巡检机器人越障运动学分析及仿真
2015-01-21赵建伟张云龙商德勇
赵建伟,张云龙,商德勇,刘 娜,范 迅
(中国矿业大学(北京),北京 100083)
0 引言
目前煤炭行业进入严冬状态、煤炭价格整体跳水、煤炭储量严重过剩等问题严重影响着各个地方的煤炭企业。对于薄煤层的自动化开采,因为煤层的开采厚度低,与中厚及厚煤层相比,薄煤层的机械化长壁开采工作面存在一些缺点。薄煤层采高低、开采环境条件差、采煤设备移动困难,尤其是在综采工作面,当其最小开采高度降到一点二米以下时,工作人员进出工作面和在工作面进行劳动是非常困难的,同时,薄煤层采掘比大,开采工作面工人接替也很紧张。目前随着长壁机械化开采技术的发展,采煤工作面的推进速度加快。但由于薄煤层开采工作面的回采巷道是半煤岩巷道,在巷道的掘进方法上面却没有多大的变化,依然是应用打眼放炮、人工装煤,这样导致掘进速度变慢。应用综采设备开采薄煤层,设备投资大,开采量和开采效率不高,只有中厚煤层和厚煤层综采工作面的一半左右,其经济效益远远不如开采厚及中厚煤层。
在薄煤层开采中,由于薄煤层开采厚度小,其开采设备在安装、操作、维护等方面比中厚及厚煤层难度较大。由于薄煤层空间的限制,工人在进出通道和在工作面工作都受到限制,在正常倾角下薄煤层的开采垂直高度远远低于正常人的身高,加上开采设备占用的高度,工人在进入工作面活动十分困难。这样工作效率低且长时间下去对工人身体造成危害。因此需要一种安全性高且可靠性强的移动式机器人,在工人无法工作的环境中代替工人完成对设备的监测与维护工作[1]。为解决上述等问题,本文提出一种用于薄煤层工作面设备安全监测、巡检的移动机器人。
1 机器人的结构设计
薄煤层矿井的井下工作环境是极其复杂的地形,一般包括斜坡,凸台,壕沟,等地形或是可以由上述三种地形综合构成。煤层巡检机器人主要是在煤矿开采工作面进行巡检工作,需要巡检机器人通过遥控或是自主的完成避障和跨沟等动作。目前,轮式机器人,履带式机器人,腿式机器人都是具有复杂地形适应性的移动机器人,这三种移动方式各有其实用性和优势,但也同时存在相应的一些缺点。
轮式机器人具有速度快、结构简单、效率高等优点,适合在平坦的路面行走。但是不适合壕沟、凸台等地形,越障能力不及履带机器人;履带式移动机器人优点在于机动性能好、越障能力强,能在陡峭地形、复杂环境下有着较高的越障能力和适应性,缺点是机械结构相对复杂、机械传动效率低、与地面摩擦阻力大、机器人整体质量大。腿式移动机构的移动速度慢,整体质量较大,转弯灵活性低、机动性差,因此该类机器人的负载低,要想实现稳定高速的行走,还有诸多难题需要解决[2]。
综上所述,根据薄煤层开采工作环境,选择履带式移动机器人作为设计首选。目前国内外对履带式移动机器人研究的有很多,技术成熟的比如美国Foster-Miller公司研制的Talon 机器人[3-8],中国矿业大学研制的CUMT矿用救灾机器人[8],日本研究的HELIOS 系列履带式搜索机器人[9],美国i Robot 研究的摆臂式Pack Bot 机器人,哈尔滨工业大学机器人研究所研制的煤矿搜救机器人[10]等。通过对不同的履带式移动机器人的分析研究,考虑到薄煤层开采环境的特殊性,制定机器人的形成参数如表2 所示。
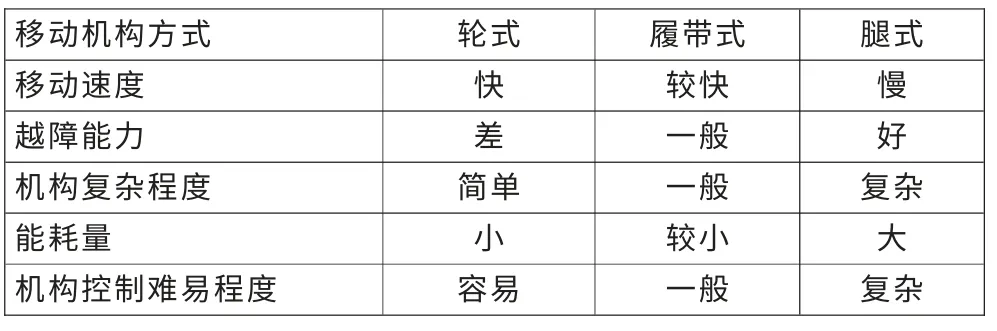
表1 移动机构的优缺点Tab.1 The advantages and disadvantages of mobile mechanism
根据以上设计要求,本文设计的六履带式移动机器人的基本结构如图1 所示。从图中可以看到机器人主要由箱体、主驱动组件及摆臂三部分组成。箱体中包括控制系统、信息采集系统、动力系统。主驱动组件包括主驱动轮、从动轮、主履带。摆臂包括摆臂驱动轮、张紧轮、连板、摆臂履带。
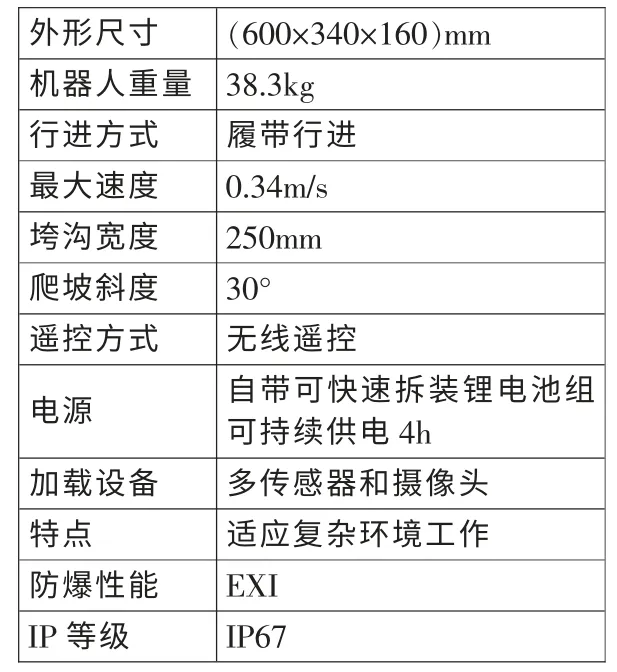
表2 机器人性能参数Tab.2 The performance parameters of the robot
2 运动学分析
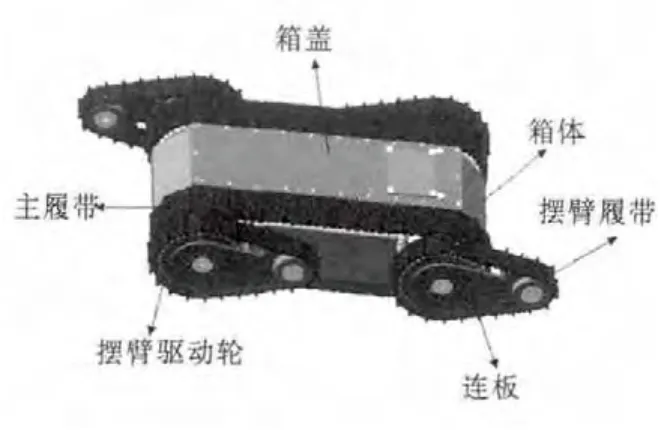
图1 机器人总装图Fig.1 Robot assembly drawing
机器人由六个履带构成,结构复杂,左右对称,可将机器人各关节当刚体处理。建立机器人姿态模型坐标系 应用机器人学中的D-H 坐标变化方法,分别以机器人的关节转轴为原点建立坐标系。
设机身质量为m1、前、后摆臂质量为m2;机身质心位置为LC1,摆臂质心位置为LC2;机身长度L1,前、后摆臂长度为L2;r1,r2分别表示大轮、小轮直径。设垂直障碍高度为h,后摆臂与地面接触点到垂直障碍的距离为c。以机器人的关节转轴的原点为坐标系的原点建立坐标系。以后摆臂小轮与地面接触点为原点建立固定坐标系x0y0;以机身驱动轮转动中心建立机身坐 标 系x1y1z1;以 前摆臂转动中心建立前摆臂坐标系 x2y2z2;以后摆臂转动中心建立后摆腿坐标系x3y3z3。如图2 所示。
机器人越垂直障碍时ψ=0,φ=0。机器人前摆臂与后摆臂相对机身坐标系x1y1z1的变换关系如表3 所示。机器人各个关节齐次变换矩阵T 为:
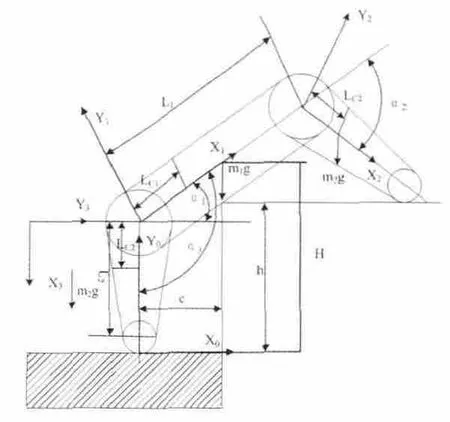
图2 机器人越垂直障碍位姿Fig.2 Across vertical obstacle the robot posture

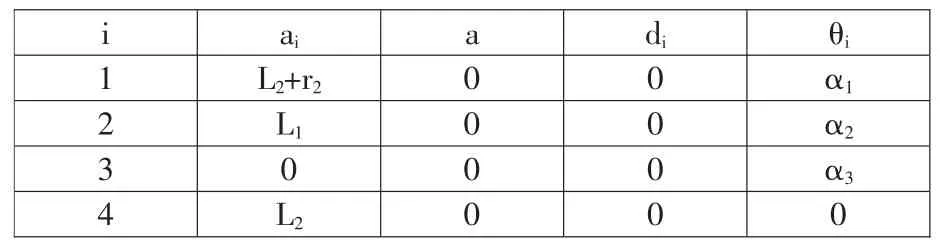
表3 机器人越障坐标系变换关系表Tab.3 Over- obstacle coordinate system transformation
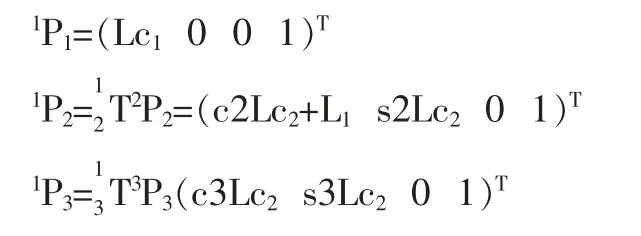
式中c、s 分别代表cos、sin。机器人的质心位置:各关节质心位置坐标用1P1,2P2,3P3表示,则:

各关节质心位置相对坐标系x1y1z1的表示为:
整体质心:

式中m=m1+2m2为机器人的质量,得质心1P 和0P:
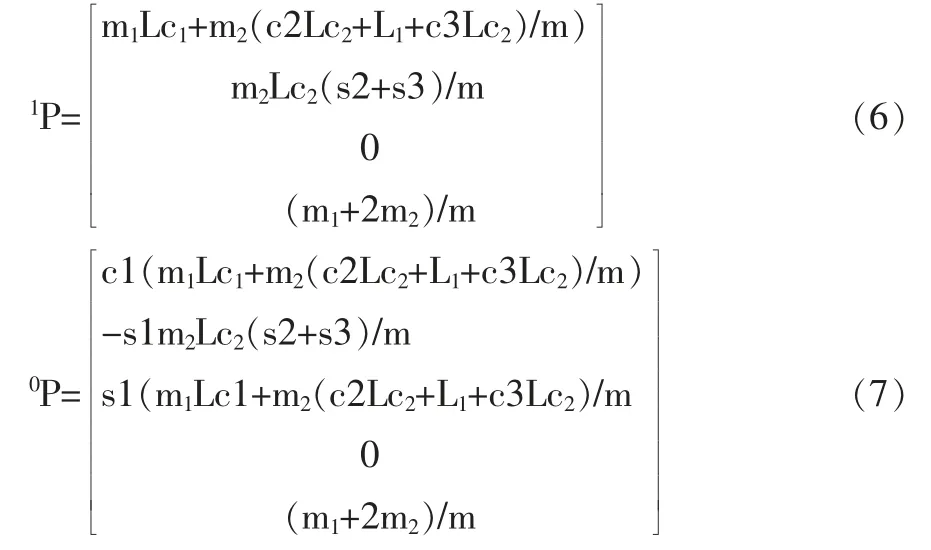
式中可以看到相对于坐标系x0y0的机器人质心位置:

带入机器人设计参数得到机器人质心位置方程:
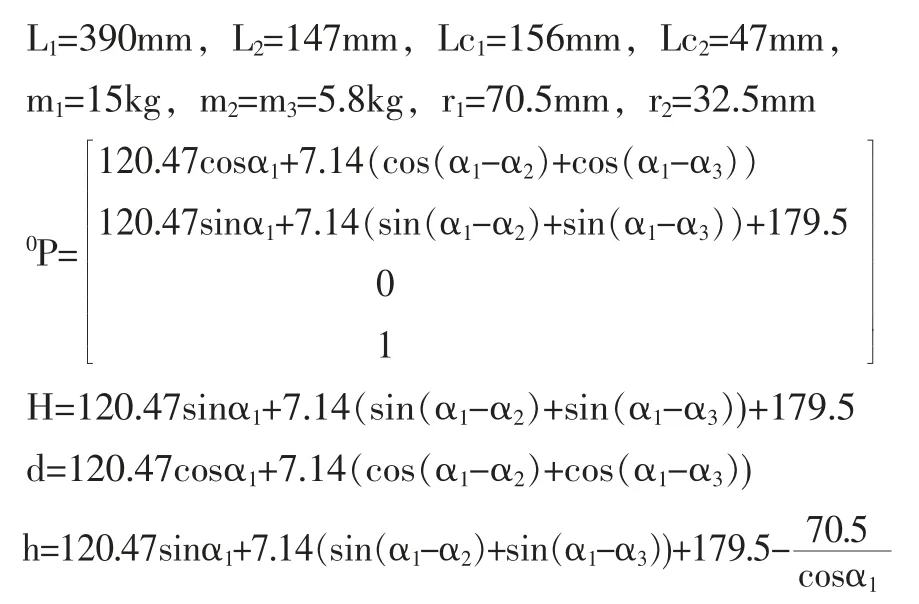
通过测定α1,α2,α3就可以确定机器人的质心位置。通过Matlab 软件对方程求解得到机器人越垂直障碍高度Matlab 曲线如图3 所示。图中分析得到机器人理论越障最大高度为160mm,此时机器人后摆臂与垂直障碍之间的最小距离为70mm,且此时α3=α1+90°。
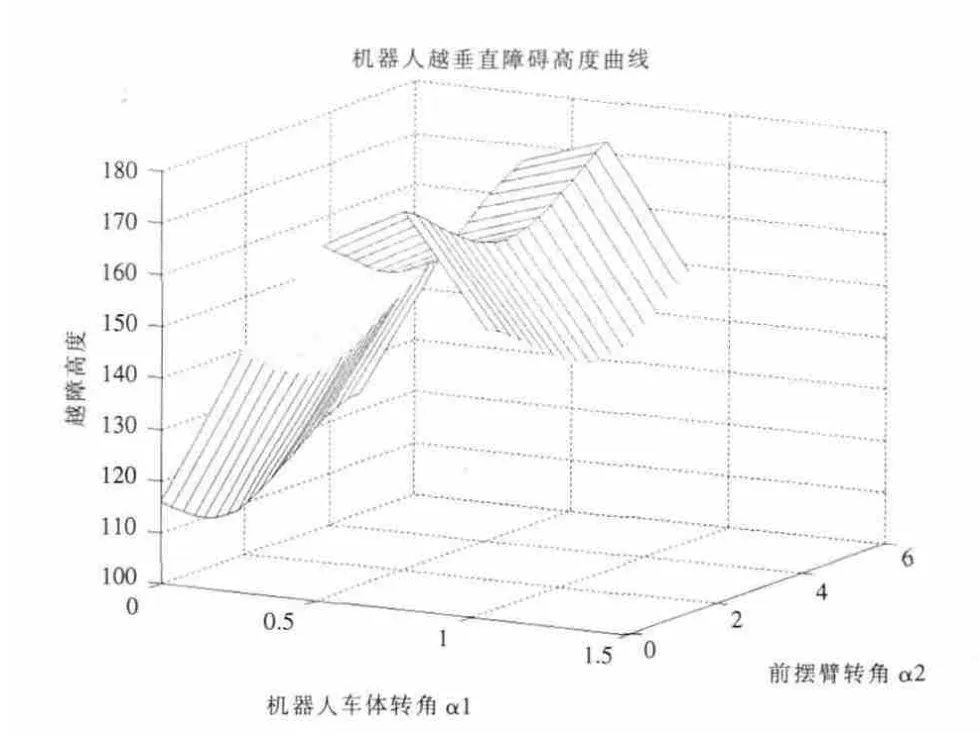
图3 机器人越垂直障碍高度曲线Fig.3 The robot across vertical obstacle high curve
3 ADAMS 运动学仿真分析
为了提高机器人设计的效率和可靠性,在机器人的研制设计中,采用虚拟仿真软件ADAMS 对六履带式移动机器人三维实体模型进行运动学仿真。得到机器人在越垂直障碍时的速度曲线、加速度曲线和机器人的实时位置曲线。仿真时要对机器人三维实体模型进行简化,但是要保证机器人的材料属性没有变化从而保证机器人的仿真能实际反映出机器人在越障时的速度、加速度和位置的变化过程。图4 是机器人在越垂直障碍时仿真得到的曲线。
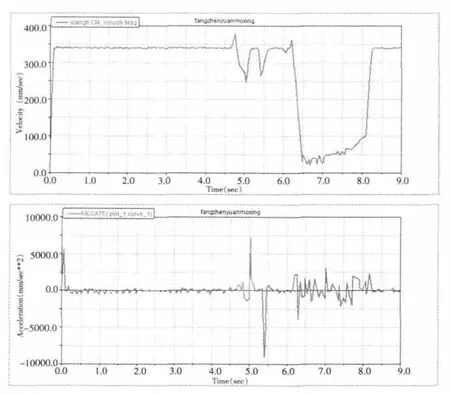
图4 机器人越垂直障碍速度与加速度曲线Fig.4 Across the vertical obstacle velocity and acceleration curve
4 结论
提出一种具有越障能力强、质量轻、体积小,能在狭小的工作空间中实施工作的六履带式移动机器人。该机器人能够越过台阶、楼梯等室内结构化和非结构化障碍;建立机器人运动学数学模型,分析机器人质心位置和越障高度;通过Adams 软件运动仿真,分析机器人的越垂直障碍性能,验证了六履带式移动机器人的可行性。
[1] 许旺,贾瑞清,江涛,等 薄煤层综采工作面安全监测移动机器人的研究[J]. 矿山机械,2010,20.
[2] 段星光,黄强,李科杰.小型轮履腿复合式机器人设计及运动特性分析[J]. 机械工程学.
[3] C. Pepper;S. Balakirsky;C. Scrapper. Robot simulation physics validation[C].2007 Performance Metrics for Intelligent Systems Workshop,2007.
[4] B. A. Jones;W. McMahan;I. D. Walker. Practical kinematics for real-time implementation of continuum robots[C].Proceedings of the 2006 International Conference on Robotics and Automation,2006.
[5] P. K. Pal;K. Jayarajan;D. D. Ray;M. Singh;V. Mahadev, et al. A mobile robotthat removed and disposed ammunition boxes[J].Current Science, 2007,12.
[6] C. L. Cawley. The Enhancement of a Multi-Terrain Mechatron for Autonomous Outdoor Applications[D].2006.
[7] W. McMahan;V. Chitrakaran;M. Csencsits;D. Dawson;I. D. Walker,et al. Field trials and testing of the OctArm continuum manipulator[C].Proceedings of the 2006 IEEE International Conference on Robotics and Automation, 2006.
[8] Yamanchi B. The Wayfarer modular navigation payload for intelligent robot infrastructure[M].Unmanned Ground Vehicle Teleology Vll,2005.
[9] F. Matsuno, S. Hirose, I. Akiyama, T. Inoh, M. Guarnieri, et al. Introduction of mission unit on information collection by on-rubble mobile platforms of development of rescue robot systems(DDT) project in Japan. SICE-ICASE International Joint Conference 2006, Bexco, Busan, Korea, 2006.
[10] W. D. Wang, Z. J. Du, L. N. Sun. Obstacle performance analysis of mine research robot based on terramechanics. Proceedings of the 2007 IEEE International Conference on Mechatronics and Automation, Harbin China,2007.
