一种基于三棱锥模型的射界监控方法
2014-07-03余凯平魏传庭
余凯平,陈 栋,高 斌,魏传庭
(陆军军官学院,合肥 230031)
在牵引火炮实弹训练及考核过程中,经常存在由于炮手误操作导致火炮瞄准超出安全射界、射弹超出安全区的事故,对弹着区附近的警戒及地方人员生产生活造成较大的生命和财产威胁,通常要采取一定的措施对火炮安全界加以限制,保证火炮实弹射击安全[1,2]。目前限制火炮安全界的方法有齿弧限位块法、身管立杆限位法、图像识别法和经纬仪测量法等[3-5],结合以上方法的工作原理及优缺点,文章提出了一种基于三棱锥模型的火炮安全射界监控系统,并利用Matlab 软件进行计算仿真,从而验证其工作原理及可行性。
1 安全射界监控方法原理
安全射界监控系统组成如图1 所示,两拉绳7 一端缚在火炮摇架2 上,另一端连接两拉绳编码器6,两拉绳编码器连接球铰座5 并安装在火炮下架4 上。当火炮身管运动时,拉绳作伸展和收缩运动,一个内部弹簧保证拉绳的张紧度不变,拉绳编码器通过带螺纹的轮毂带动精密旋转感应器旋转,始终输出一个与绳索移动量成正比例的电信号,测量输出信号可以实时测量拉绳移动的位移、方向或速率[6]。因此,在身管作高低俯仰和方向转动时,通过采集两根拉绳长度的变化量,实时计算火炮身管实际被赋予的射角和射向,对超出安全射界的操作进行报警,从而保证实弹射击安全。
2 安全射界监控方法数学模型的建立
建立如图2 所示三棱锥数学模型,O 点为身管耳轴和立轴中心交叉点,身管绕O 点作俯仰和回转运动,A、B 2 点为拉绳编码器安装点,C 点为两拉绳与身管轴线交汇点。AC、BC 表示两拉绳,OC 为身管轴线,当身管作方向和高低瞄准时,拉绳AC、BC 的长度发生变化,通过拉绳编码器实时测量,AC、BC 的长度认为是已知的。
在三棱锥O-ABC 数学模型中,已知4 条棱边OA =a,OB=b,OC=c,AB=d,其夹角∠AOB=α,∠BOC=β,∠COA=γ,实际测得AC=e,BC=f,则根据余旋定律求得α,β,γ,显然有:α、β、γ∈(0,π),α+β+γ∈(0,2π)。

图1 安全射界监控系统组成
2.1 身管高低射角计算
以三棱锥O-ABC 的顶点O 为坐标原点,以OA 为x 轴正向,以垂直于△OAB 所在的平面的方向为z 轴建立右手空间直角坐标系Oxyz,如图2 所示。

图2 高低射角计算模型
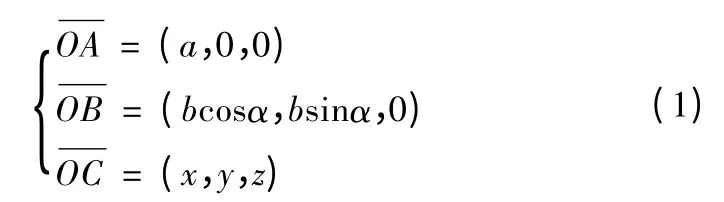
其中x、y、z 为未知数,将这些向量代入如下向量方程组

便得到如下关于x、y、z 的代数方程组


那么,身管高低射角θ 为
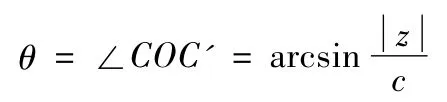
在a、b、c、d 已知的情况下,θ 是关于两拉绳长度e、f 的函数。
2.2 身管方向射角计算
如图3 所示,过C 作△OAB 的垂线,垂足为C',过C'作OA 的垂线,垂足为C″,那么CC″垂直于OA。

图3 方向射角计算模型
方向射角ω 为
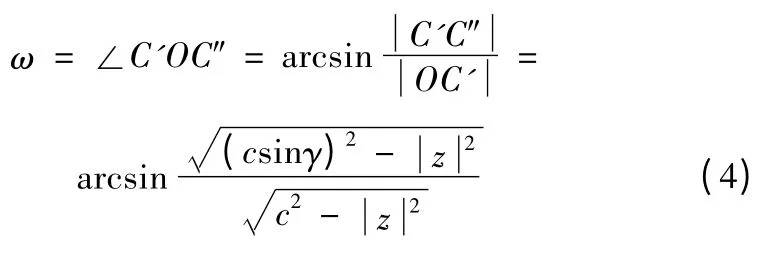

由式(4)可知,在a、b、c、d 已知的情况下,方向射角ω 也是关于两拉绳长度e、f 的函数。
因此,通过精确测量两拉绳的长度e 和f 的长度,就可计算并监控火炮身管任意状态下高低射角和方向射角。

图4 身管高低射角计算仿真
3 安全射界监控模型仿真分析
根据已建立的三棱锥数学模型,编写Matlab 程序[7],设定仿真参数a=1、b=1、c =1、d =0.5,依据三棱锥4 个面上各条边的三角形边长关系,则e =0:step:2,f =0:step:2,取step=0.01,仿真计算结果如图4 和图5 所示。

图5 身管方向射角计算仿真
3.1 身管高低射角计算仿真
图4 所示为身管高低射角计算仿真图,高低射角θ 随着e、f 的取值变化而变化,当某一拉绳长度为零时,高低射角θ=0,当e=f =1.41 时,高低射角θ 取极大值接近90°,仿真显示身管高低射界为θ=0 ~90°,满足普通牵引火炮正向极限高低射角的监控,虽然不能检测负向高低射角,但实弹射击训练中通常不采用。身管高低射角计算仿真图中没有交叉重叠,高低射角θ 随着e、f 的变化取值唯一,通过监测拉绳e、f 的大小来监控高低射角θ 是可行的。
3.2 身管方向射角计算仿真
图5 所示是身管方向射角计算仿真图,方向射角ω 随着e、f 的取值变化而变化。图形中标示出2 个极值大点ω≈90°,两极值点的连线构成仿真图的脊背,表示在不同高低射角的情况下对应方向射角的极大值点,显然图5 中方向射角的极小值点ω≈0°。数学模型中方向射角为OC'和OC″的夹角,C'可能在三棱锥底面AOB 里面或外面,OC″三棱锥OA 边上固定不变,因此,仿真图中以C'点在OA 边上(即ω≈0°)为界,分为两大部分。由于每个部分均存在极值大点ω≈90°,所以身管方向射界为ω=0 ~180°满足普通牵引火炮方向射角的监控。身管方向射角计算仿真图中没有交叉重叠,方向射角ω 随着e、f 的变化取值唯一,通过监测拉绳e、f 的大小来监控方向射角ω 是可行的。
4 结束语
介绍了一种火炮安全射界监控方法的组成及工作原理,并建立火炮安全射界监控系统的三棱锥数学模型,分别计算火炮高低及方向射角,利用Matlab 软件编程仿真,得到高低、方向射角均为关于两拉绳e、f 的函数,并且取值唯一。因此,可以通过精确测量两拉绳e、f 的大小,实时计算火炮高低和方向射角,达到监控火炮安全射界的目的。
[1]张彦斌.火炮控制系统及原理[M],北京:北京理工大学出版社,2009.12.
[2]刘成海,任庆洋,陈栋良.标示禁射界和射界注意的事项[J].现代兵种,2008(9):18.
[3]裴晓龙,刘军.自行火炮自动调炮精度检测方法[J].炮学杂志,2010(6):117-118.
[4]刁中凯,蒋永瑜.火炮调炮精度检测技术[J].四川兵工学报,2008,29(2):48-50.
[5]罗鸿飞,张英堂,任国全,等.基于空间坐标解算的火炮调炮精度检测方法研究[J]. 火炮发射与控制学报,2007,12(3):50-52.
[6]赵学增.现代传感技术基础及应用[M].北京:清华大学出版社,2010.
[7]敬照亮.MATLAB 教程与应用[M].北京:清华大学出版社,2011.
