末端弹道雷达信号的滤波及弹道外推研究
2014-12-26王庭辉任辉启徐流恩
王庭辉,任辉启,徐流恩,易 治,高 超
(1.河南理工大学 土木工程学院,河南 焦作454000;2.总参工程兵科研三所,河南 洛阳471023)
目前,对未知目标长时间精确弹道外推的计算方法并不多见[1-8],对非机动目标的精确外推方法研究有着重要的现实意义,它是近程防御系统的一项关键技术。在实时弹道滤波及外推计算中,鉴于计算速度和外推精度的需求,多数火控系统仍采用多项式(直线或抛物线)弹道模型和线性卡尔曼滤波算法实现滤波和外推,该方法在目标速度不高,外推时间不大于1s的情况下,结合校射算法能够提供较高的外推精度,对于高速目标外推1.5s以上且无法应用校射时,该方法的误差就会很大。
本文针对未知目标弹道末端飞行阶段无机动飞行特点,采用质点弹道模型描述目标的运动规律,鉴于雷达量测数据和目标运动模型的非线性特征,首先采用滤波精度高和稳定性好的UKF滤波算法对目标弹道和参数进行滤波估计,根据需要在某一时刻外推计算,实时滤波并外推2s,结果表明,对于飞行马赫数小于3的来袭目标,外推2s位置绝对误差在10m左右。此外,提出了一种基于最小二乘抛物线拟合和充分利用径向速度数据的计算方法来确定目标外推初始条件,计算过程和结果表明,该方法具有更快的计算速度和更好的精度。
1 目标运动模型
利用UKF滤波器实时滤波时,要选取合适的弹道模型,该模型中的状态变量要直接或间接与测量参数有关联,考虑到通常测量参数有限,以及滤波的快速性、实时性,通常选择能反应基本弹道特性的质点弹道模型[9-11]来描述弹箭的飞行运动。
2 UKF滤波并弹道外推
气目标的跟踪。它以UT变换为基础,通过设计少量Sigma点,并计算这些Sigma点经由非线性函数的传播,获得滤波器的状态和测量更新[13]。
地面雷达弹道探测系统采集目标的斜距、方位角、高低角和径向速度,即量测矢量为Y=()T。测量噪声满足均值为0的正态分布,误差项r,α,β,的均方差分别为±3m,±0.2°,±0.2°,±1m/s。
把经滤波后目标飞行状态估计终点值作为外推初值,用积分解算算法向前推算2s作为外推弹道。在仿真中,采用六自由度刚体弹道模型生成理想真实弹道,叠加雷达测量随机误差后作为雷达测量值,之后对该雷达测量值进行滤波并外推计算,由外推弹道与前面生成的理想真实弹道比较来验证算法的精确度。
同一弹体模型在2种不同速度和2种初始弹道倾角条件下的4组模拟弹道的外推绝对误差结果如表1所示,表中v0为初始速度,te为外推时间,δ为绝对误差。从表1中可以看出,外推2s的空间绝对误差都在10m左右。
UKF最初由Julier等[12]提出,用于解决再入大
表1 4组弹道外推误差比较
3 一种新拟合策略
采用质点弹道模型外推计算的精度依赖于初始边界条件和弹道系数的精确程度。这里提出了一种基于最小二乘拟合和充分利用径向速度数据的新的目标运动参数估计策略,来确定某一时刻目标的位置、速度和3个方向的弹道系数,给下一步外推提供更加准确的初始边界条件。
3.1 假定
采用该方法计算时系统需满足如下基本条件:
①雷达量测数据Y=(rαβ)T需进行粗差拣择并无长时间空白数据;
②末端弹道比较平稳,随机风影响不大,即在弹道末端(最后4s以内),可以近似认为目标在一个弹道面内运动。
3.2 确定目标空间位置
图1为目标在雷达地面直角坐标系中的位置图。
图1 目标在雷达地面直角坐标系中的位置
如图1所示,将距离r投影到xyz坐标轴上时,分别得到x(t)、y(t)和z(t)曲线,某一时刻tk,对前面1s内数据点采用最小二乘二次多项式拟合,得到曲线方程,由此确定tk时刻目标空间坐标位置:x(tk)、y(tk)和z(tk)。
3.3 确定目标速度
速度的确定比较关键,也是充分挖掘测量先验信息的关键。速度大小和方向精确度对外推精度影响很大,初始位置误差在整个外推过程中引起的位置偏差基本是一个稳定常值,而初始速度和方向误差所引起的外推误差则随外推时间增加而变大。充分挖掘测量先验信息就是要充分利用雷达测量数据(rαβ)T,尤其是径向速度的信息,获得tk时刻的目标速度vx(tk)、vy(tk)和vz(tk)。
如果不考虑随机风、弹体不对称因素,那么目标的运动可以忽略横偏,航迹在水平面xoz上的投影将会是一条直线。该直线方程由拟合数据点(x(t),z(t))得到,即z=f(x),直线与x轴之间的夹角就是弹道面的方向角αs,如图2所示。
图2 目标弹道空间投影关系
目标在弹道面内的速度方向角度暂定义为与水平面的夹角βs,该角度投影到xoy平面和zoy平面的角度分别为βs1和βs2,其投影关系为

式中:βs1可通过拟合x(t)和y(t)得到曲线y(x),由y(x)的斜率确定;βs2可通过拟合z(t)和y(t)得到曲线y(z),由y(z)的斜率确定。这样由上式得到两组βs,对其取算术平均值作为真实的βs。
由弹道面方向角αs和tk时刻速度方向角βs,就可以确定tk时刻目标绝对速度v(tk)在三个坐标轴方向上的分量:
对径向速度测量数据进行最小二乘拟合得到tk时刻速度值(tk),径向速度可以表达为

有了tk时刻的目标空间坐标x(tk)、y(tk)和z(tk),再由雷达量测径向距离r得到tk时刻的径向距离r(tk),结合式(2)、式(3)得到目标速度v(tk)的表达式:

式中:
得到了v(tk),由式(2)就可得到tk时刻目标3个较为精确的速度分量了。
3.4 确定目标弹道系数
此时已经有了tk时刻目标的空间位置和速度信息,尚需确定目标的弹道系数c。由质点弹道方程可知,弹道系数可由加速度确定,而加速度则可由离散的速度分量确定,即由得到的较为精确的速度分量得到加速度分量,进一步得到3个方向的弹道系数:
3.5 计算结果
通过上述计算方法对前文计算弹道进行拟合和外推计算,结果如图3、图4所示。表2给出了前文4种弹道的外推精度结果,和表1对比可知,高精确初始边界条件情况下,采用质点弹道模型外推结果精确度更高。
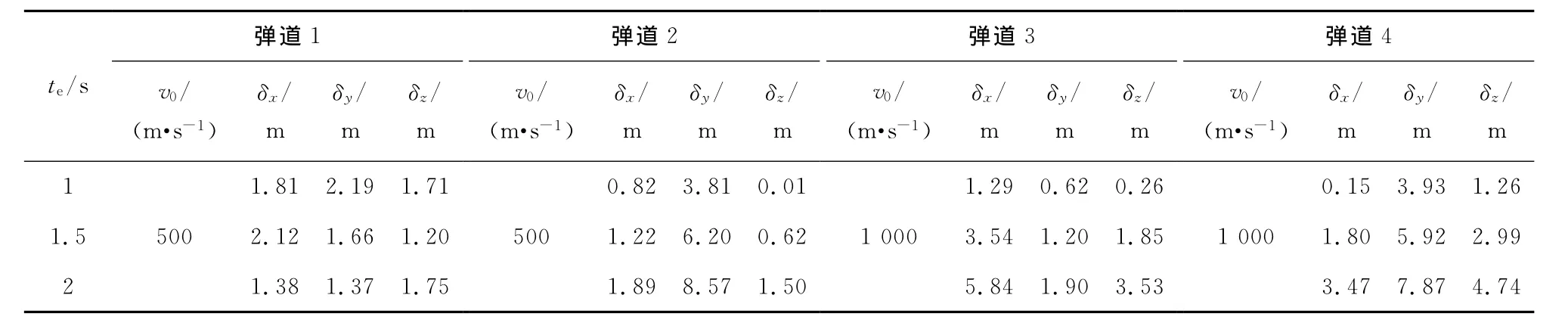
表2 4组弹道新方法外推误差
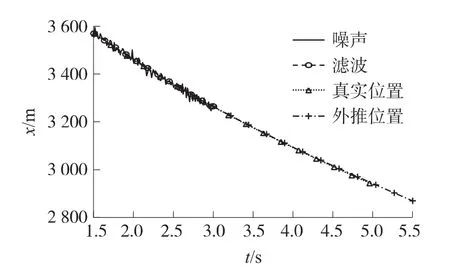
图3 x方向噪声、滤波、外推和真值比较
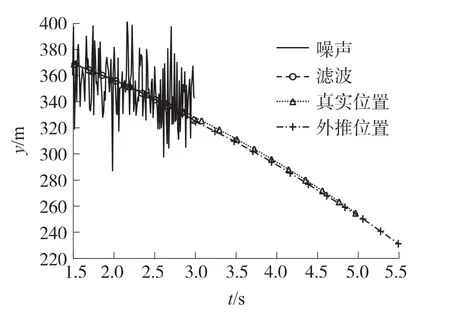
图4 y方向噪声、滤波、外推和真值比较
4 结束语
UKF滤波算法计算效率能够满足实时滤波需要,质点弹道模型能够作为滤波中的目标运动方程和相对精确的外推弹道模型使用。
新的拟合计算方法能够获得更为精确的外推初始参数,且计算量不大,便于实时处理。
[1]张先萌,王建新.卡尔曼滤波在炮位侦查雷达中的应用[J].华东工学院学报,1987(3):64-72.ZHANG Xian-meng,WANG Jian-xin.The applications of Kalman filter in fire-finder radar[J].Journal of East China Institute of Technology,1987(3):64-72.(in Chinese)
[2]周德全.中远程地炮侦校雷达弹道外推技术研究[D].南京:南京理工大学,1994.ZHOU De-quan.Study on the application of medium-long range artillery location radar in trajectory extrapolation[D].Nanjing:Nanjing University of Science and Technology,1994.(in Chinese)
[3]王建新,钱冬宁,周俊羽.数字滤波技术在弹道外推中的应用[J].火控雷达技术,1996,2(5):47-51.WANG Jian-xin,QIAN Dong-ning,ZHOU Jun-yu.Applications of digital filter technology in the trajectory extrapolation[J].Fire Control Radar Technology,1996,2(5):47-51.(in Chinese)
[4]史金光,徐明友,王中原,等.卡尔曼滤波在弹道修正弹落点推算中的应用[J].弹道学报,2008,20(3):41-48.SHI Jin-guang,XU Ming-you,WANG Zhong-yuan,et al.Application of Kalman filtering in calculation of trajectory falling point of trajectory correction projectiles[J].Journal of Ballistics,2008,20(3):41-48.(in Chinese)
[5]贺明科,朱炬波,周海银,等.弹道导弹落点的外推方法[J].战术导弹技术,2002(5):1-5.HE Ming-ke,ZHU Ju-bo,ZHOU Hai-yin,et al.An extrapolation method for ballistic missile impact point[J].Tactical Missile Technology,2002(5):1-5.(in Chinese)
[6]陶卿,刘欣,唐升平,等.基于支持向量机的弹道识别机器在雷 达 弹 道 外 推 中 的 应 用 [J].兵 工 学 报,2005,26(3):308-311.TAO Qing,LIU Xin,TANG Sheng-ping,et al.Support vector machine-based trajectory recognition with applications in the adjustment of radar trajectory prediction[J].Acta Armamentarii,2005,26(3):308-311.(in Chinese)
[7]高策,张淑梅,赵立荣,等.基于数值积分法的弹道导弹落点实时预测[J].计算机测量与控制,2012,20(2):404-406.GAO Ce,ZHANG Shu-mei,ZHAO Li-rong,et al.A real-time forecast method for impact point of ballistic missile based on numerical methods of integration[J].Computer Measurement& Control,2012,20(2):404-406.(in Chinese)
[8]刘彦君,乔士东,黄金才,等.一种高精度弹道导弹落点预测方法[J].弹道学报,2012,24(1):22-26.LIU Yan-jun,QIAO Shi-dong,HUANG Jin-cai,et al.A method of impact point prediction of ballistic missile[J].Journal of Ballistics,2012,24(1):22-26.(in Chinese)
[9]PAMADI K B,OHLMEYER E J,PEPITONE T R.Assessment of a GPS guided spinning projectile using an accelerometer only IMU,AIAA2004-4881[R].2004.
[10]杨荣军,王良明,修观,等.利用雷达测量数据的实际弹道重建[J].弹道学报,2011,23(3):43-46.YANG Rong-jun,WANG Liang-ming,XIU Guan,et al.Tracjectory reconstruction using radar measured data[J].Journal of Ballistics,2011,23(3):43-46.(in Chinese)
[11]徐明友.现代外弹道学[M].北京:兵器工业出版社,1999.XU Ming-you.Modern exterior ballistics[M].Beijing:Ordnance Industry Press,1999.(in Chinese)
[12]JULIER S J,UHLMANN J K.A new extension of the Kalman filter to nonlinear systems[C]//The Proceedings of AeroSense:11th International Symposium Aerospace/Defense Sensing,Simulation and Controls.Orlando:Int Symp Aerospace Defense Sensing,Simulation and Controls,1997:182-193.
[13]JULIER S J,UHLMANN J K.Reduced sigma point filters for the propagation of means and covariances through nonlinear transformations[C]//Proceedings of the American Control Conference.Jefferson City:IEEE,2002:887-892.