基于模糊自适应PID控制器的差压式管道检测机器人速度控制系统设计
2014-08-02李著信李媛媛龚利红刘泽山
许 红 李著信 李媛媛 龚利红 刘泽山
(1.解放军后勤工程学院,重庆 401311;2.92635部队,山东 青岛 266000)
差压式管道内检测机器人依靠流体压能和动能产生的推力,随着管内流体的流动而运动,不需要额外能源供应,是一种比较理想的检测装置,具有结构紧凑及无需额外动力源等优点。但长距离油气输送管道,内部空间有限,流体流速不稳定且管道环境较差,机器人的速度波动较大,不但影响机器人检测探头的数据精度,而且在弯管处出现机器人与管壁的撞击将导致检测元件损毁。因此需要加强机器人速度稳定性的研究,设计一个速度控制系统,实现机器人速度可控,运行稳定[1~4]。模糊自适应PID的发展给机器人速度控制技术的发展起到了很好的推动作用[5]。
1 差压式管道检测机器人基本结构和调速原理①
差压式管道机器人由调速盘、机器人本体及
支撑机构等组成,其结构如图1所示。当管内流体速度较低或机器人进入爬坡管道时,会引起机器人速度降低甚至因流体驱动力不足停止前进,可以利用蓄电池的能量驱动调速盘迎流面积变大,获取更大的流体驱动力以保持恒定的速度运行,当机器人的速度高于恒定速度时,减小调速盘迎流面积;当管内流体速度较高或机器人进入下坡管道时,会引起机器人速度过快,首先可以通过减小调速盘迎流面积来减小驱动力,其次可以增大支撑机构与管壁的摩擦力以获得较大的摩擦阻力来降低机器人的速度。每组支撑机构有3套支撑组件,包括电磁铁、刹车元件、支撑轮和机身支撑杆,每个支撑组件之间的角度为120°,均匀地分布在机器人本体上。

图1 差压式管道检测机器人结构示意图
2 速度控制系统和控制流程
速度控制系统由以下几部分组成:直径大小可调的调速盘机械机构、刹车组件、控制部件和反馈部件。直径大小可调的调速盘机械机构包括:步进电动机、传动螺杆和调速盘。控制部件包括:控制器和数字控制电路。反馈部件包括:速度传感器及位置传感器等。刹车组件由电磁线圈、弹簧、支撑轮、刹车元件及机身支撑杆等组成。
机器人放进管道以后,速度传感器发出模拟信号,经过模/数转换,数字信号输入到控制器,控制器处理速度信号以后,计算出当前工作间隙的大小,控制步进电动机正向或反向转动的角度,由传动螺杆带动推拉杆动作,从而达到控制变速翼与管道之间间隙的目的,再通过位置传感器的测量,反馈给处理器,计算出控制后的间隙值与预期的间隙值之差,再控制步进电动机来调整间隙,通过闭环控制,精确调节间隙和摩擦因数,最终实现控制机器人的速度。速度控制系统方框图如图2所示。
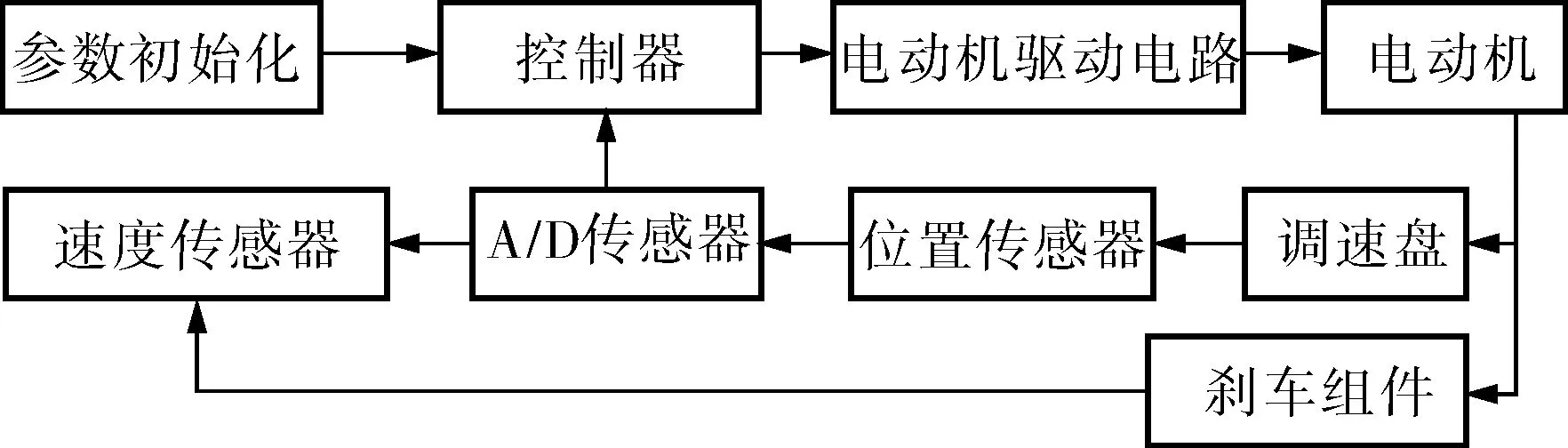
图2 速度控制系统方框图
首先,配置好机器人开始的工作状态,包括机器人本体质量、调速盘的直径大小、每个脉冲对应调速盘的大小和电磁铁通电量分别对应的机器人运行速度的范围。
当管道环境发生变化时,通过速度传感器采集一定时间内当前机器人的移动速度,然后判断当前机器人速度是否在正常工作速度范围内。当机器人速度过快时,则根据偏离的速度值计算出需要改变的电磁铁通电量,同时将调速盘直径调至最小;当机器人速度过慢时,则根据偏离的速度值计算出需要改变的调速盘直径大小,同时关闭通电线圈。机构控制方法及其流程如图3所示。为了精确控制调速盘直径大小或电磁铁通电量,防止步进电动机发生失步现象,采用了闭环控制,通过传感器的信号,计算出实际的调速盘直径大小或电磁铁通电量是否达到了预期的理论控制值,再修正步进电机的脉冲数,最终得到准确的参数,完成以后,更新当前的参数。

图3 速度控制流程
3 基于模糊自适应PID的速度控制器设计
3.1 模糊自适应PID速度控制器原理
应用自适应控制思想,将模糊控制[6]和PID[7]控制相结合就构成了模糊自适应PID控制。其原理是运用基于模糊理论的模糊控制器,根据人工控制经验对PID控制器的Kp、Ki、Kd3个参数进行整定[8,9]。
(1)
(2)
(3)

图4 管道机器人速度模糊自适应PID控制器结构
3.2 模糊语言变量的确定
把速度误差e和误差变化率ec的精确值作为输入语言变量,ΔKp、ΔKi、ΔKd作为输出语言变量。把输入语言变量的模糊输入空间定义为输入变量的基本论域,输出语言变量的模糊输出空间定义为输出变量的基本论域。设速度误差e的模糊基本论域为[-m,-m+1,…, 0,…,m-1,m],误差变化率ec的模糊基本论域为[-n,-n+1,…, 0,…,n-1,n,],输出控制变量ΔKp、ΔKi、ΔKd的模糊基本论域为[-k,-k+1,…,0,…,k-1,k]。模糊子集为{NB,NM,NS,ZO,PS,PM,PB},分别表示{负大,负中,负小,零,正小,正中,正大}。这种划分能够满足该速度控制系统对较高品质的要求。
3.3 隶属函数的确定
模糊化的实质就是找出输入精确量对应的每个模糊子集的隶属函数值。隶属函数常用来表征模糊集合,确定隶属函数和各个语言值的隶属度就定义了一个模糊集合。隶属函数一般是离散的,也可以是连续的。各模糊状态的隶属函数有正态形、对称三角形及对称梯形等。对称三角形隶属函数其形状只与它的直线斜率有关,运算量小,所占内存空间也小,因此比较适合有隶属函数在线调整的模糊控制。在此选三角形为语言变量的隶属函数。输入e、ec,输出ΔKp、ΔKi、ΔKd的隶属函数曲线分布如图5所示。

图5 e、ec、ΔKp、ΔKi、ΔKd的隶属函数
3.4 模糊推理
控制规则是模糊控制器的核心。对于模糊自适应PID控制器,速度误差e和误差变化率ec在控制过程中对PID控制参数影响的基本规律为:
a. 误差e较大时,为加快系统稳定速度,应取较大的Kp,消除偏差,同时Kd值应取小一点以避免e变大引起的微分饱和,对于Ki值应趋于零,避免系统产生较大超调;
b. 误差e为中等值时,Kp应取一个较小值以减小超调,同时Ki、Kd取合适的值;
c. 误差e较小时,为提高系统的稳态性能,Kp、Ki取值应大一些,同时Kd取一个合适的值。
根据上述e、ec对PID参数调整的基本规律,结合差压式管道机器人在运行过程中的实际经验,可以设计出管道机器人速度模糊自适应PID控制器模糊规则表。根据模糊控制规则表对速度误差e和误差变化率ec进行模糊推理,就可以得到输出ΔKp、ΔKi、ΔKd的模糊集合。目前,使用较多的模糊推理方法有Baldwin法、Zadeh法及最大值最小值法等。管道机器人速度模糊自适应PID控制器采用最大值最小值法进行模糊推理,主要步骤为:
a. 计算速度输入量e、ec的隶属度。
b. 求前件部隶属度。选取速度输入量e、ec隶属度最小值为最终的前件部隶属度。
c. 求有效的后件部隶属函数。以前件部的隶属度切割后件部的隶属函数,获得有效的输出结果。
d. 计算总结。综合逻辑和运算所有结论,得到最终推理结果。
通过以上几个步骤,利用e、ec的隶属函数和ΔKp、ΔKi、ΔKd的模糊规则表最终求得ΔKp、ΔKi、ΔKd的模糊集。
3.5 解模糊
模糊推理得到的是模糊输出量,而速度控制执行机构只能对清晰量进行识别,因此控制器必须把模糊量进行解模糊,使其转化为精确量。解模糊化是模糊化的逆过程,加权平均法是模糊控制系统中应用比较广泛的解模糊方法[10],即:
(4)
其中,yi为输出模糊集合的第i个隶属度值,也可称为加权系数;ki为输出模糊集合的第i个隶属函数的权重。
实际处理中,上面的计算都是离线进行的,制成控制决策表并存放在计算机中,在控制过程中采用查表法来读取数据,减少了在线计算时间,提高了系统的实时性。
4 结束语
在差压式管道检测机器人的基本结构与调速原理的基础上,依据其速度控制流程,应用模糊自适应理论,结合模糊控制与PID控制,设计了能满足差压式管道机器人速度检测需求的速度控制器,为进一步开发差压式管道检测机器人速度模拟仿真系统提供了理论依据。
