足球机器人比赛场地图像特征识别
2014-10-29浦宇欢毛丽民万莹俞雷王晨希
浦宇欢 毛丽民 万莹 俞雷 王晨希
(常熟理工学院,江苏常熟,215500)
0 引 言
特征提取是用计算机提取图像信息。目前,分割算法一般都是针对灰度图像,常用的图像特征有颜色特征、纹理特征、形状特征、空间关系特征[1-3]。然而由于彩色图像提供了更加丰富的信息,彩色图像处理受到越来越多的关注[4-5]。彩色图像分割面临2个主要问题[6]:选取合适的色彩空间;选择恰当的分割方法。
机器人足球比赛的视觉系统信息的采集和处理,关系到机器人任务执行质量,受到广泛关注[6-8]。文献[9]研究了中型组机器人场地标定系统的实现方法,文献[10]给出了全场定位系统的一般方法,文献[11]考虑了中型组足球机器人场上图像的抗干扰系统的实现。
手动标定一方面受参赛选手的主观影响,另一方面,在场地环境信息发生变化时,视觉系统信息识别能力降低,直接影响足球机器人的决策和运行。本文针对上述彩色图像分割存在的问题,为了准确提取场地图像彩色信息,结合HSV色彩空间3个分量的无关性,提出了一种基于HSV空间彩色图像分割算法,将图像的颜色值从RGB空间转换到HSV空间,经过H分割对彩色信息进行提取得到分割结果。
1 特征提取
1.1 颜色空间转换
颜色是外界光刺激作用于人的视觉器官而产生的主观感觉,颜色特性既可以从物理量进行描述,也可以从观察者的主观感觉来描述。颜色视觉有三种特性,描述颜色的物理量是亮度、主波长和纯度,相应的心理感觉是明度,色调和饱和度。
1)RGB
按照光学理论,红、绿、蓝可以混合在一起得到绝大部分色彩,红、绿,蓝被称为三原色,三原色是相互独立的,根据三原色基理,于RGB彩色空间中,任意色光F都可以用R,G,B三色不同分量的相加混合而成:

2)HSV
HSV颜色空间采用色调(H)、饱和度(S)、亮度(V)来表示像素颜色,即HSV颜色空间.这样,目标的色调和亮度相互独立,系统的稳定性得到提高。

表1 :颜色空间对比
1.2 色彩空间的选取
RGB格式是从物理学角度出发描述颜色,HSV则是从人眼的主观感觉出发描述颜色。人眼不能直接感觉红、绿、蓝三色的比例,只能通过感知颜色的亮度、色调和饱和度来区分物体。在RGB空间内,三个分量相关性很高,无法用一个单一参数对图像中的颜色进行区间划定,若将RGB图像转换为灰度图像再进行分割,则会大大损失图像的色彩特征。
为了使算法对于颜色距离的定义符合人的视觉特征,定义一个从RGB到HSV的非线性变换。HSV色彩空间是由色调(Hue)、饱和度(Saturation)和亮度(Value)三个分量组成,色调(H)表示不同的颜色,饱和度(S)表示颜色的深浅,亮度(V)表示颜色的明暗程度。
设(r,g,b)分别是一个颜色的红、绿和蓝坐标,它们的值是在0到1之间的实数。设max等价于r,g,b中的最大者,min为最小者。要找到在HSV空间中的(h,s,v)值,这里的h∈[ 0,360°)是角度的色相角,而s,v∈[0,1]是饱和度和亮度,计算为:

这样,h,s,v三个分量在一维矢量上分布开来,经过量化后,可有效减少图像受光照强度的影响。
2 阈值分割与区域合并算法
2.1 传统二值处理
一幅图像包括目标物体、背景还有噪声,要想从多值的数字图像中直接提取出目标物体,最常用的方法就是设定一个阈值T,用T将图像的数据分成两部分:大于T的像素群和小于T的像素群。设原始图像为f (x,y),T为阈值,分割图像时则满足下式(或把式中1和0颠倒):

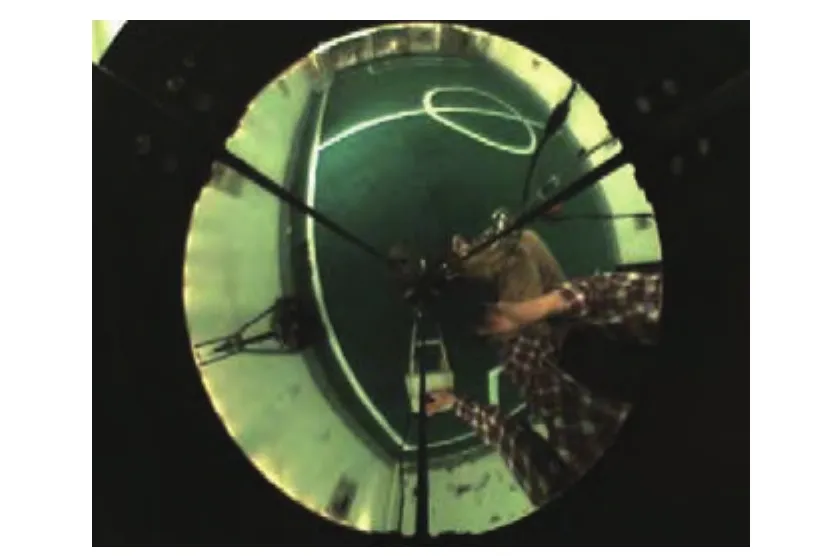
图1 二值处理前图像

图2 二值处理后的图像图
2.2 H阈值分割
如果将RGB图像转化到HSV空间,就可以直接给颜色划定一个定义区间,即H(色调)的区间。在HSV色彩空间内进行颜色图像的分割,通过设定颜色区间的H(色调)的门限值,提取图像中颜色的像素点,从而实现分割。
HSV空间模型的色谱,从左到右色调(H)变化(具体数值由程序调色板决定),从上到下亮度(V)变化,从小到大饱和度(S)变化(0~255),S越大,颜色越纯。可见HSV空间侧重于H、S的衡量,这使得HSV色彩系统有一个非常明显的优点:容易理解,色彩分类简单,通过改变HSV值获得的效果清晰且可预见,但也存在着一些不足,如空间色彩的距离与理解的距离毫不相干。
在0°~60°,红色分量值保持最大,蓝色分量为0,红色与绿色分量中和,色谱在红与黄间过渡;60°~120°,红色分量逐渐衰减,绿色分量达最大值,色谱在黄与绿间过渡,至120°,红色、蓝色分量都达最小值0,色谱呈现纯绿色;120°~180°,红色分量保持为0,绿色分量保持最大,蓝色分量逐渐增强,色谱在逐渐呈青色; 180°~240°,绿色分量衰减,色谱呈纯蓝色;240°~300°,红色分量开始由0增加,混合蓝色分量,色谱向紫色过渡,300°~360°,红色分量达极值,蓝色衰减;至360°,色谱重新回到纯红色。
由此可以看出,在HSV色彩空间中,色谱呈现纯黄色向纯绿色过渡以及纯绿色向纯青色过渡的这个区间是色谱可能呈现绿色的区间,即60°~180°之间。
通过选取计算图像某区域对象的特征值来进行区域对象的合并,其具体步骤如下:
1)计算某区域A对象的均值和方差
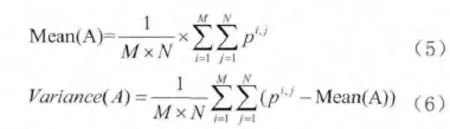
2)计算与该区域对象相邻的对象的均值与方差,根据对象之间的相似程度进行合并;
3)计算合并后对象的均值,作为该区域对象的彩色空间分量值;
4)检查是否结束,否则继续重复以上过程。
3 实验结果及分析
3.1 图像空间选取测试

图3 RGB采集的图片

图4 经过HSV转化过后采集的图片
颜色空间试验测试:图3和图4对比可以看出,在直接从摄像机采集到的RGB图像上,场地外的窗户有阳光,场地中央也留有一条阳光,可以观察到场地颜色有所失真,特别是场地白线和周围白墙都有些偏绿,对于稍微远一点物体颜色偏差很大。而经过转换后采集的图像不同,同样环境,图像各物体颜色与人的肉眼所观察到的基本一致,各物体颜色变化细微。
3.2 H阈值分割试验

图5 绿色场地1

图6 绿色场地2
由图5和图6看出,通过H阈值的选取实现了绿色场地信息的标定,但是单纯通过H阈值往往不能准确地使绿色场地完整被标定,适当增加饱和度上限,绿色信息的识别更加准确。

图7 球1

图8 球2
对比图7与图8,图8通过适当减小S的下限将球的标定范围增大,将图7中有差异的色块也标定进去,增加了球的识别度。可见,在H值确定的情况下,饱和度对图像分割的影响特别大。

图9 白色场线1

图10 白色场线2
白色场线的二值性淡化了色调(H)与饱和度(S)的作用,突出了亮度(V)对中型组足球机器人场地标定的重要性。如图9与图10,在H与S确定的情况下,变动V的上限可以有效地将白色场线的信息完整收录。这也揭示了HSV三个参数相互独立、各司其职的作用。
因此,以中型组机器人为平台,在实际应用中利用H阈值方法是可行的,白色场线划分出的界限对场外红色能起到很好的抗干扰作用,即使在对球的阈值进行标定时,将其他红色标进去也不受影响。
4 实验结果分析
颜色是足球机器人场地识别的重要特征,通过阈值编辑软件将摄像头采集的图像进行非均匀的量化,突出彩色图像的主体部分,通过把RGB模型转换到HSV模型,经H分割,实现了彩色图像场地信息的提取。
[1]林开殿,吴军辉,徐立鸿.彩色图像分割方法综述[J].中国图像图形学报,2005,10(1):1-10.
[2]黄飞,昊敏渊,曹开田.基于HIS空间的彩色图像分割[J].小型微型计算机系统,2004(3).
[3]扬其宇,王敏,黄振宇.基于彩色图像的移动机器人视觉导航系统[J].华中科技大学学报(自然科学版),2004(增刊).
[4]郝海涛,田玉敏.彩色图像分割方法及进展[J].山西师范大学学报,2005.
[5]蔡世捷.基于MATLAB的树木图像分割方法研究[D].南京林业大学,2005.
[6]田国会,尹建芹,宁春林,等. 足球机器人视觉子系统及其关键问题[J]. 山东工业大学学报,2002(1):88.
[7]袁奋杰,周晓,夏军. 基于FPGA的RGB和HSV色空间转换算法实现[J]. 电子器件,2010(4):494-496.
[8]徐春梅,王春耀,刘跃. 基于机器视觉系统的颜色识别[J]. 机械设计与制造,2011(8):257.
[9]王会,毛丽民,江维勇,等.中型组足球机器人场地标定系统的研究[J].常熟理工学院学报(自然科学版),2012,26(8):76-79.
[10]耿小飞,毛丽民,庄梦秋,等.中型组足球机器人全场定位系统的研究[J].常熟理工学院学报(自然科学版),2012,26(10):100-103.
[11]钱晟, 毛丽民,张亚飞,等.中型组足球机器人抗干扰系统的研究[J].常熟理工学院学报(自然科学版),2012,26(10):95-99.
