机载侦察设备目标定位数据处理方法
2014-11-08柴国庆张启鹏
柴国庆,赵 威,张 乐,张启鹏
(解放军63891部队,河南 洛阳471003)
引言
信息化是未来高技术战争的重要特征,各种机载侦察设备的独特优势决定了其在未来信息化战争中的重要地位。机载导航电子信息系统精确提供机载平台侦察飞行时的速度、姿态和位置等信息;全球定位系统(GPS)和北斗定位系统的综合应用,可使机载侦察设备能够对被侦察目标进行精确定位。机载侦察设备在复杂的敌我对抗环境中,用于实施对战场态势侦察、预定目标定位等情报侦察任务,在现代信息化局部战争中的作用显著提高。本文分析了机载侦察设备对预定区域内目标的侦察定位方法,提出采用圆概率误差进行目标定位数据处理时,应分析数据中存在的误差情况,并推导了在适用条件下的圆概率误差简化计算公式。
1 机载侦察设备目标定位方法
机载侦察设备在预定区域上空对被侦察目标进行侦察图像拍摄,侦察设备将所有侦察数据,包括机载平台的横滚俯仰姿态、航向角、高程值和目标的坐标位置等信息传送给机载情报处理系统并进行目标定位解算,完成对被侦察目标的精确定位[1-5]。机载侦察设备对预定目标进行定位时,为了方便目标位置的布设和目标真值的标定,一般采用在预定航线区域内设置多个人工目标。在对被侦察目标定位过程中,由于机载侦察设备受各分系统工作状态因素的影响,使得对被侦察目标的定位结果数据中存在系统误差和随机误差,所以,设置的多个人工目标应随机分布于预定航线区域内不同位置,使目标能够无规则地出现于机载侦察设备的侦察图像中,通过对随机目标的定位误差数据处理,评估机载侦察设备的目标定位能力。
目标定位精度一般采用圆概率误差(CEP)进行数据处理,计算圆概率误差时需要较多的数据样本,统计结果才能满足一定的置信度,通过查阅资料和计算,在样本量不小于30个时,圆概率误差的统计结果置信度可以达到90%。目前,对于圆概率误差(CEP),一是从概率理论方面定义,落入以散布中心为圆心的某个圆内的概率为0.5时,此圆的半径R值称为CEP;二是从数理统计方面定义,有0.5弹着点落入以平均弹着点为圆心的某个圆内,此圆的半径R值称为CEP;两者内涵均表示弹着点或定位精度的随机误差。在GJB6289-2008地地弹道式导弹命中精度评定方法[6]中的CEP定义为:以目标点为圆心,弹着概率为50%的圆域半径,记为CEP,该定义包含了弹着点或定位精度的随机误差和系统误差。
2 目标定位数据的圆概率误差处理方法
2.1 圆概率误差的一般形式
通过查阅目标定位数据处理方法,GJB4108-2000军用小型无人机系统部队试验规程[7]、GJB5418-2005地面定位导航系统定型试验规程[8]和GJB59.75-2007装甲车辆试验规程第75部分:导航定位设备性能试验[9]等国军标中均采用的目标定位数据处理方法:
式中:xi,yi为对目标第i次定位的坐标值;x0,y0为目标的坐标真值;σx,σy为对目标定位的均方根误差。
若采用公式(1)、(2)对存在了系统误差的某目标定位数据进行分析处理计算时,发现统计的目标定位数据落入CEP半径圆内的概率较小,达不到50%的要求,即该方法处理的数据结果偏离了圆概率误差定义。通过推导该3个国军标中公式(1)、(2)的应用条件,是仅适用于目标定位数据样本中无系统误差且随机误差接近圆散布时的情况。
若目标定位数据存在明显的随机误差和系统误差[10],需从圆概率的误差定义出发,按照以被定位目标为原点建立直角坐标系XOY,假设目标的定位结果(x,y)满足二维正态分布,其服从的联合概率密度为
式中:σx,σy为横向、纵向定位偏差的标准差;μx,μy为横向、纵向定位偏差的均值;ρ为横向、纵向定位偏差的相关系数。
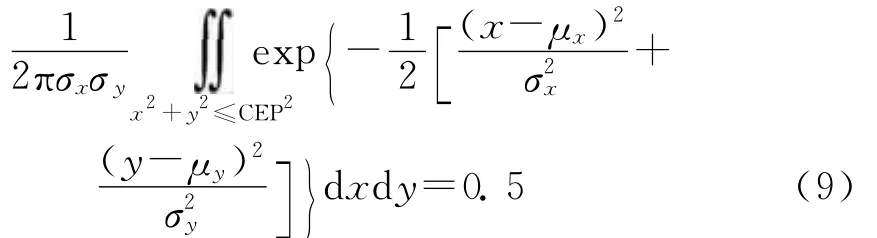
定位结果落入半径为R的圆的概率:
按照圆概率误差的定义,当P=50%时,(4)式即为圆概率误差(CEP)方程式的一般形式。
2.2 几种圆概率误差的简化公式
不同条件下圆概率误差计算方法的简化公式是不同的,通过对圆概率误差方程式的一般形式进行分析,可以推导出几种不同适用范围条件下圆概率误差的简化计算公式。
① 当定位数据中无系统误差,x,y相互独立,即系统误差μx=μy=0,ρ=0,随机误差为圆散布情形σx=σy=σ时,则圆概率误差的计算公式可表示为


由以上推导过程可以看出,该简易的定位数据计算公式只是在当数据中无系统误差和x、y相互独立且同分布情况下才能使用的公式。
② 当定位数据中无系统误差,x和y相互独立,即系统误差μx=μy=0,ρ=0,存在随机误差,若σx≠σy,令σmax=max{σx,σy},σmin=min{σx,σy},则圆概率误差的计算公式可分别表示为
③ 当x和y相互独立,即ρ=0时,(x,y)服从联合概率密度函数,其圆概率误差计算公式可表示为
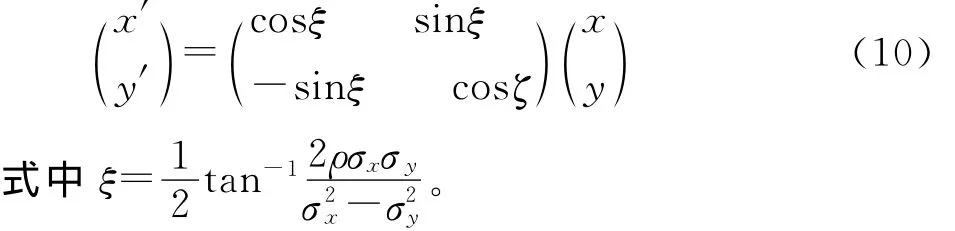
④ 当x和y不相互独立,即0<ρ<1时,可通过正交变换公式(10)将(x,y)转换到(x′,y′),使转换后的ρ′=0,则(x′,y′)服从联合概率密度函数,其圆概率误差计算公式形式与公式(9)相同,正交变换公式表示为
⑤ 当定位数据中存在系统误差,且随机误差为圆散布情形σx=σy=σ,圆概率误差可由不同的多项式拟合公式计算得到,多项式拟合公式系数如表1表示。

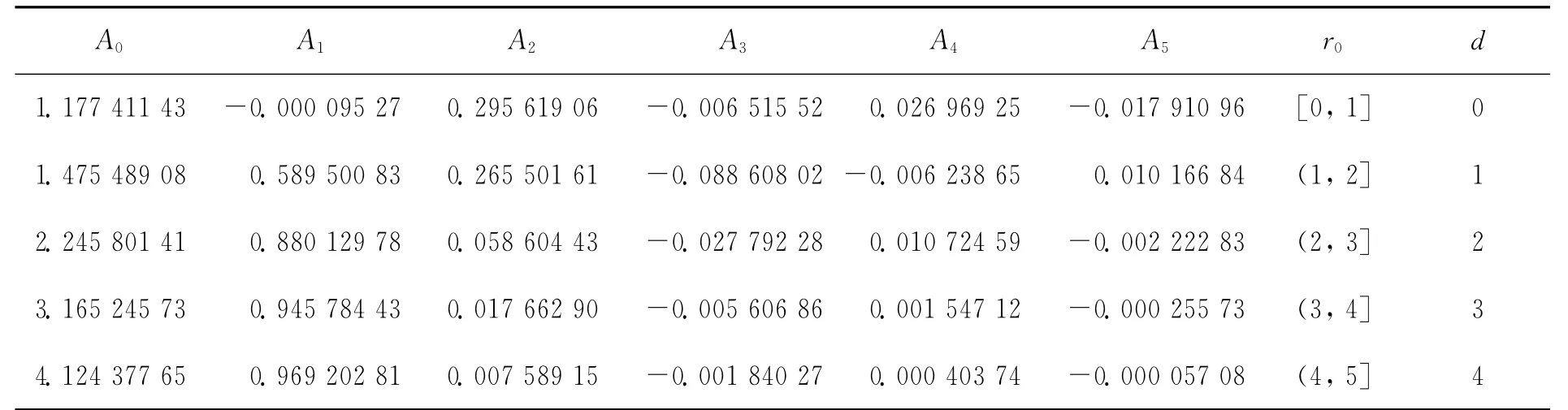
表1 多项式拟合公式系数Table 1 Coefficients of polynomial fitting formula
⑥当定位数据中同时存在系统误差和随机误差,即μx≠μy≠0,ρ≠0,σx≠σy,应采用一般形式的圆概率误差公式(4)的极坐标形式进行计算:

对公式(12)的计算可采用MATLAB软件程序进行数值积分的方法可获得圆概率误差(CEP)。
3 圆概率误差处理方法应用
分别采用(1)式和(12)式,对存在系统误差和随机误差的一组目标定位数据进行处理,计算CEP值,其中x,y方向的系统误差分别为-18.26m和10.56m,随机误差分别为2.67 m和2.46m,目标定位数据处理对比结果如图1所示。
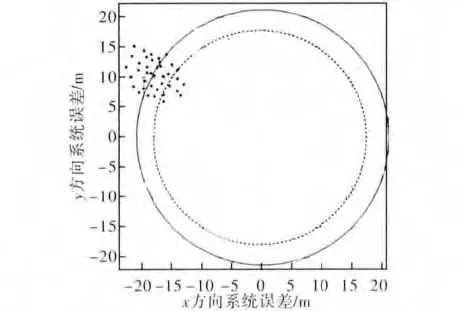
图1 目标定位数据处理对比结果Fig.1 Targeting data processing comparison results
经处理分析,直接采用(1)式,按照数据无系统误差进行计算的CEP值为17.25m,在40个数据样本中,有8个位于CEP半径圆内,概率远小于50%,如图1中虚线圆内外的数据样本量所示。采用(12)式进行积分计算的CEP值为21.21m,在40个数据样本中,有19个位于CEP半径内,概率为47.5%,如图1中实线圆内外的数据样本量所示。
4 结束语
机载侦察设备对目标定位过程受到的影响因素较多,所以目标定位数据中会存在系统误差和随机误差。本文提出在采用圆概率误差对目标定位数据进行处理时,应从目标定位数据样本量、预定飞行航线与被侦察目标相互位置关系、目标定位真值与测量值关系等因素,分析并判断目标定位数据处理的适用条件。根据圆概率误差的定义和圆概率误差方程式的一般形式,推导了6种适用条件下的圆概率误差简化计算公式。通过数据分析选用符合条件要求的圆概率误差简化计算公式,可提高对目标定位数据处理的精度,准确分析机载侦察设备对目标的定位结果。
[1] 闫明,杜佩,王惠林,等.机载光电系统的地面多目标定位算法[J].应用光学,2012,33(4):717-720.YAN Ming,DU Pei,WANG Hui-lin,et al.Ground multi-target positioning algorithm for airborne optoelectronic system[J].Journal of Applied Optics,2012,33(4):717-720.(in Chinese with an English abstract)
[2] 闫明,邹美英,王惠林,等.机载稳瞄系统目标定位与误差分析[J].应用光学,2008,29(增刊):53-56.YAN Ming,ZOU Mei-ying,WANG Hui-lin,et al.Target positioning and error analysis of airborne stabilized-aiming system[J].Journal of Applied Optics,2008,29(增 刊):53-56.(in Chinese with an English abstract)
[3] 王惠林,杜佩,庞澜,等.基于机载惯导系统的地理跟踪技术[J].应用光学,2011,32(Sup):5-8.WANG Hui-lin,DU Pei,PANG Lan,et al.Geotracking technique based on INS[J].Journal of Applied Optics,2011,32(Sup):5-8.(in Chinese with an English abstract)
[4] 董晶,傅丹,杨夏,等.无人机视频运动目标实时检测及跟踪[J].应用光学,2013,34(2):255-259.DONG Jing,FU Dan,YANG Xia,et al.Real-time moving object detection and tracking by using UAV vidoes[J].Journal of Applied Optics,2013,34(2):255-259.(in Chinese with an English abstract)
[5] 肖彦海.无人侦察机的姿态控制及其对地面目标定位技术的研究[M].沈阳:沈阳工业大学出版社,2008.XIAO Yan-hai.Research on flight control and target location technology for an unmanned reconnaissance aerial vehicle[M].Shenyang:Shenyang University of Teehnology Press,2008.(in Chinese)
[6] 安维廉,宋天莉,徐德坤,等.GJB6289-2008地地弹道式导弹命中精度评定方法[R].北京:总装备部军标出版发行部,2008.AN Wei-lian,SONG Tian-li,XU De-kun,et al.GJB6289-2008assessment methods for ground to ground ballistic missile hit accuracy[R].Beijing:The General Armaments Deparment Published the Distribution Department,2008.(in Chinese)
[7] 高洪兴,黄洁生,朱剑佑,等.GJB4108-2000军用小型无人机系统部队试验规程[R].北京:总装备部军标出版发行部,2000.GAO Hong-xing,HUANG Jie-sheng,ZHU Jian-you,et al.GJB4108-2000procedure for troop test of military mini-UAV systems[R].Beijing:The General Armaments Deparment Published the Distribution Department,2000.(in Chinese)
[8] 常岗,余学锋,王小兵,等.GJB5418-2005地面定位导航系统定型试验规程[R].北京:总装备部军标出版发行部,2005.CHANG Gang,Yu Xue-feng,WANG Xiao-bing,et al.GJB5418-2005Approval test procedure for land vehicle navigation and position system[R].Beifjing:The General Armaments Deparment Published the Distribution Departme Department,2005.(in Chinese)
[9] 张志强,胡社平,张又明,等.GJB59.75-2007装甲车辆试验规程 第75部分:导航定位设备性能试验[R].北京:总装备部军标出版发行部,2007.ZHANG Zhi-qiang,HU She-ping,ZHANG Youming,et al.GJB59.75-2007test operations procedure for armoured vehicles-part 75:Navigation positioning equipment performance test[R].Beijing:The Gener-al Armaments Deparment Published the Distribution Departme Department,2007.(in Chinese)
[10] 史辉,郝晰辉,杨玉淳,等.光电侦察系统目标定位精度评价指标研究[J].应用光学,2012,33(3):446-451.SHI Hui,HAO Xi-hui,YANG Yu-chun,et al.Target location accuracy evaluation index of electro-optical reconnaissance system[J].Journal of Applied Optics,2012,33(3):446-451.(in Chinese with an English abstract)
