某型自行高炮工况分析仪的设计与实现*
2015-03-04张振友王长升
赵 鑫,张振友,王长升
(防空兵学院,郑州 450052)
某型自行高炮工况分析仪的设计与实现*
赵 鑫,张振友,王长升
(防空兵学院,郑州 450052)
针对某型自行高炮缺少总线数据记录和分析手段的问题,基于双机分离、协议转换、时序分析等技术,实现了CAN总线数据实时采集、存储、转发、回放和时序错误监测;基于相关性分析实现智能故障定位,基于统计分析实现总线性能评价。为部队提高装备训练、维护水平提供了有力技术支撑。
CAN总线,自行高炮,数据采集,协议转换,相关分析,双机分离
0 引言
某型自行高炮是我军新型的防空武器,工况数据通过CAN总线进行传输。为满足装备工况的实时监测和事后故障分析的要求,通常采用工况记录(黑匣子)实时记录在线数据,为事后装备性能分析、故障诊断等提供依据。某型自行高炮底盘部分应用了数据记录与分析仪,但上装部分目前仍是空白。上装工况分析仪可对CAN总线数据实时获取、存储和远程监控;基于总线数据的时序分析,可对各节点时序故障报警;基于总线历史数据的分析,可进行故障智能定位、总线性能评价。
1 CAN总线数据分析
为实现CAN总线数据的实时采集和存储,需要首先对自行高炮的CAN总线布局、数据结构、发送策略进行分析,以确定数据采集算法。
自行高炮CAN总线采用CAN 2.0B标准总线协议,总线通信速率为500 kb/s,同步信号是RS-485规范的周期性方波脉冲信号。CAN总线分为两层,数据的发送策略较为复杂,其中一层CAN采用周期传输方式,二层CAN采用“发现即传输”方式,具有随机性,在采集算法设计时应充分考虑。
CAN总线数据帧为短数据报文,由帧起始、仲裁域、控制域、数据域、CRC域、应答域、帧结尾等7个位域组成,共132比特。
2 系统总体设计
系统包括主机及软件两部分。主机通过两根CAN数据线与自行高炮的中继测试盒相应接口连接,通过一根电源电缆与自行高炮备用电源电缆连接;当需要远程监控时,通过以太网口将CAN总线数据转发到远程监控计算机,系统连接关系如图1所示。

图1 系统连接示意图
系统主要具有CAN总线数据的实时采集与存储、各单体的在线时序监测、远程在线监测和存储、离线数据回放和曲线显示、基于离线数据分析的故障诊断和基于离线数据分析的总线性能评价等功能。
2.1 双机分离设计
为便于后期分析,系统要求在数据采集时记录采集时间,而CAN总线在高速运行时约0.26ms就会发出一帧CAN数据,常用操作系统的任务时钟难以满足加注时标的这一任务要求,而在实时取数的同时进行存储和转发就更为困难。

图2 工况分析仪主机逻辑结构
为解决这一问题,在工况分析仪主机设计中采用双机分离和并行工作的设计思想,如图2所示,下位机采用实时操作系统Free RTOS,利用实时任务调度时钟完成实时取数和加注时标任务,同时转发给上位机;上位机采用WIN XP系统,完成实时存储,同时利用剩余的计算资源进行数据时序分析和故障代码显示。
在实时数据采集算法中还有一个细节设计,由于自行高炮两层CAN总线采用不同的数据发送策略,如采用常用的中断方式采集数据,则可能产生两层CAN数据中断冲突,从而导致取数失败,因此,算法采用查询方式采集数据,保证实时数据采集不丢数。
2.2 CAN数据重构和协议转换
CAN数据帧采用的是一种短而快速的串行数据通信方式,因此,系统在进行实时数据采集设计时,利用Free RTOS较高精度的任务调度时钟进行数据时标加注;但系统设计中下位机和上位机的通信及上位机与远程监控计算机的通信若仍采用CAN总线传输,则必然给实时存储和远程监控软件的开发增加困难。

表1 CAN数据编码格式
为解决这一问题,下位机在数据采集后通过如表1所示的编码格式,按照CAN段标记域、标志域、数据域、时标域顺序将CAN数据和时标数据重新编码为20个字节,再按照两个CAN1、两个CAN2和一个时标的顺序重构为100个字节的UDP数据报文向上位机发送。通过任务的合理分配,实现了对短而快速的串行数据通信——CAN总线的实时处理,将其转变为较长而更加快速的串行数据通信——以太网数据传输,进而转变为数据量较大,但处理缓慢的硬盘数据读写操作,从而解决了远程监控和实时存盘问题。
在传输层采用无连接的UDP协议可快速建立连接,但也可能存在丢包和乱序问题,为此,系统采用冗余传输的方式解决丢包问题,采用验证时标计数的方式解决乱序问题。
2.3 数据相关性分析和故障定位
上装工况分析仪采集存储的CAN总线数据主要用于操作回放、状态监测和故障诊断,主机为满足实时取数、存储和转发功能需求,只做了分系统或装置的时序错误判断,主要的数据挖掘工作由远程监控计算机的离线分析程序完成。
离线分析程序对自行高炮方位角、高低角、航向角、纵摇角、横滚角、目标速度、斜距离等重要技术指标的多个相关总线数据输出进行曲线拟合和相关分析,形成关联数据约束规则,结合常见故障特征库规则,即可进行智能故障定位。
如搜索雷达、火控计算机、稳定跟踪伺服、受信仪、随动系统、方位测量装置、寻北仪、导航姿态等单体都会输出方位角信息,其中搜索雷达方位角βs、伺服方位角βt、随动受信仪方位角βsp、炮塔方位角测量装置测得的方位角βpt、火控方位角主令βtc满足以下限制:


Δ1为受信仪与炮塔方位角测量装置之间的测量误差;
Δ2为火炮随动误差;
Δ3为身管指向与搜索雷达电轴指向的误差;
Δ4为稳定跟踪器方位与身管指向的误差;
Δ5为火炮动态跟踪方位随机误差(均方差)。
3 硬件实现
上装工况分析仪主机由下位机、上位机、电源板组成,其内部组成如图3所示。
下位机主要由嵌入式单板机、双端口隔离CAN卡、时标接口板和CF卡组成。单板机上运行的是存储在CF卡上的Free RTOS操作系统,下位机利用北斗时标模块时间信息中的秒脉冲信号和绝对时标(RS-232信号)作为时间基准及粗分划,Free RTOS实时操作系统任务周期作为时间精细刻度分划,以精、粗分划组合读数为采集数据加注较高精度的时标信息。系统在每个任务周期通过CAN卡取出来自中继测试盒的两层CAN数据,送入编码模块。编码模块完成CAN总线数据到UDP数据包的转换,并通过以太网将其发送到上位机。
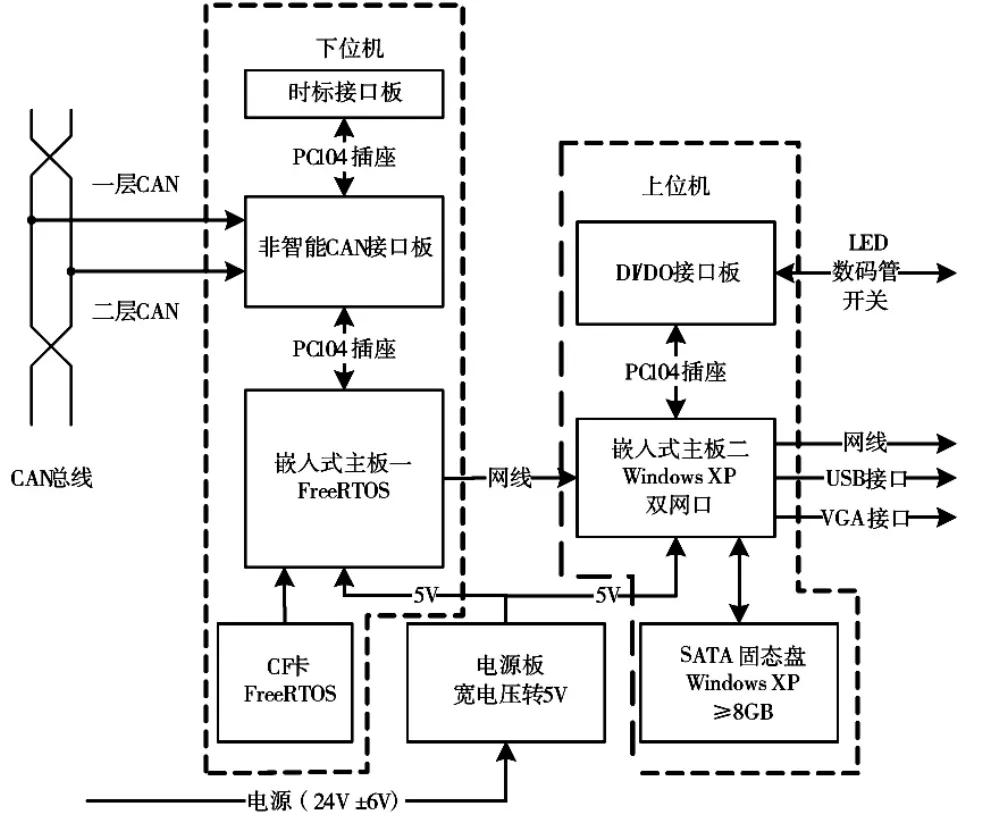
图3 工况分析仪主机内部组成
上位机主要由嵌入式单板机、SSD硬盘、数码显示板、I/O接口板等组成。上位机通过网线与下位机连接,采用XP操作系统。上位机利用双网卡将接收到的UDP协议数据包直接向外转发到远程控制计算机,同时通过解码模块对接收到的UDP协议数据包解码获取工况数据,进行存盘、计数和时序故障分析。
电源板通过一根电源电缆与自行高炮备用电源电缆连接,用于将自行高炮工作电源转换为系统所需的直流+5V工作电源。
4 软件实现
软件由运行于主机上数据采集软件和运行于远程监控计算机上的工况分析软件组成。
数据采集软件在工况分析仪主机的下位机Free RTOS系统和上位机WINXP系统上运行,包含Free RTOS系统CAN卡驱动和网络编程支持模块、CAN总线数据读取模块、北斗时标模块、数据编码模块、数据监测模块及数据存储模块等。数据采集软件流程如图4所示。
首先将DOS下的CAN接口驱动及基于Packet Driver的socket编程方法移植到Free RTOS系统中,使其支持CAN卡编程和UDP网络通信;CAN总线数据读取模块主要针对双端口隔离CAN卡中CAN控制器SJA1000的连接原理进行程序设计,通过每个Free RTOS系统任务周期执行两次查询取数操作,确保完整获取CAN总线数据;北斗时标模块读取北斗时标数据用于后续时标计数;数据编码模块用于解析CAN数据帧标志、数据域,存入缓存并把当前实时调度任务的时钟计数值附加到缓存区的时标字段,重构为较长的以太网数据帧;数据监测模块用于解析以太网数据帧进行计数,并按各分系统或装置时序规则判断时序错误,将计数及时序错误信息显示在LED显示屏上;数据存储模块用于存储CAN数据及实时时标信息。

图4 操作程序流程图
上装工况分析软件(组成如图5所示)在远程监控计算机上运行,主要分为在线监测和离线分析两部分。
分析软件的在线监测主要由4个子模块组成。状态显示模块用于监控单体工作状态数据;操作监视模块用于检测操作手是否按正确的操作顺序和参数设置要求进行装备操作;实时数据模块是为了指挥员和技术人员能够准确掌握主要单体的运行数据参数和系统轴系的一致性进行数据选取输出;时序监测模块用于检测CAN总线上各单体的工作时序,与上位机中数据监测模块功能相同。

图5 离线分析程序组成
分析软件的离线分析主要由5个子模块组成。数据文件解析模块将数据存储文件提取到计算机内存中,并进行文件格式转换,以便进一步分析;操作数据回放模块将操作手主要操作按时标信息以文字形式回放;操作数据显示模块将CAN数据以文本文件形式打开,以便进行具体分析;故障诊断模块对各单体之间相关数据进行对比分析,通过阈值判断等方法确定是否有故障或工作性能是否符合设计要求;性能评价模块对两层CAN总线中各单体的工作性能进行分析和评价。
5 系统应用
系统已应用于部队训练,并对装备维护水平的提高起到了积极作用,本文通过一次故障定位实例加以说明。
故障现象:身管高低抖动。
故障分析与定位:
第1步,导入数据。将故障前1 h到发生故障时采集数据导入离线分析程序,图6给出了各单体在同步时统序号为8 000附近时的数据曲线;
第2步,分析定位。系统基于知识库和数据相关性约束规则,对身管数据相关单体进行数据检查。按照关联顺序依次检查受信仪高低角、火控随动主令高低角、搜索雷达高低角、雷达红外电视测角、激光雷达测距、火控解算数据。检查中发现受信仪高低角、火控随动主令高低角数据在同步时统序号为8 000附近有抖动,但搜索雷达高低角无抖动,说明目标飞行稳定;进一步检查激光测距机的输出数据在同步时统序号8 000时为0,通过查看激光测距机状态信息码,最终系统自动得出故障原因是激光测距机因超时工作而自动停机。
这一故障排查过程自动完成,并最终输出准确的故障定位,显著提高了装备智能故障诊断的自动

图6 名单体在同步时统序号为8 000附近时的数据曲线化水平。
6 结束语
系统创造性地应用双机分离设计思想,综合采用实时操作系统、CAN总线-以太网网络协议转换技术、时标技术、相关性分析技术等方法,有效解决了CAN总线数据实时提取、存储困难的问题;通过对各节点时序的自动监听,及对总线历史数据的分析,实现了对上装各单体的总线性能评价和智能故障定位,为装备维护保养、训练评估、故障诊断提供了有力的技术支撑手段。
[1]闵华松.以太网CAN总线转换器的延时特性分析及设计[J].计算机工程与设计,2012,33(2):503-507.
[2]宫筱霞.基于CAN总线的智能多参数监控系统[D].镇江:江苏科技大学,2010.
[3]杨晔.多通道CAN-Ethernet嵌入式网关的设计与实现[D].苏州:苏州大学,2010.
[4]汪保男.相关分析在异常检测中的应用研究[D].西安:西安科技大学,2010.
[5]孙兵.基于DSP的CAN总线与以太网互联系统研制[J].仪器仪表学报,2008,29(2):377-380.
[6]赵浩.基于CAN总线和以太网的远程监控系统设计[J].测控技术,2006,25(10):53-56.
A Design and Im p lementation of Artillery Condition Analyzer
ZHAOXin,ZHANGZhen-you,WANGChang-sheng
(Air Defense Forces Academy,Zhengzhou 450052,China)
The work condition analyzer is designed against the problem that the methods of bus data recording and analysis in the self-propelled antiaircraft gun are lacked.It implements real time collection,storage,relay,replay and time series mistaken monitoring,based on the technologies of double engine cooperation,protocol conversion,time series analysis.It can achieve bug location and property evaluation based on relevance analysis and statistics analysis.It can offer powerful technology support improving the equipment training and maintaining level.
CAN bus,self-propelled antiaircraftgun,data acquisition,protocol transition,correlation analysis,doubleengine cooperation
TJ393
A
1002-0640(2015)11-0159-04
2014-09-05
2014-11-02
军队技术革新项目
赵 鑫(1979- ),男,山西长治人,博士,讲师。研究方向:自行高炮,网络安全技术。