参数扰动广义混沌同步化线谱控制技术研究
2014-09-18杨庆超何其伟孙方旭
杨庆超,何其伟,孙方旭
(海军工程大学 科研部,武汉 430033)
随着隐身技术和反潜技术的发展,舰船辐射水声线谱已成为被动声纳进行目标参数估计和类型识别的主要依据[1]。由于舰船机械设备大部分为旋转类机械,工作工况相对稳定,则每艘舰船的辐射水声线谱相对较为稳定,因此,线谱称为舰船的“指纹”,对其隐身性能构成了严重危害。由于传统的线性被动隔振系统具有频率保持性,不能够有效消除和改变线谱特征。针对这一难题,朱石坚等[2-3]提出了线谱混沌化控制技术,即利用非线性系统处于混沌运动状态时,其功率谱呈连续谱且下降的特性对线谱特征进行控制,从而提高隐身性。
目前,线谱混沌化控制技术在原理验证、隔振性能评估、混沌快速识别、试验研究等方面均取得了成效[4-6]。为使非线性隔振系统由周期运动状态转变为混沌运动状态,张振海等[7-11]提出了跟踪混沌化控制技术、基于滑模控制的投影混沌同步控制技术、离散混沌化控制技术、反馈混沌化控制技术等和实时混沌化控制技术,但均需消耗较大的能量,使其难以应用到实际工程中。考虑到舰船隔振系统中应用了大量的气囊隔振器,气囊隔振器的气压对其刚度特性具有重要影响,且易于控制调节,消耗能量小,本文提出了基于参数扰动的广义混沌同步线谱控制技术。
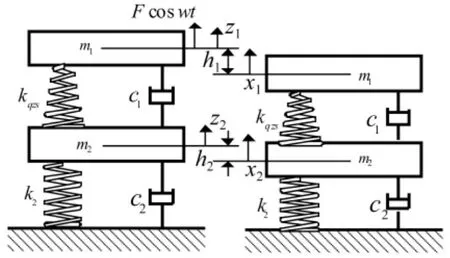
图1 考虑柔性基础的准零刚度隔振系统Fig.1 Vibration isolation system with flexible foundation
1 双层隔振系统数学模型及动力学特性
根据牛顿第二定律,系统动力学方程为:

式中,F cos wt为系统外激励力,k1为气囊隔振器的刚度,c1为气囊隔振器阻尼系数,k2为柔性基础的刚度,c2为柔性基础阻尼系数,Z1为弹簧处于自然状态时被隔振物体的位移,Z2为弹簧处于自然状态时中间质量块的位移,m1为被隔振物体的质量,m2为中间质量块的质量。

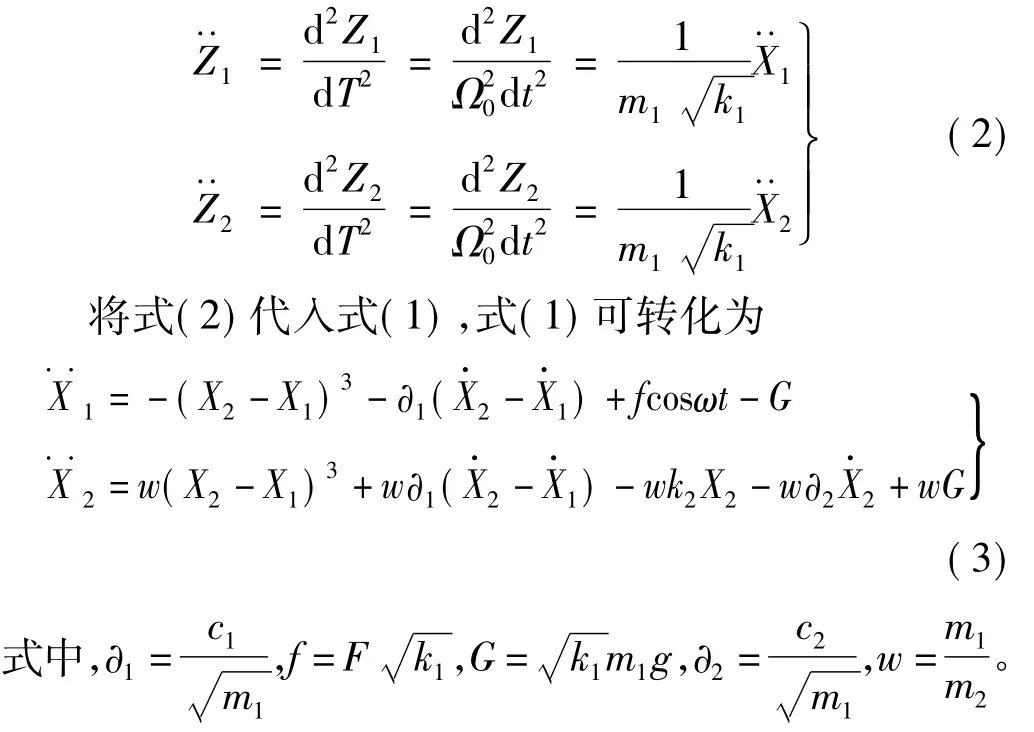
令参数1=0.1,2=0.1,w=0.2,G=2,f=25,ω=4,则双层隔振系统无外界参数扰动时,双层隔振系统的相图和功率谱图如图2和3所示。由图可知,系统处于单周期运动状态,且激励频率处(ω=4)的线谱特征非常明显,此时的线谱强度为0.203 4 dB。
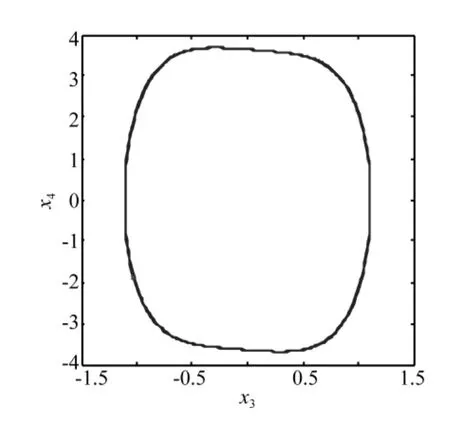
图2 系统底板相图Fig.2 The phase diagram of the system base
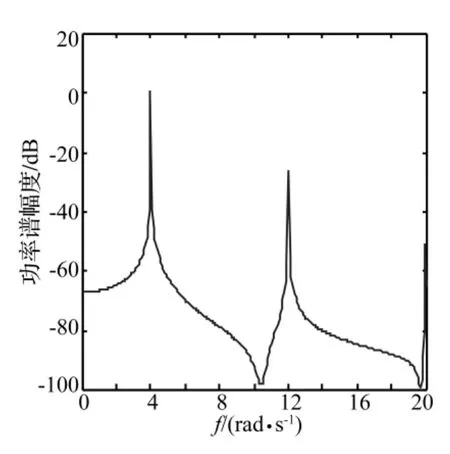
图3 系统底板功率谱图Fig.3 The power spectrum diagram of the system base

图4 Duffing系统相图Fig.4 The phase diagram of the Duffing system
2 数值仿真
以外界混沌系统的某一输出信号为驱动信号,对气囊隔振器的气压进行控制,即控制隔振系统的刚度,实现隔振系统的广义混沌同步化,从而达到削弱特征线谱强度和改变频谱结构的效果。
2.1 驱动系统为Duffing系统时线谱控制效果
Duffing系统的方程为

当 Duffing系统参数 a=0.08,b=9.2,G1=2,ω =4,初始条件为(0,0)时[6],系统的相图和功率谱图如图4和图5所示。由图4可知,此时Duffing系统的轨迹充满了整个相空间,图中的红色点表示周期轨道的个数,分布在相空间的多个红色点表示此时系统的周期轨道是互相缠绕在一起的。由图5可知,此时Duffing系统的功率谱呈现连续谱特性,综上所述,可判断此时Duffing驱动系统处于混沌运动状态。
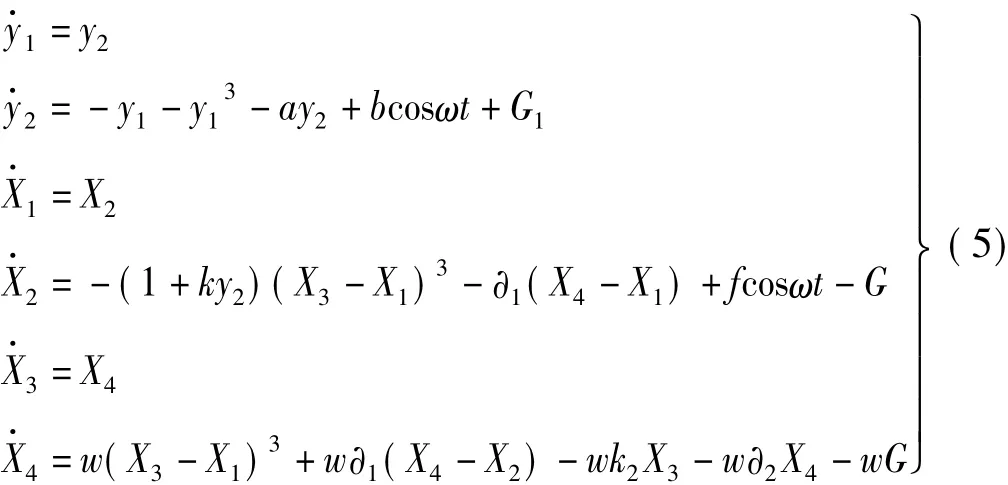
以Duffing系统为外界驱动系统,以Duffing系统的输出信号y2为驱动信号,对双层隔振系统的刚度进行扰动,扰动强度为k,则该耦合系统的方程如式(5)所列。为使结果具有可比性,耦合系统的参数取值与上述保持一致。耦合系统功率谱最强线谱随扰动强度的变化趋势如图6所示。由图6可知,当k在0附近取值时,系统最强线谱强度会降低,即在较小的扰动情况下系统将跟随Duffing驱动系统运动,并使线谱强度得到抑制。当k=0.068时,底板的相图和功率谱图如图7和图8所示,由图可知,系统运动轨迹充满了整个相图空间且功率谱呈现连续谱特性,即系统由单周期运动状态转变为了混沌运动状态。一方面,特征线谱强度(ω=4)得到了有效的抑制,此时的特征线谱强度为-61.756 9 dB,比无 Duffing系统驱动时降低了61.960 3 dB。另一方面,系统的频谱结构发生了较大的改变,提高了系统的伪装性能。当k=0.086时,底板的相图和功率谱图如图9和图10所示,由图可知,在该种情况下,同样可取得良好的效果。
2.2 驱动系统为Lorenz系统时线谱控制效果
Lorenz系统的方程为
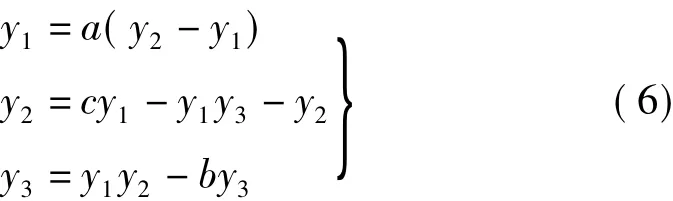
当 Lorenz系统参数 a=10,b=8/3
,c=28,初始条件为(1,1)时,系统的相图和功率谱图如图11和图12所示。由图11可知,此时Lorenz系统的运动轨迹缠绕在一起并充满了整个相空间。由图12可知,此时Lorenz系统的功率谱呈现比较平坦的连续谱特性,综上所述,可判断此时Lorenz驱动系统处于混沌运动状态。
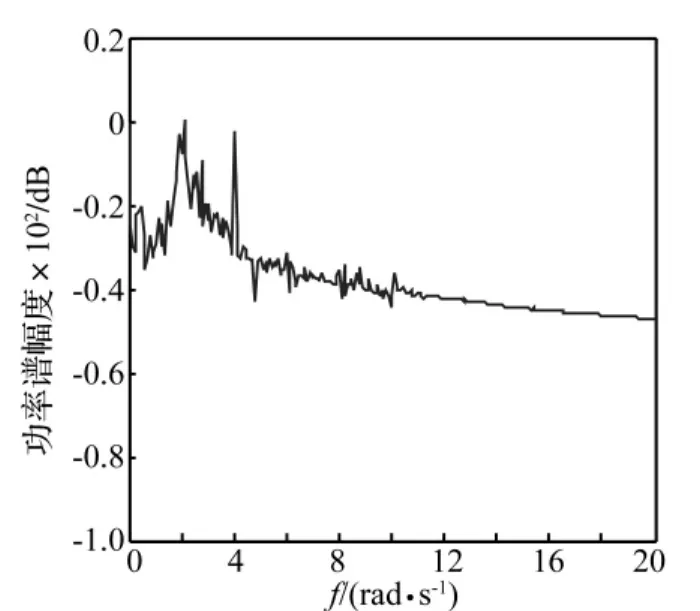
图5 Duffing 系统功率谱图Fig. 5 The power spectrum diagram of theDuffing system
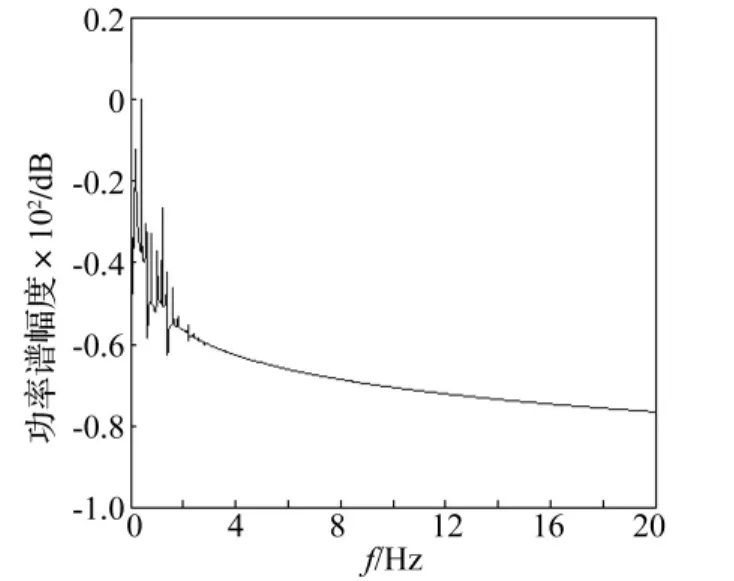
图8 当k=0.068时耦合系统功率谱图Fig.8 The power spectrum diagram of coupled system of k=0.068
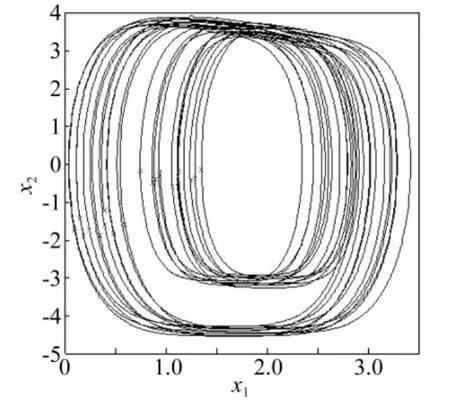
图9 当k=0.086时耦合系统相图Fig.9 The phase diagram of coupled system of k=0.086
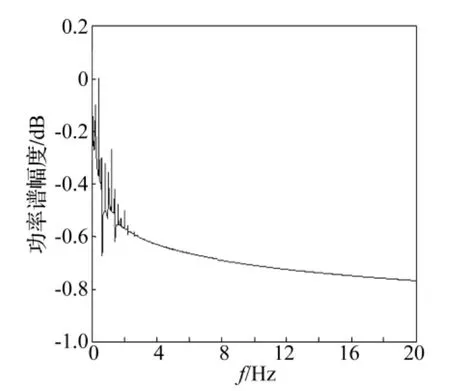
图10 当k=0.086时耦合系统功率谱图Fig.10 The power spectrum diagram of coupled system of k=0.086
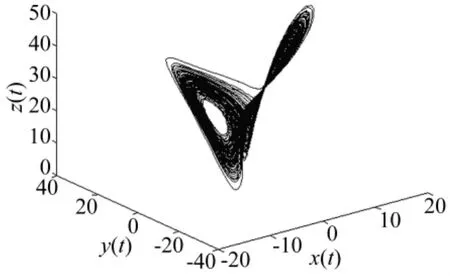
图11 Lorenz系统的相图Fig.11 The phase diagram of theLorenz system
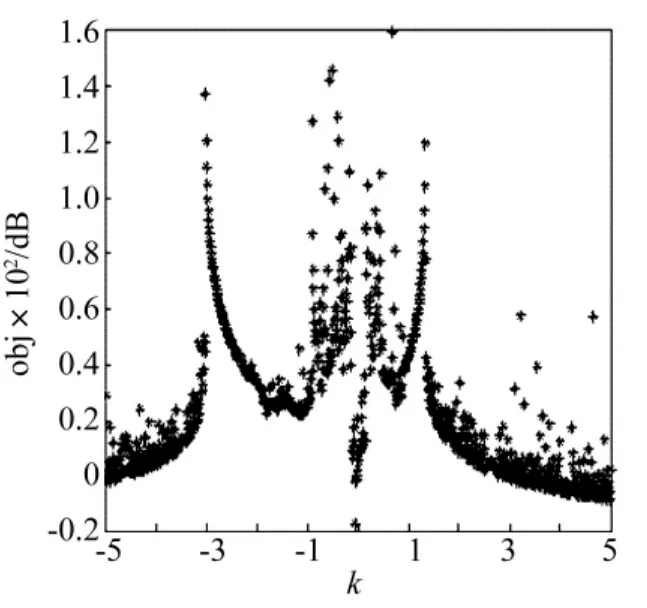
图6 耦合系统最强线谱与k的变化趋势Fig.6 The largest line spectrum of coupled system for various values of k
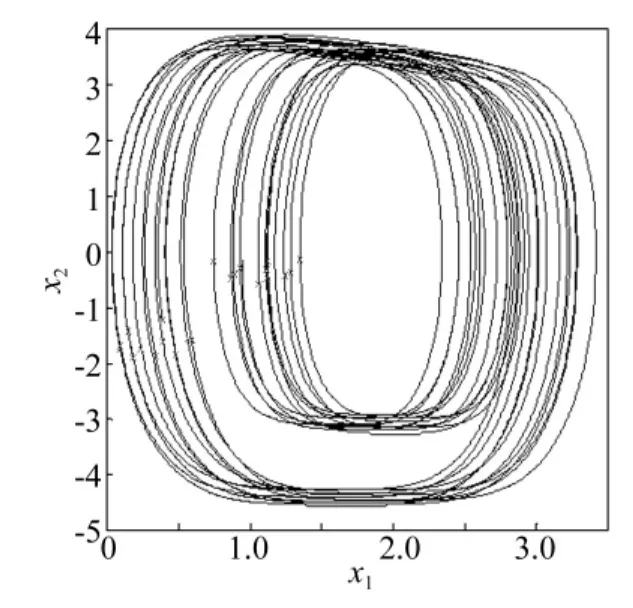
图7 当k=0.068时耦合系统相图Fig.7 The phase diagram of coupled system of k=0.068
以Lorenz系统的输出信号y1作为驱动信号,对双层准零刚度系统的刚度进行扰动,此时耦合系统的方程如式(7)所列。系统参数取值与上面保持一致,耦合系统的最强线谱随扰动强度k的变化趋势如图13所示。由图13可知,当扰动强度k的取值在0附近时,系统最强线谱的幅度最小,即利用较小的外界能量能够使系统的线谱强度得到有效的抑制。当k=0.001时的相图和底板位移功率谱图如图14和图15所示,由图可知,系统已转化为混沌运动状态,与无外界驱动时的功率谱图3相比,系统的特征线谱强度的得到了有效抑制,由原来的0.203 4 dB 降到了 -15.620 3 dB,且功率谱的整体强度均有所下降。当k=0.003时的相图和底板位移功率谱图如图16和图17所示,通过比较图17和图3可得,此时亦能得到良好的线谱控制效果,特征线谱强度降低了15.866 1 dB。
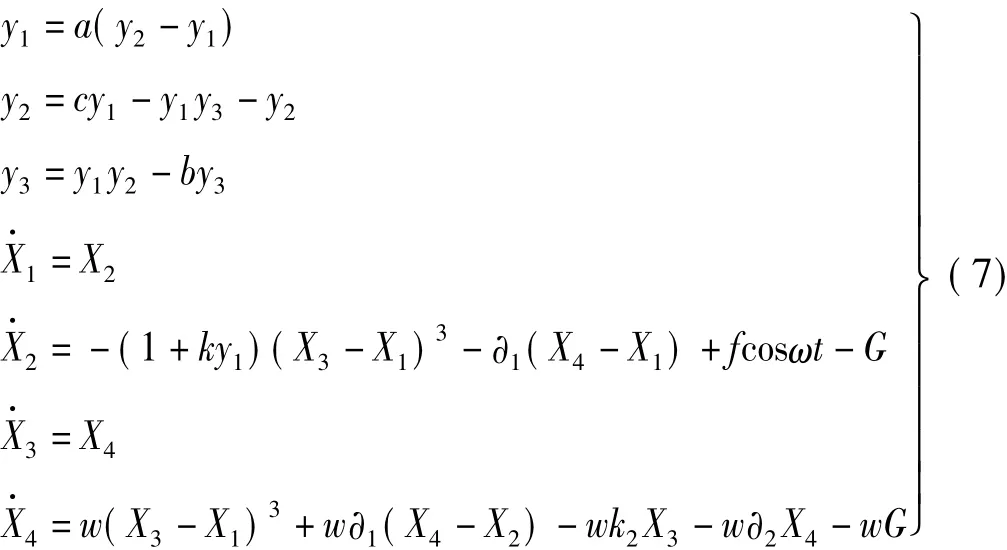
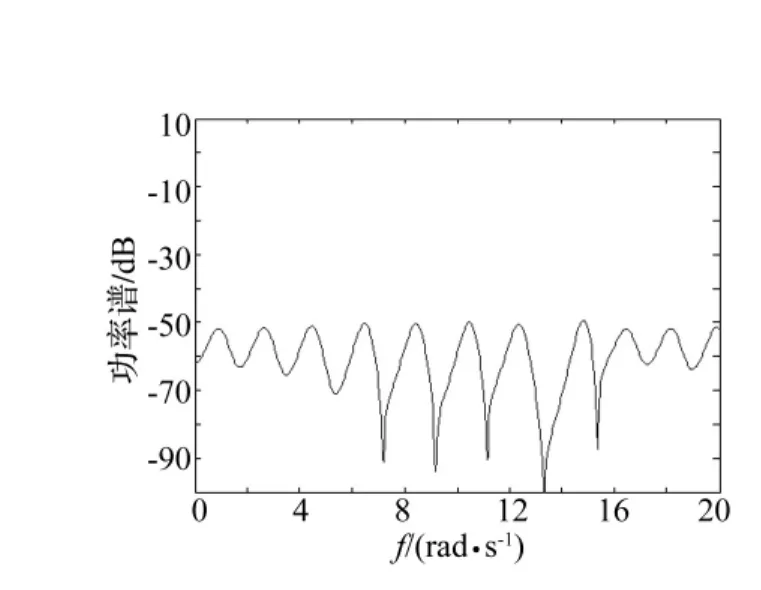
图12 Lorenz系统功率谱图Fig.12 The power spectrum diagram of the Lorenz system

图13 耦合系统最强线谱与k的变化趋势Fig.13 The largest line spectrum of coupled system for various values of k
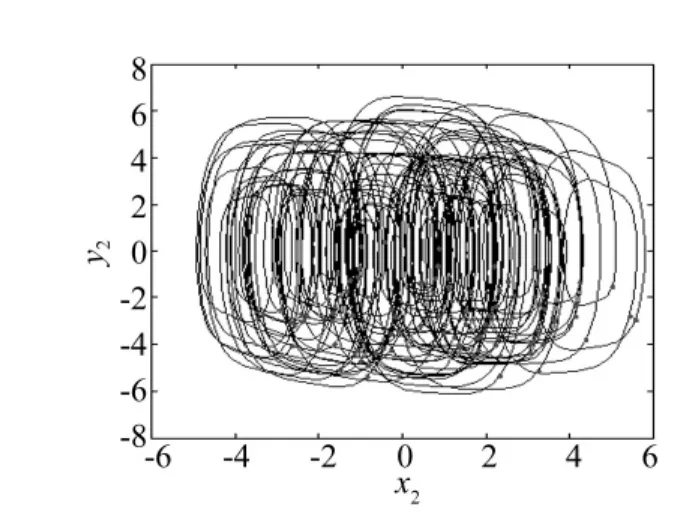
图14 当k=0.001时耦合系统相图Fig.14 The phase diagram of coupled system of k=0.001
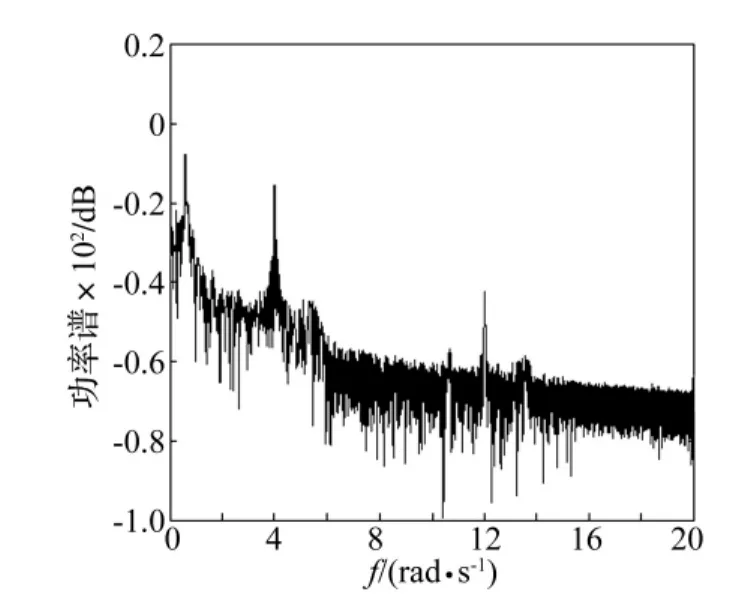
图15 当k=0.001时耦合系统功率谱图Fig.15 The power spectrum diagram of coupled system of k=0.001
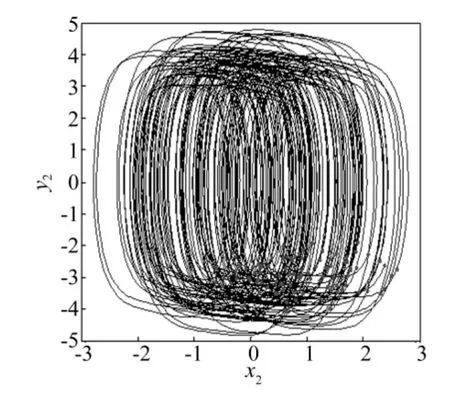
图16 当k=0.003时耦合系统相图Fig.16 The phase diagram of coupled system of k=0.003
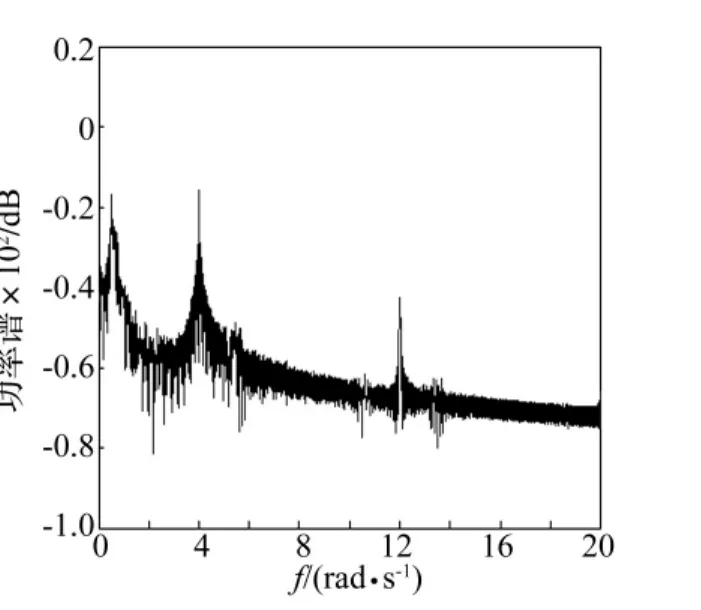
图17 当k=0.003时耦合系统功率谱图Fig.17 The power spectrum diagram of coupled system of k=0.003
3 结论
针对线谱混沌化技术工程化应用的瓶颈问题,即如何在小能量消耗条件下使隔振系统由周期运动状态转变为混沌运动状态。根据船用隔振系统的特点,提出了参数扰动广义混沌同步线谱控制技术,并进行了数值仿真,结果表明:
(1)参数扰动广义混沌同步化控制技术能够利用较小的控制能量使系统由周期状态转变为混沌运动状态,为有效解决线谱混沌化方法工程化应用的瓶颈问题提供了思路。
(2)利用功率谱特性较为平坦的系统作为驱动系统时,受控系统达到混沌运动状态后,不仅线谱强度得到有效控制,整体谱强度均有所降低,提高了舰船的隐身性能。
[1]朱英富,张国良.舰船隐身技术[M].哈尔滨:哈尔滨工程大学出版社,2003.
[2]朱石坚,姜荣俊,何琳.线谱激励的混沌隔振研究[J].海军工程大学学报,2003,15(1):19 -22.ZHU Shi-jian,JIANG Rong-jun,HE Lin.Study on chaotic vibration isolation line spectrum excitation[J].Journal of Naval University of Engineering,2003,15(1):19 -22.
[3] Jiang R J,Zhu S J.Vibration isolation and chaotic vibration[C]//Proceedings of the ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference 2005,Chicago,ASME Press,2005:2375 -2377.
[4] Lou J J,Zhu SJ,He L,et al.Application of chaos method to line spectra reduction[J].Journal of Sound and Vibration,2005,286(3):645 -652.
[5]朱石坚,刘树勇.混沌振动识别的研究[J].武汉理工大学学报(交通科学与工程版),2003,27(6):766-769.ZHU Shi-jian,LIU Shu-yong.Study on chaotic vibration identification[J].Journal of Wuhan University of Technology(Transportation Science & Engineering),2003,27(6):766 -769.
[6] YU Xiang,ZHU Shi-jian,LIU Shu-yong.A new method for line spectra reduction similar to generalized synchronization of chaos[J].Journal of Sound and Vibration,2007,306:835-848.
[7]张振海,朱石坚,楼京俊.基于跟踪混沌化方法的线谱控制技术研究[J].振动与冲击,2011,30(7):40-44.ZHANG Zhen-hai, ZHU Shi-jian, LOU Jing-jun. Line spectra reduction of a vibration isolation system based on tracking chaotification method[J].Journal of Vibration and Shock,2011,30(7):40 -44.
[8]曾强洪,朱石坚,楼京俊,等.基于滑模控制投影混沌同步在隔振系统中的应用研究[J].振动与冲击,2010,29(12):114-117.ZENG Qiang-hong,Zhu Shi-jian,LOU Jing-jun,et al.Study on the application of projective synchronization to vibration isolation system based on sliding mode control[J].Journal of Vibration and Shock,2010,29(12):114 -117.
[9]张振海,朱石坚,楼京俊.基于离散混沌化方法的线谱控制技术研究[J].振动与冲击,2010,29(10):50-52.ZHANG Zhen-hai,ZHU Shi-jian,LOU Jing-jun.A new method of discrete chaotification for line spectra reduction of a vibration isolation system [J].Journal of Vibration and Shock,2010,29(10):50 -52.
[10]张振海,朱石坚,何其伟.基于反馈混沌化方法的多线谱控制技术研究[J].振动工程学报,2012,25(1):30-37.ZHANG Zhen-hai,ZHU Shi-jian,HE Qi-wei.Multi-line spectra reduction of vibration isolation system based on chaotification method[J].Journal of Vibration Engineering,2012,25(1):30-37.
[11]周加喜,徐道临,张月英,等.一种针对未知参数系统的实时混沌化方法[J].振动与冲击,2013,32(4):71-74.ZHOU Jia-xi,XU Dao-lin,ZHANG Yue-ying,et al.A realtime chaotification method for dynamic systems with unknown parameters[J].Journal of Vibration and Shock,2013,32(4):71-74.
