智能小车相互超车的研究与设计
2015-03-05中南林业科技大学计算机与信息工程学院宾泽民吴舒辞
中南林业科技大学计算机与信息工程学院 宾泽民 吴舒辞
智能小车相互超车的研究与设计
中南林业科技大学计算机与信息工程学院 宾泽民 吴舒辞
【摘要】本文是基于“2011年全国大学生电子设计竞赛”C题智能小车展开的研究与设计。该系统主要由凌阳单片机小系统,超声波模块,无线模块,红外反射传感器st178等构成。超声波实时检测两车的距离,通过无线模块进行数据的传输,构成一个大反馈系统,实现两车协调行驶。在超车区域,超车车辆通过无线模块发出超车信号,实现超车。超车后,发送超车完毕信号给另一辆小车,结束超车过程。红外反射传感器能检测黑线,从而实现超车或转弯目的;当小车行驶到黑色边框线附近时,安装在两边的st178就能检测到,控制电机PWM调速,调整小车向远离边界线方向行驶,保证小车在正常轨道运行。
【关键词】凌阳单片机;超声波模块;无线模块;红外反射传感器
1 引言
智能小车是一个集环境感知、规划决策、自动行驶等功能于一体的综合系统,它集中地运用了计算机、传感、信息、通讯、导航、人工智能及自动控制等技术、是典型的高新技术综合体。
智能小车,在当今运用十分广泛,在军事上,能进行侦查以及排弹等任务。在民用领域,无人驾驶已经成为各车企研究的重点,然而智能小车是智能车辆的仿真车,是研究智能车辆的基础。在航天领域,它也扮演重要的角色,如我国“月兔”号探月车正在月球上执行各种任务。
本文研究并设计了两辆小车如何在无轨道的路线如何防止碰撞以及超车。该系统主要由凌阳单片机小系统,超声波模块,无线模块,红外反射传感器st178等构成。超声波实时检测两车的距离,通过无线模块进行数据的传输,构成一个大反馈系统,实现两车协调行驶。
2 系统总体方案
2.1 转弯模块
用PWM调速,当检测到标志线后,控制小车外轮比内轮速度大,当外轮比内轮多行驶38cm,就改变两个轮子的速度,使其一样。这样既能在不减速的条件下,实现转弯,节省时间,又能有效的防止两辆小车发生碰撞。
2.2 测距模块
采用超声波测距。12米范围内,超声波测距是目前已知的所有检测技术中最可靠的。超声波指向性强,能量消耗缓慢,在介质中传播的距离较远;超声波测距比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求。
2.3 标志线和边框检测模块
用ST178H2型光电对管[4]。ST178H2采用高发射功率红外光电二极管和高灵敏度光电晶体管组成;检测距离可调整范围大(4-10mm可用);采用非接触检测方式。采用ST178H2完全可以有效的降低干扰,而且方便可行,能够准确的实施检测。
2.4 电机驱动模块
采用电机专用驱动芯片L298N[1]。一片L298N能够驱动后轮的两个直流电机,其驱动电流能达到1.2A,且速度调节和转动方向控制方便,电路简单,使用方便。
3 硬件电路设计
3.1 主控制模块的总体设计
本系统由凌阳SPCE061A单片机作为控制核心,由IOB0~3连接驱动,控制电机运动;为了能实时的检测两车的距离,使用超声波模块,使能端EN接IOA6,接收端BACK接IOA5;采用无线模块实现两辆小车直接的通信,无线模块的CE,CS,DR1,CLK1,DATA1,DR2,CLK2,
DATA2分别接单片机IOB8~15;两个红外对管,输出端分别接IOB4~5,实现精确测速;小车前部中间装三个光电传感器,用来检测标志线,其输出的高低电平接单片机IOA0~1;另外车前的左右位置各装一个光电传感器,输出接IOA3~4,用来检测黑色边线,防止小车冲出跑道。总体设计图如图1[5]所示。
3.2 电机驱动电路
该驱动主要是通过SPCE061A单片机的I/O口,采用PWM调速,控制直流电机的加速、减速、正转和反转等功能。经分析可知小车的速度与脉宽成正比,所以单片机发出的脉冲信号的比即可决定PWM放大器输出的电压平均值的大小。
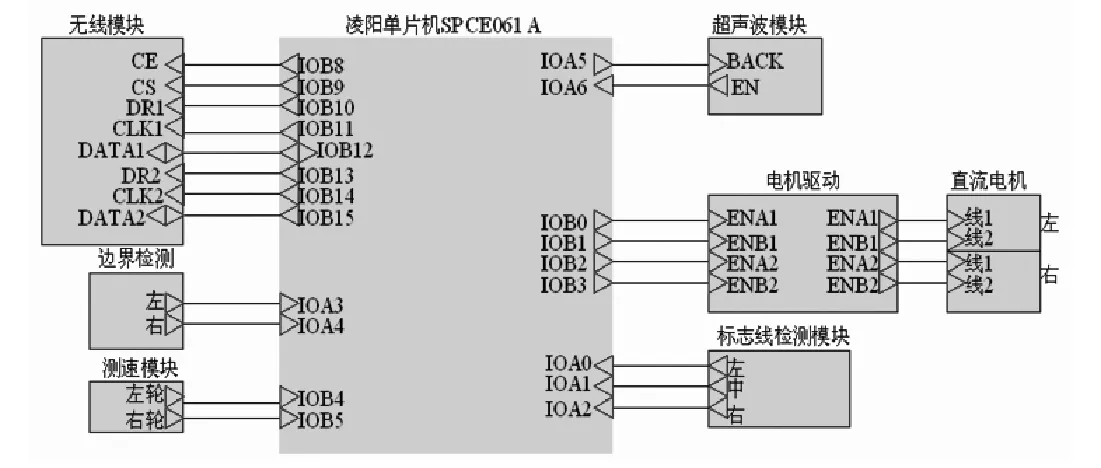
图1 主控模块电路图
3.3 黑胶带检测电路
红外反射传感器st178都装小车前部的左中右方向,左右位置各一个,中间位置三。各输出口分别与单片机SPCE061A的IOA0~4连接,高电平有效。
3.4 超声波电路
分别在两辆小车的前部各装一个超声波传感器[2],传感器的VCC和GND分别连单片机的正和负,使能端EN和接收端BANK分别连单片机的IOA6,IOA5。
3.5 无线传输电路
两辆小车上各装有一块无线模块,都是CE、DR2、CLK2、DATA2、CS、DR1、CLK1、DATA1分别连接在单片机的IOB8~15,PWR-UP和GND分别接单片机正和负。
4 软件设计
小车通过超声波模块检测距离,通过无线模块传输信号,两车构成一个大的反馈回路,实时的控制小车运动。甲乙两车流程图[3]如2、图3所示。
5 系统测试
5.1 测试工具
秒表。
5.2 测试步骤
(1)分别记录甲乙两车正常行驶一圈所用的时间s,如表1所示。
(2)乙车通过超车标志线后在超车区实现超车,并先于甲车到达终点标志线所用的时间s,以及此过程中发生碰撞的次数如表2所示。
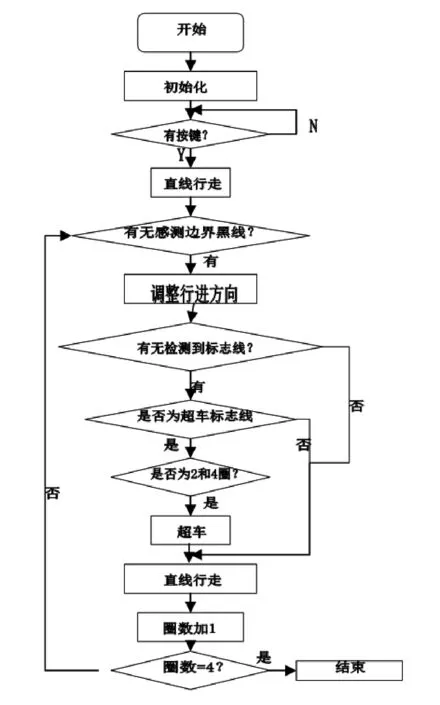
图2 甲车行驶流程图

图3 乙车行驶流程图

表1 行驶一圈所用时间

表3 跑完整个过程情形

表4 重新设置起始位置情形

表2 超车过车中运动状态
(3)甲车从起点标志线出发,两车交替领跑行驶四圈,分别记录每圈行驶的时间,总时间s,以及发生碰撞次数如表3所示。
(4)重新设定甲车的起始位置(在离起点标志线前进方向40cm范围内任意设定),实现甲、乙两车四圈交替领跑的记录如表4所示。
5.3 测试结果分析
从表一可知,甲乙两小车,行驶一圈的时间不同,主要是受电机的型号,车轮大小等方面因素影响。根据表格可知,每圈行驶的时间不同,这主要是因为小车每圈中行驶的路径的变化影响。在超车过程中,没发现两小车碰撞现象,说明小车的实行路径规划很好,以及防碰撞功能比较优异。
6 结论与总结
该设计要求路径规划比较好,利用反馈回路,使系统比较稳定,既能顺利完成超车,又不会发生碰撞,并在尽量短的时间内完成任务。由于采用的电机转速较小,要使小车在尽量短的时间内完成任务,小车行驶的速度就成为了瓶颈。
参考文献
[1]康华光,陈大钦.电子技术基础(模拟部分)(第四版)[M].武汉:华中理工大学出版社,2002.
[2]全国大学生电子设计竞赛组委会.全国电子设计竞赛获奖作品选编(2007)[M].北京:北京理工大学出版社,2008.
[3]徐士良.常用算法程序集(c语言描叙)(第三版)[M].北京:清华大学出版社,2004.
[4]黄智伟.全国大学生电子设计竞赛电路设计(第二版)[M].北京:北京航空航天大学出版社,2011.
[5]黄正瑾.综合电子设计与实践[M].南京:东南大学出版社,2003.
宾泽民(1990—) ,男,湖南株洲人,中南林业科技大学硕士研究生,研究方向:智能控制与自动化。
作者简介:
