静重式力基准机砝码组合算法及其对测试加载过程的影响分析
2015-02-24庞乃贞黄盼陈守强刘华林
庞乃贞,黄盼,陈守强,刘华林
(西华大学机械工程与自动化学院数控研究所,四川成都 610039)
0 前言
静重式力基准机是利用力学传递效应,将标准砝码的力值直接复现在被测传感器上,通过与传感器的示值进行对比和标定的基准机。静重式力基准机的工作原理如图1所示。
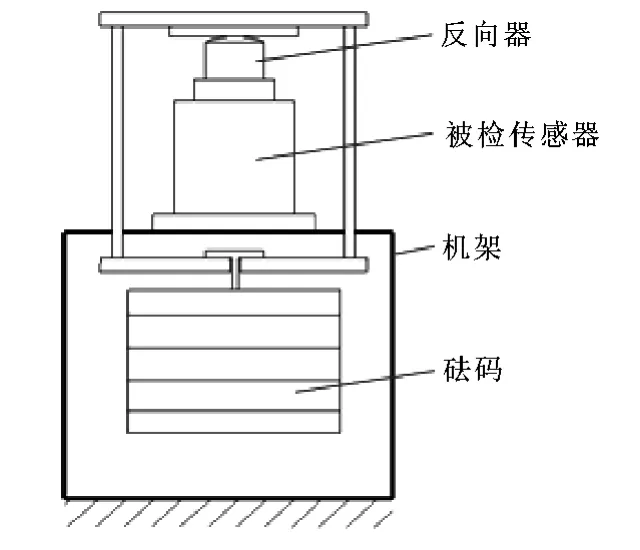
图1 静重式力基准机工作原理图
从静重式力基准机的工作原理可以看到,静重式力基准机的砝码数量是有限的,根据测试的要求,需要把不同大小的力值加载到被测传感器上,就必需在有限数量的砝码中选择一定数量的砝码进行组合,而进行砝码组合时,不同的砝码组合出来的力值可能相同,那么反过来相同的组合力值也可能对应不同的砝码组合。因此,当同一个力值会有不同几种砝码组合的时候,应该建立一种标准来判断使得最终只得出一种最优的组合,便于计算机明确地对相应的砝码进行控制。这种最优组合应该满足对加载速度最快、对精确度的影响最低同时对加载稳定影响最小。为此研究砝码组合算法和最优组合在重式力基准机测试中具有重要意义。
1 力值组合算法的分析
从n个砝码中取出m个来组合成力值,而且m从1到n变化,这类似于“背包问题”,在此采用一种基于二进制编码的组合力值算法。其思路是将各个砝码的重力值按从第1号砝码到第n号砝码的顺序放在一个数组w中,对应砝码的个数建立一个n维数组wi,数组w中的元素只能取0和1,其中1代表砝码取出来进行组合,0则代表不取出来组合[1]。例如wi(i)=1,那么就是第i号砝码要被取出来进行组合。例如在100 kN静重式力基准机中砝码中心杆吊挂装置[2](0#砝码)和各个砝码的力值如表1所示,假设现在wi=[1 0 1 0 1 0 0 0 1],则代表1号砝码、3号砝码、5号砝码和9号砝码被取出来组成集合,而组成的其组合力值为:


表1 100 kN静重式力基准机砝码力值表
为此得出关于砝码组合的二进制算法,其程序算法框图如图2所示。
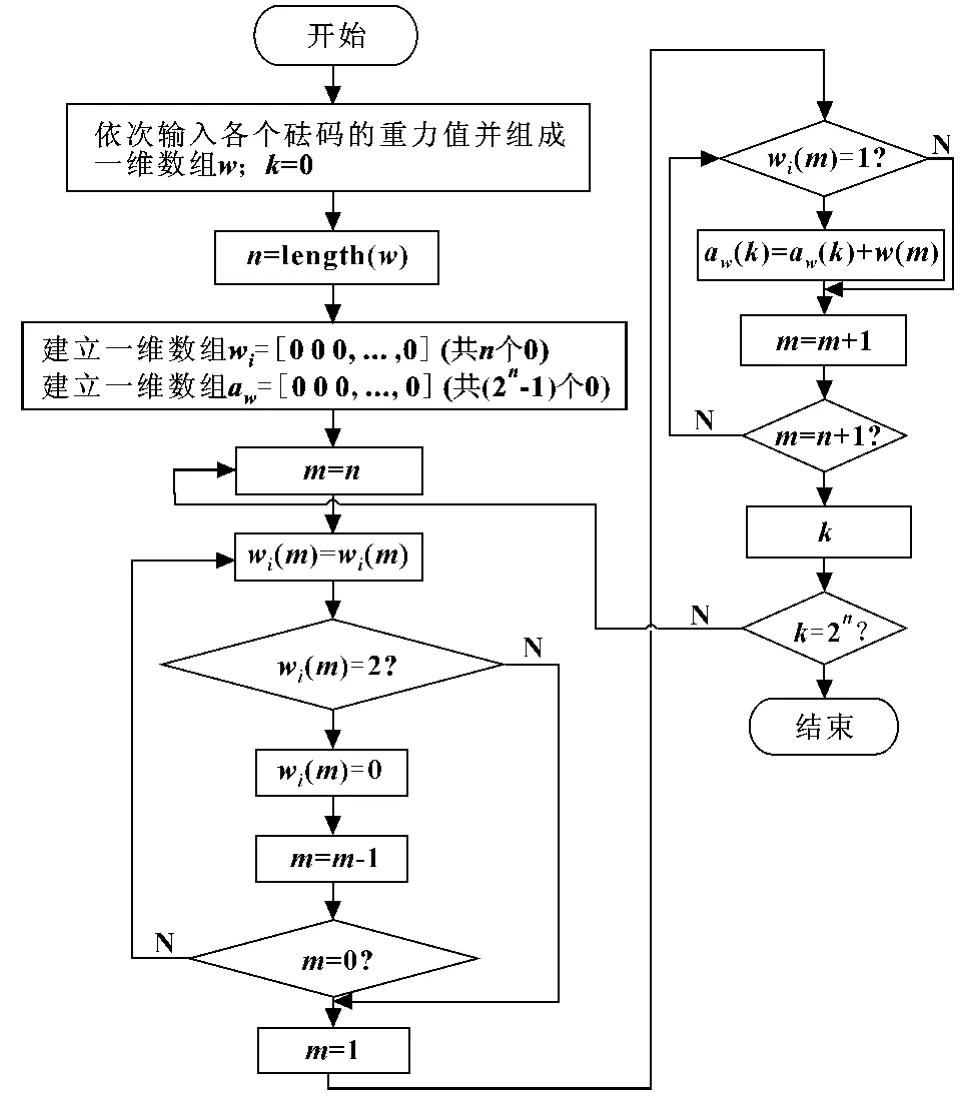
图2 砝码组合的二进制算法
2 砝码组合算法分析
2.1 力值筛选的算法分析
通过二进制编码的方式,可从n个砝码中把所有的砝码的组合形式组成的力值全部找出来并存放在数组aw中。通过上面的分析知道数组aw中存放着2n-1个力值,而这2n-1个力值存在重复,因为不同的组合情况也可能得出相同的力值,这就要求对aw中的数据进行筛选,将相同的力值只保留一个,其余相同的滤掉,最后得出一个拥有所有不同力值的集合,为此首先得知道整个砝码可以组合出多少个不同的力值。
根据分析,砝码组合力值的筛选算法分为以下两步来做:首先从1到2n-1逐个取组合力值数组aw中的力值,对于每次取到的砝码组合力值aw(i),都将它和后面2n-1-i个力逐个进行比较当发现后面的2n-1-i个数中某个力值aw(k)和aw(i)相同的时候将aw(k)置为0,这样在aw中每个力值都取出来和后面的数进行比对之后再统计aw中为零的值的个数c,然后非零值的个数就等于2n-1-c,这样我们就可以建立一个大小为2n-1-c的一维数组uniqaw来专门存放aw中筛选出来的所有不同的组合力值。
2.2 力值排序的算法分析
通过力值的比较和筛选得出了砝码组合出来的所有不同的力值,从而实现了在给定力基准机每个砝码的重力值的情况下获得基准机能够组合出来的所有力值,明确了基准机的检测范围。但是为了在后续工作中能够方便力值的查询和调用,需要对所有的力值进行排序,在此选择从小到大排序的方式。文中基于冒泡法的算法原理,采用改进的冒泡法,在要比较的数据范围内找出最小值,就将比较范围内的第一个数赋值给临时变量temp,再利用temp的值和每一个数据都比较一次,在比较过程中如果有力值比temp的值还要小,则把这个值赋给temp变量覆盖原来的值,记录下最小值的位置,对比完后temp的值就是这个范围内的最小值,而最后一次记录的位置就是最小力值在数组uniqaw中的位置,将第一个值赋给最后记录的位置的数,再将temp值赋给第一个值实现了最小值的交换。关于改进冒泡法的算法原理如图3所示。
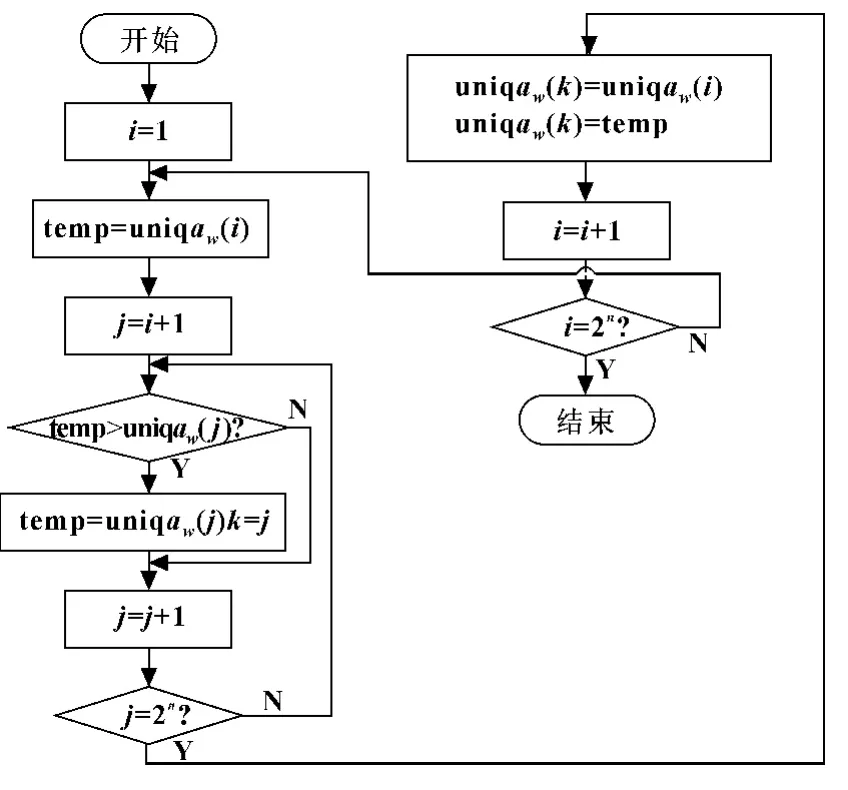
图3 改进冒泡法的算法原理
2.3 砝码交换的算法分析
上面已经通过组合、筛选、排序和根据组合出来的力值反算对应砝码的最优组合得到了所有组合的Excel表格,利用这样的表格,可以判断出基准机在确定砝码数量和对应的重力值后,就可以明确基准机力值的检测范围和对应力值的组合[3]。同样,采用二进制编码相减的算法,对应要加载的力值,设要加载的砝码其对应编号为1,无需加载的砝码对应0,这样可以将下一个力值对应的编码和当前力值对应的编码进行相减,得出的编码如果是1,则代表该砝码需要加载;如果为0,则不需要改变砝码状态;如果是-1,则意味着该砝码需要卸载。以当前力值85 kN加载到下一时刻90 kN为例进行说明,其交换算法示意如图4。
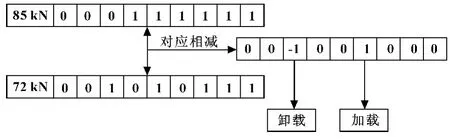
图4 砝码交换算法原理图
可以找出其中的二进制编码对应72 kN和85 kN的编码方式。通过分析算法,得出从72 kN加载到85 kN只需要3号砝码卸载和6号砝码加载,这与实际应用相符合,从而说明算法的可行性。
3 组合砝码加载的影响
由前面的分析得知,不同的砝码组合出来的力值也可能相同,那么,反过来相同的组合力值也可能对应不同的砝码组合。因此,当同一个力值会有不同几种砝码组合的时候,应该建立一种标准来判断,使得计算程序最终只得出一种最优的组合,便于计算机明确地对相应的砝码进行控制。这种最优组合应该对加载速度最快、对精确度的影响最低,同时对加载稳定影响最小。砝码在加载过程中不可避免地产生位置的微小偏移,进而出现轻微的摆动现象[4],其简化模型可以简化成如图5所示。
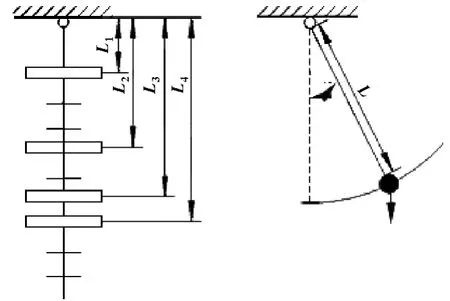
图5 砝码摆动分析简图
假设某一时刻加载砝码的组合情况如图5中左边的图所示,简化摆动模型后把加载上去的几个砝码组成的质点系的质心等效于图5中的右图所示黑点,。砝码在摆动过程中会受到空气等阻力,所以砝码属于欠阻尼运动。根据D'Alembert原理建立砝码摆动的微分方程如下:

式中:φ代表中心吊杆的摆动角度;μ表示阻尼系数;g为砝码所在地的重力加速度;m和l分别代表等效质量和等效摆长。通过求解式 (2)中的微分方程,可得出其解为:

则根据式 (3)可以得出砝码摆动的周期曲线图大致如图6所示。
从图6中可以看出摆动角度随时间的变化不断衰减。事实上每个周期振幅的衰减是成等比级数衰减的,其比例系数计算如下:
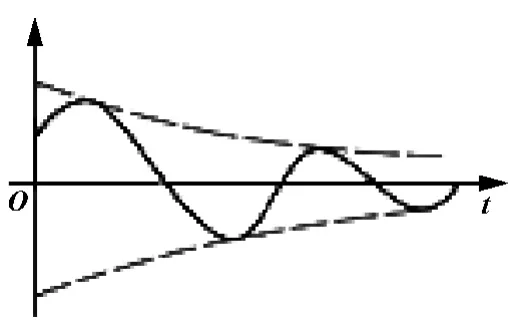
图6 砝码摆动曲线图

要提高加载时的稳定性,则摆动的次数越少越好,即每摆动一个周期,振幅衰减越多越好。由式(4)可知,增加周期可以减少摆长次数,减小振动频率可以增大周期。则由g/L=ω2可知,只有减小等效摆长L才可以使得ω的值减小,从而缩短砝码摆动的周期,减少摆动次数。
通过分析等效摆长的计算公式,找出了同一个加载力值可以有几种砝码组合情况与之对应的时候,选择最优砝码组合的原则,那就是选择一种砝码组合,使砝码组成的质点系的质心到传感器顶端的距离最小[5]。也就是说对应某一个加载力值,从上到下选择砝码来组合起来,首先看加载的力值是否大于或者等于第n号砝码的重力值,如果是大于或者等于,那么先把第n号砝码选择上,然后再看剩下的力值是否大于第n-2号砝码的重力值,大于则选上,如果小于,那么再判断第n-3号砝码,以此类推直到最终剩下的力值为0。
4 结论
通过对有限个砝码力值组合、筛选、排序和交换的理论分析,得出了其各自算法流程图;根据具体力值反算出砝码的不同组合;利用改进冒泡法确定了最优砝码组合的方法,实现了计算机更明确地对相应的砝码进行控制,并通过重式力基准机的砝码加载具体的实例分析,验证了该砝码组合算法的可行性。实际使用证明,这种砝码组合算法和最优组合能够达到测试过程加载速度最快、对精确度的影响最低,对加载稳定影响最小的实际效果,在重式力基准机测试中具有重要的应用价值。
[1]于立娟,张学成,马雁,等.静重式力标准机控制系统的设计[J].仪表技术与传感器,2005(3):31-33.
[2]兴佰明.力标准机平滑加载系统应用研究[D].成都:西华大学,2009.
[3]唐纯谦.力值计量标准现状及研究进展[J].中国测试,2009(5):11-16.
[4]康博.力基准机独立连续加码方法及装置的研究[D].成都:西华大学,2010.
[5] SHA Shujing,ZHANG Xuecheng.Research on the Value Control of Norm Force Machine Based on Fuzzy Control[C] .2011 International Conference on Mechatronic Science,Electric Engineering and Computer,2011:232-234.
