基于SolidWorks 的三菱工业机器人虚拟工作站构建
2015-01-23□隋欣
□隋 欣
一、引言
自从20世纪60 代世界上诞生第一台工业机器人起,工业机器人就以其独特的魅力逐步征服人类,它们越来越多地活跃在国民生活中的各个层面。截止到2012年,全世界每一万名工人中,机器人的装备量世界最多的韩国可以达到347 台,日本达到339 台,世界平均水平是58 台,而我国仅为23 台。随着中国人口老龄化的到来,根据相关统计到2050年,中国65 岁以上老人数量将达到总人口的三分之一,适龄工作人口对重复的枯燥的劳动越来越没有兴趣,劳动力资源的短缺不可避免将会在中国出现。被称作中国版的工业4.0 计划《中国制造2025》中强调中国制造业要完成从“制造”到“智造”的转型。因此在我国大量引进机器人完成相关产业的升级换代变得势在必行。工业机器人的成本较高,一台的成本在20 万元左右,因此教育领域不适合大量引进机器人供学生人手一台实际操作学习,通过建立工业机器人的虚拟工作站采用虚拟真实机器人工作站的形式可以满足绝大多数工业机器人指令的学习使用。本文基于教学目的,通过SolidWorks 和作为其插件的MelfaWorks 建立了三菱工业机器人RV -3SD 的虚拟工作站,并且通过使用RT ToolBox 软件编程在所建立的虚拟工作站中完成了3* 4 形式的码垛作业,验证了所建立的虚拟工作站完全可以满足教学使用要求。
二、建立虚拟工作站
(一)系统构成。
1.装配机器人。通过Melfaworks 导入三菱RV -3SD 型机器人本体,这是一个额定载荷为3 公斤的垂直多关节机器人,广泛应用在机械、电子等装配领域中。它由腰部、肩部、上臂、肘部、前臂、手腕构成,共有6 个自由度,通过机械臂的前后、左右以及转动等运动配合安装上的抓手可以完成三维空间内的物体的抓取、搬运等操作。
2.基座。通过SolidWorks 导入一个圆柱形基座,并在基座上建立坐标系,坐标系位于圆形表面中心,并确保Z 轴坐标朝向外侧。对基座的文件命名规则上没有要求,它的主要作用是固定机器人本体,在工厂中机器人本体都是通过基座固定在地面上。
3.抓手。虚拟工作站的抓手也是通过SolidWorks 导入的。真实的抓手有气动和电动两种形式,气动形式的抓手相对简单,价格也比较便宜,应用最为广泛。虚拟抓手没有气动和电动之分,但是为了装配和抓取物件的需要,在它的上面需要建立两个坐标系,分别针对装配机器人手腕和待抓取的物件。为了使Melfaworks 能够识别SolidWorks 建立的抓手文件,虚拟抓手文件名应遵循xx_Hand 形式。
4.工件。由于最终要完成3* 4 的码垛作业,因此需要通过SolidWorks 导入12 个外观完全一样的待加工物件。在工件上,应建立一个针对抓手抓取部位的坐标系,确保坐标系的Z 轴朝向工件内部,否则抓手抓取时会反向抓取物件,虚拟工件名称应遵循xx_work,否则将不被识别。
5.传送带、工作台和托盘。传送带、工作台和托盘都是对整个虚拟工作站项目的待操作物件起到支撑作用,对于它的命名规则没有要求,由于它们也不需要和机器人本体进行装配,因此也不需要在其上建立坐标系。根据项目要求需要建立一条传送带台,用来模拟传送过来的代加工物件,还有一个工作台用来安放托盘。
(二)装配。将已经建立好的机器人基座、抓手、待操作工件、传送带、工作台和托盘装配到一个工作站中,并调整好相对位置,调整完毕的虚拟工作站如图1 所示,12 个物件重叠在一起,此处模拟传送带每次传送一个待加工物件,并且每次传送过来的工件停在传送带的相同位置。
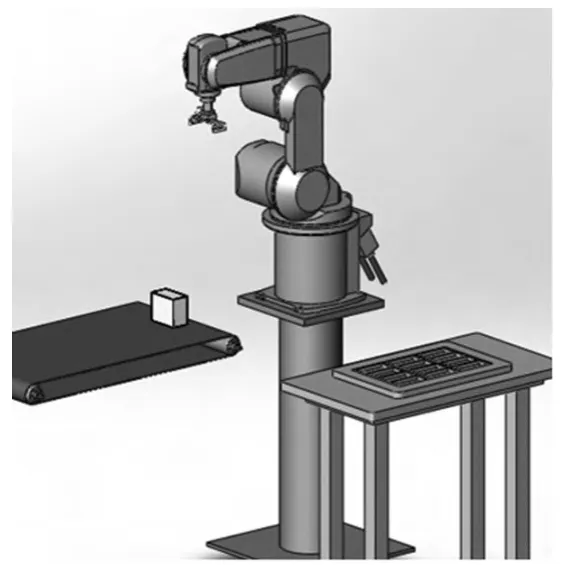
图1 虚拟工作站
三、码垛的实现
(一)码垛定义。在现代工厂中,都离不开自动化立体仓库的使用。自动化立体仓库的搬运作业,又离不开自动化控制的码垛机器人的使用。码垛指令的功能是使待搬运物件从一个位置按照一定的轨迹搬运到所定义的托盘的过程。它的定义如下:
Def Plt <托盘号码>,<起点>,<终点A >,<终点B >,[<对角点>],<个数A >,<个数B >,<托盘模板>
其中:
<托盘号码>:选择已设定的托盘号码(只有1 ~8 的常数)
<起点>:托盘的起点
<终点A >:托盘一边的终点
<终点B >:托盘另一边的终点
<个数A >:起点到终点A 之间的待搬运物件个数
<个数B >:起点到终点B 之间的待搬运物件个数
<托盘模板>:一般设定为1,表示Z 字型搬运,姿势等分割。
由于大多数仓库使用的托盘形状均为矩形,因此本文也完成对矩形托盘Z 字型3* 4 形式的码垛作业,所以最终码垛托盘的最终定义形式如下:
Def Plt 1,P10,P11,P12,P13,3,4,1
其中P10 代表图中码垛托盘的左上方的点,P11 代表码垛托盘左下方的点,P12 代表码垛托盘的右上方的点,P13 代表码垛托盘右下方的点。
(二)编写程序。通过RT Toolbox 编写程序,按照图2 顺序进行。为了对机器人进行轨迹规划,需要校验以下行进过程中的关键点,数值如图3 所示,其中P0 表示机器人的退避点,P1表示待抓取物件在传送带的位置,P10、P11、P12、P13 表示码盘的四个顶点的位置,P100 是码盘上1#物件放置位置。

图2 程序编写流程图

图3 轨迹关键点校验
(三)启动虚拟工作站中的机器人系统并开始码垛作业。得到结果如图4 所示。

图4 码垛作业结果
四、结语
通过SolidWorks、MelfaWorks 以及RT ToolBox 软件的结合使用创建的机器人虚拟工作站可以满足日常教学使用,在最大程度上模拟了真实的机器人控制系统。在教学资源不足或者成本巨大的情况下,通过虚拟仿真的方法可以较小的代价完成教学任务。并且,在虚拟环境下进行实验结果的仿真,然后移植到真实的操作环境中进一步调试也符合时代主流。
[1]李云江.机器人概论[M].北京:机械工业出版社,2012
[2]吴振彪,王正家.工业机器人[M].武汉:华中科技大学出版社,2006
[3]吴广顺,凌雷,方索香. PLC 在搬运机器人系统中的应用[J].机床与液压,2006,2:188 ~190
