化工驱动系统中无刷直流电机转子监测研究
2014-08-02付光杰赵子明
付光杰 赵子明 邹 伟
(1.东北石油大学电气信息工程学院,黑龙江 大庆 163318;2.大庆中石油昆仑燃气有限公司,黑龙江 大庆 163453)
无刷直流电机既具有优良的转矩特性和宽阔而平滑的调速性能,又克服了机械换向装置固有的缺点,因此在化学反应搅拌、离心分离及反应器均匀加热设备等场合取代了其他种类的电机[1]。但使用位置传感器有许多弊端,传统的无位置传感器技术是通过监测电压或者电流来获得转子的位置信号,这不仅增加了监测装置和连线,同时会使调速系统的电压和电流受到影响,此外还要考虑电机启动的问题[2]。为了更好地实现位置的监测,笔者提出了利用电机转速信号直接进行转子位置监测的方法。
1 传统转子位置监测技术及缺陷①
1.1 无刷直流电机的工作原理
无刷直流电动机的工作原理是,位置传感器提供转子当前的位置信号,控制器根据转子的当前位置输出驱动信号,通过换向驱动电路打开功率逆变桥相应的功率管,从而实现对电机三相绕组的换流控制。三相逆变桥式电路高压侧与低压侧都各有一个功率开关器件导通,构成电流通路,电机产生转矩[3]。
1.2 传统无位置传感器监测方法的缺陷
针对位置传感器所带来的不利影响,无位置传感器技术一直是国内外较热门的研究课题。目前较为成熟的方法是反电动势法。理想情况下,三相星形六状态的无刷直流电机定子反电动势波形如图1所示。

图1 三相反电动势波形
但反电动势法必须求得三相反电动势信号,而在无刷直流电机建模过程中,梯形波反电动势的求取一直是较难解决的问题,反电动势波形不理想会造成转矩脉动增大,严重时会导致换相失败,电机失控。而且监测电压或电流信号不仅需要电压或电流监测硬件设备,还会对电路中的电压或电流产生扰动,影响整个系统的调速精度,此外,当电机启动时没有有效的反电动势,还需研究电机的启动问题。
2 对无刷直流电机转子监测方法的改进
2.1 利用电机转速监测转子的位置
2.1.1改进的位置监测系统构成
在电机调速系统中,往往形成转速闭环。如果能将转速信号同时用于无刷直流电机的转子位置监测,不仅省去了位置传感器、电压或电流监测装置,还提高了转速信号的利用率。最大限度地减少硬件设备和连线,可以使电机进一步小型化,还消除了监测电压或电流信号时对系统产生的扰动,提高了对转速控制的准确性。利用转速信号对转子位置进行监测,就要找出转速与转子位置之间的对应关系,这里用角位移来作为转速与转子位置之间的联系。改进的无位置传感器无刷直流电机的结构框图如图2所示。

图2 改进的无位置传感器无刷直流电机结构框图
2.1.2利用转速监测转子位置的原理
对于三相六状态工作的无刷直流电机,一个运行周期转子转过的空间角度为2π,6个状态分别对应不同的角度范围。不同状态下,相应的开关器件导通或者关断。表1为各开关器件的导通顺序。
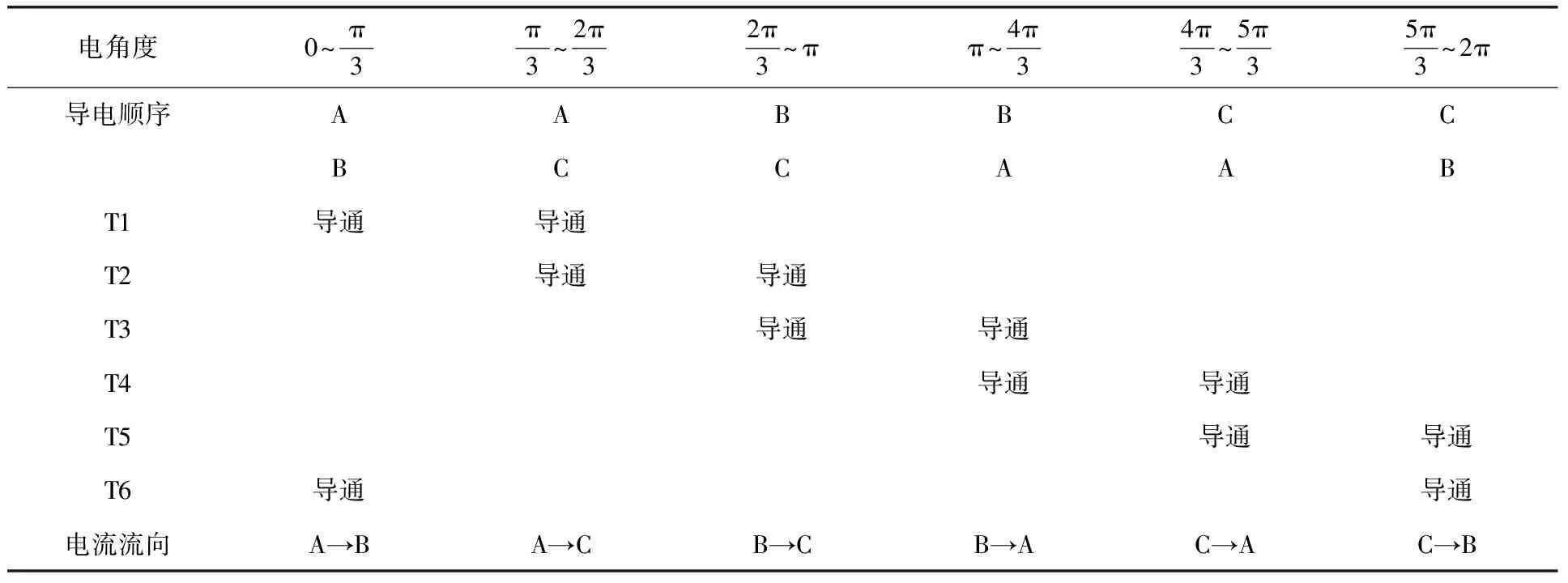
表1 各开关器件的导通顺序
电机启动后,设启动的时刻为0时刻,启动时电机转子所处的位置角度为θ0*,那么随着时间的延长,转子转过的角度也不断增大,当转子旋转一周之后又回到初始位置,即角度为:
θ1*=θ0*+2π
(1)
转子旋转k周所处的位置为:
θk*=θ0*+2kπ (k∈Z)
(2)
在任意时刻转子所处的位置为:
θn*=θ0*+θ*(t)+2kπ (k∈Z)
(3)
这样转子的位置θ*(t)便在0~2π之间进行变化,电机的转速是随时间变化而变化的函数:
(4)
其中,n0为电机启动后t时刻的实际转速,n(t)为电机启动后t时刻的实际角速度,那么电机从启动的那一时刻起,一直到时刻t,在这一时间段内,电机转子所转过的角度共为:

(5)
其中,θ0为假设的0时刻以前电机转子所转过的角度,随着时间的不断延续,电机转过的角度也越来越大,但是电机的转子旋转一周,所转过的角度为2π,为了与转子所转过的角度相对应,可以将电机转子转过的角度θ写成周期函数的形式:
θ=θ0+θ(t)+2kπ (k∈Z)
(6)
将电机转子转过的实际总角度进行脱周期,那么所得到的θ(t)就在0~2π之间反复变化,这样就可以与电机转子转过一周的空间角度为2π相对应,即将θ*(t)与θ(t)相对应,也就确定了转子的位置。
2.1.3转子监测的实现流程
转子位置监测流程如图3所示。

图3 转子位置监测流程
要保证监测转速信号的无位置传感器无刷直流电机的正常启动与运行,只需满足以下两个式子即可:
θ0=θ0*
(7)
θ*(t)=θ(t)
(8)
正常情况下只需在电机启动时满足式(7),那么式(8)便会在电机的运行过程中自动满足,因此在电机启动的时刻满足式(7)是整个转子位置监测的关键。为了满足式(7)的条件,应在整个电机调速系统搭建完毕后进行一次校对,这样整个调速系统便会自动运行,当电机需要再次启动时,可以将前一次停止时刻θ0与θ0*的信息进行存储,这样整个调速系统就可以多次启动和停止。
2.2 转速监测转子位置的实现

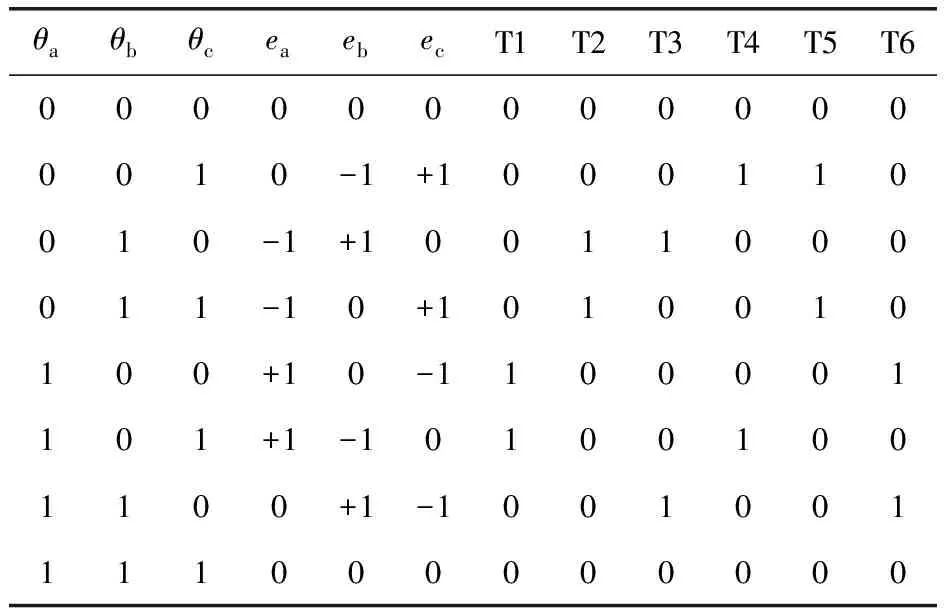
表2 解码器与门极驱动控制器的控制规则
2.3 无位置传感器无刷直流电机调速系统的构建
无刷直流电机与普通直流电机都具有很好的调速性能,使用PI控制就可以基本满足对调速的要求,这里的调速系统使用的是单闭环结构,调速系统的结构框图如图4所示。

图4 调速系统的结构框图
在传统的PI控制中,比例系数Kp与积分系数Ki是固定不变的,但在电机启动的过程中,由于给定转速与电机的实际转速之间相差比较大,采用固定系数的PI控制效果往往不够理想。为了增加调速系统的快速性并增加调速范围,笔者根据电机转速误差的大小来对PI控制参数进行在线调节,误差越大所采用的比例系数越大,这样有利于快速纠正误差,增加系统的快速性。
3 仿真与分析
3.1 仿真模型的建立
利用MATLAB仿真软件建立无位置传感器无刷直流电机转子自监测装置,根据电机的转速判断转子位置的模型如图5所示[6]。

图5 转子位置判断模型
在转子位置监测模块中,需要对电机转子旋转的角位移进行脱周期,使角位移的数值落在一个周期即[0,2π]范围内,这里脱周期采用S函数的方法。在判断转子位置的信号时,同样使用S函数来产生表示转子位置的特征序列。无刷直流电机额定转速为3 500r/min,额定电压为600V,额定负载为10N·m,仿真时间为0.2s,无刷直流电机采用空载状态下启动,在0.1s时加入额定负载并产生扰动。在综合考虑调整时间、超调量、误差与抗扰性的基础上,经过反复测试并在2%的误差允许范围内确定无刷直流电机的调速范围是1 000~3 500r/min。
3.2 仿真
采用转速进行转子位置监测时,在给定转速3 000r/min的情况下,电机的转速波形如图6所示。从图6中可以看出,在利用转速对无刷直流电机进行转子位置监测时,电机可以实现正常稳定运行。图7、8给出了在不同给定转速下的转速波形。从这些转速波形来看,利用转速来对转子位置进行监测的方法可以适用于调速范围比较宽的调速系统中,在较大的调速范围内,这种监测方法都可以保证无刷直流电机稳定运行。

图6 给定转速3 000r/min时的转速波形

图7 给定转速3 500r/min时的转速波形

图8 给定转速1 000r/min时的转速波形
图9给出了在反电动势法监测转子位置的情况下给定转速为1 000r/min时电机的转速波形。在相同的调速系统中,若采用反电动势法对转子位置进行监测,电机在启动时,为了使电机产生有效的反电动势,需要增加一启动电路,这样便会使调速系统的调速效果变差。从图9中可以明显看出,采用反电动势法时,电机转速的超调量变大,而且也没有转速法位置监测时的抗扰动能力强。

图9 反电动势法监测下给定转速1 000r/min时的转速波形
4 结束语
对化工驱动系统中常用的无位置传感器无刷直流电机的转子监测方法进行了研究,提出利用电机转速来对转子位置进行监测的方法。根据电机的转速,计算出电机转子的角位移,对角位移进行脱周期运算,使得角位移数值落在一个周期,即[0,2π]范围内,并根据脱周期后角位移的大小判断出转子的位置,最后根据转子位置来控制无刷直流电机的换相。通过仿真验证了这种转子位置监测方法具有较大的调速范围和很好的抗干扰能力。该方法为无刷直流电机在化工领域更好地应用奠定了基础,也可指导相关的理论研究。
