。
随着气压下降,膜面会随之下降,膜面标志点也随之产生位移,位移以竖向位移为主,但由于气压的下降,膜面失去刚度,因此标志点也会产生水平位移,但由于测试时风速很小,故水平位移不明显。相机每隔t时间拍摄一张照片,由此得到各个时刻的标志点位移情况。

2 试验数据处理及分析方法
2.1 求相机仰角
利用photoshop读取测点在相片中的像素位置。相机的仰角可以通过平面换算求出。
图2是相机与测点D所在的垂直面,中间部分相机无畸变,可以用来计算仰角。O点为相机所在高度,p1、p2为标尺实际高度,hp2为测点D到地面的实际距离。由于相机有仰角,因此所拍摄的照片不是h-S-p1-p2面,而是H-S-P1-P2面。可以通过几何关系换算,求得相机仰角。垂直面上的p1实际点在相片上应为P1点。

α,s,l为已测量出的数据,而各直线方程为:
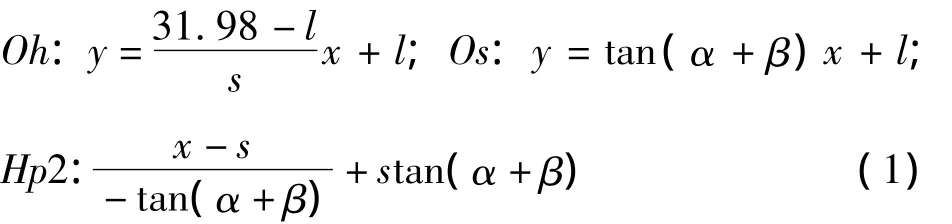
确定各点坐标及各线段的长度:(令t=tan(α+β))
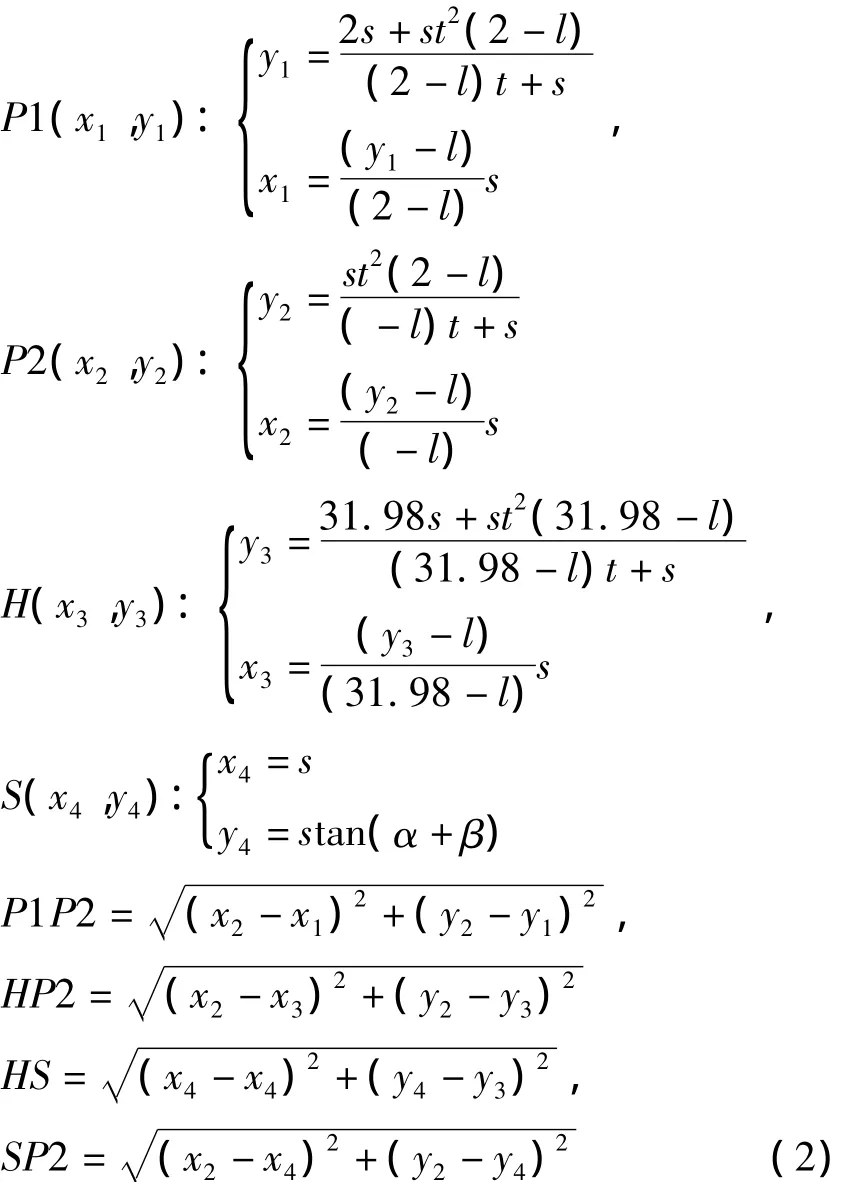
换算出斜平面上标尺与总高比:

根据上述原理运用vb编程,得出相机仰角β及用β角换算出结构总高。
2.2 将测点的像素点坐标转换为实际坐标
X0、Y0分别为S像素点坐标,Dx、Dy分别为x、y方向每像素点对应的实际长度。为计算方便,先转换坐标系,并将转换后的坐标系单位由像素变为米。

2.3根据位移视差法求像平面坐标
2.3.1位移视差法的基本原理
位移视差法是用于测量物体二维变形的一种近景摄影测量方法[3-4]。它是基于相机位置固定,像平面与所测平面平行,内外元素保持不变,相隔固定时间拍摄的两张相片。将第一张相片作

式中:ΔX、ΔY为变形量;ΔPx、ΔPy为左右视差和上下视差;Z为相机光心到所测物面的距离;f为相片主距。
2.3.2利用位移视差法求测点的实际坐标
位移视差法条件[3]:相机的像平面与物平面平行,被测物体的移动范围在光心附近,则相片与物体有可靠的线性关系。由于测量时相机有仰角,因此像平面与物平面不再平行,不满足位移视差法的条件。可通过转换平面,使之满足位移视差法条件。
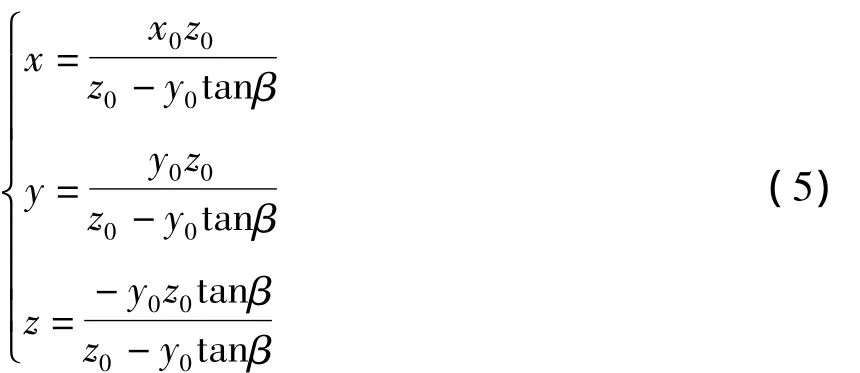
如图3所示,E平面为所测物平面;E’平面为与主光轴垂直的面,即与像平面平行,因此E’平面与像平面可用位移视差法。E’平面与E平面也存在相对关系,图中物平面上的P点投影到E’平面上为p点,即S、P、p在一直线上。
已知S的坐标为(0,0,z0),p的坐标为(x0,y0,0),则Sp直线方程为’平为标准,第二张相片与之作对比。当相片内物点有变形位移时,就会产生左右视差、上下视差。其本质是基于相机针孔成像的像平面和物平面的物体大小成线性关系。其变形量可按下式计算:面方程z=0,E平面方程为z=-ytanβ。

联立方程可得P点坐标:
采用vb语言编程,将大量数据输入,将所有测点各个时刻的坐标转换为实际坐标。
2.4 相机的畸变
当镜头质量不佳或使用视角较大的广角镜头时,在远离图像中心的边缘区域会形成较大的畸变[5-6],畸变误差可表示如下:

此影响可以通过对地面标志点进行修正,从而可以得到k1,k2等系数。标志点在试验时通过全站仪进行定位,得到地面标志点的精确坐标,从而得到修正系数。
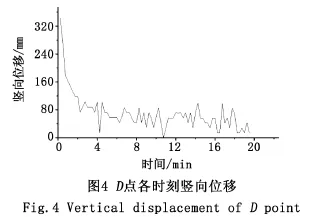
图4是D标志点在各个时刻的竖向位移,图5是P点在各个时刻的竖向位移,P点为D点附近一点,其数据是通过全站仪测量得到的,比较精确。D点数据是通过试验数据加后期理论处理得出。由于位置不同,及测量开始时刻不同,位移图会有偏差,但两图的趋势接近,故可以认为上述试验分析方法是可行的。

由图4、5可知充气膜结构在泄气初始阶段竖向位移很大,随着气压的降低,竖向位移逐渐平缓。测点在泄气过程中的位移情况大致符合理论规律。因此用单台相机测量大型结构在平面内动态位移的方法是可行的,测量的前提是必须保证位移在平面内。测量前的准备工作应做好,考虑必须周全。测点标志点大小应合适。标志点的大小应根据试验外部环境条件、相机像素及相机拍摄距离确定。在进行试验之前应做小测量试验来确定相机位置及标志点大小,以确保在试验中所有标志点都在相片内,并且都能被精确识别。测量时测点应在迎光面,这样可以保证光线充足,对后期数据处理时点的定位很重要,可以有较高的精确度。尽量使标志点在光心附近,因为相机成像时相片边缘处会产生畸变,对标志点的定位会产生影响。
3 结语
本次试验结果趋势与理论趋势符合,因此此试验方法与数据分析处理是可行的。当研究大型建筑动态监测时,无法用常规监测研究方法进行时,本文所述方法是可靠的,值得借鉴,但必须保证变形是在平面内的前提下。
[1]丁宭辋,刘友光.工程摄影测量现状及其发展趋势[J].勘察科学技术,1983(3):71-73.
[2]刘昌华.监测矿山井筒变形的摄影测量及其数据处理方法[J].焦作工学院学报,1997(16):6-10.
[3]丁宭辋,刘友光.工程摄影测量应用实例(Ⅰ)[J].勘察科学技术,1984(3):60-61.
[4]王汉章.近景摄影测量方法在桥梁动静载检测上的应用研究[D].吉林:吉林大学,2013.
[5]周拥军.基于未检校CCD相机的三维测量方法及其在结构变形监测中的应用[D].上海:上海交通大学,2007.
[6]胡亚江,沙月进.求解普通相机径向畸变系数的一种简便方法[J].测绘与空间地理信息,2009,32(5):182-183.
