分布式粒子滤波算法在目标跟踪中的应用
2014-07-01史健芳
谷 静, 史健芳
(太原理工大学 信息工程学院,山西 太原 030024)
分布式粒子滤波算法在目标跟踪中的应用
谷 静, 史健芳
(太原理工大学 信息工程学院,山西 太原 030024)
针对无线传感器网络中目标跟踪的精度与网络能耗这一对矛盾,提出了一种改进的分布式粒子滤波算法。通过调整滤波器的似然分布保持粒子的多样性,同时将无线传感器网络中的跟踪机制进行改进,采用根据跟踪精度自适应调整动态簇内工作的传感器节点的数目。仿真结果表明:提出的改进算法在提高跟踪性能的同时减少了能量损耗,延长了网络的使用寿命。
无线传感器网络; 粒子滤波; 能量损耗
0 引 言
移动目标跟踪是无线传感器网络(wireless sensor networks,WSNs)的研究热点之一[1],在设施管理、物流管理、健康服务等方面有着广泛的应用前景。开发基于无线传感器网络的跟踪系统时,出现了2个具有挑战性的问题:一是如何改进现有的滤波算法使跟踪更加精确;二是如何权衡其跟踪精度与资源有限的问题,如能量、带宽等[2]。由于节点的计算、感知和通信都由电池供电且通信带宽有限,所以,大量文献研究了如何平衡跟踪精度与能量消耗这一对矛盾[3]。文献[4]提出了分布式动态簇跟踪算法,在每一时刻唤醒目标周围的一部分节点对目标进行跟踪,其余节点进入休眠状态,与集中式跟踪算法相较,节省了大量节点的能量消耗,有效延长了网络使用寿命,节省资源空间。文献[5]中提出一种可扩展的动态平均一致卡尔曼滤波算法,仿真结果指出,平均每一时刻工作的传感器节点个数为6.39个。但是,卡尔曼滤波只适用于高斯白噪声,对环境要求较高。
本文研究了分布粒子滤波算法在无线传感器网络中的应用,粒子滤波算法无须假设高斯噪声,理论上对任何模型都适用,尤其对非线性问题有比较好的性能。同时本文提出了一种分布式跟踪机制,能够减少动态簇中工作的传感器节点数目,从而节省网络中的能量损耗。
1 无线传感器网络中的目标跟踪
在一个无线传感器网络中,称一个移动的物体为目标,目标发出的信息用来表征和识别目标。一个传感器节点有3种状态:活动状态、休眠状态、唤醒状态。当一个传感器在活动状态时,它可以感知到目标,随时接收或者传送数据;而处于休眠状态时,它停止感知目标,停止接收或者传送数据。一只传感器在预定义的时间内周期性地从睡眠状态改为唤醒状态。在唤醒状态,传感器收听检查请求或唤醒包,如果在该状态接收到一个唤醒包,它的状态会变成活动状态;如果在规定时间内没有转变成活动状态,那么它将进入睡眠状态。假定传感器网络是同步的,传感器定期同步唤醒或休息。传感器可以准确地检测一个目标的位置,每一个节点可以通过全球定位系统(GPS)或者其他机制知道自己的位置信息。每一个节点的通信范围和感知范围都是一样的,本文假设传输距离是2倍的感知距离[6],在这个范围里,传感器可以合作地跟踪一个目标,当目标离开传感器X的感知范围移动到Y的感知范围,这个范围比保证了X和Y是邻居节点。传感器X可以直接告知传感器Y有关目标的信息,传感器网络便可以合作地跟踪目标。
当目标进入无线传感器网络中,第一个检测到目标的传感器作为簇头节点,与其余检测到目标的簇成员节点组成一个动态簇。本文选择采用对硬件要求较低的接收信号强度指示(received signal strength indication,RSSI)极大似然估计算法得到目标的最新状态量测值。簇头节点接收成员节点发送来的量测值,并进行分布式粒子滤波算法,对目标此刻的状态值进行估计并预测下一时刻的状态值。
2 分布式粒子滤波算法
1)首先,进行采样得到样本粒子并对重要性权值进行初始化,得到采样粒子相应的权值,设为等权值粒子,如式(1)和式(2)所示
{x(k-1,i),i=1,…,Ns}→q(k-1,k-1),
(1)

(2)
其中,q()表示重要性函数,Ns表示采样粒子数。
2)状态更新和权值更新
利用状态方程和量测方程进行状态更新和量测更新,并对更新后的权值进行归一化,分别如式(3)、式(4)和式(5)所示
{x(k,i)=f(x(k-1,i),w(k-1,i),k-1),i=1,…, Ns},
(3)

(4)

(5)
3)重采样
剔除较小权值粒子,复制大权值粒子,重新设定粒子的权值

(6)
4)状态更新

(7)
3 改进的分布式粒子滤波算法
3.1 粒子滤波算法的改进
改变粒子的权值即可改变似然函数的分布,使粒子向似然函数的峰值区移动,从而增加粒子的有效性。本文设定了一个自适应变量μ=|Rν|(其中,R为量测噪声协方差的值;ν为残差值,即量测值与估计值之差),来调整权值的大小即调整采样粒子的分布。μ值是随着残差大小的变化而变化的。当系统噪声较高时,利用最新量测值计算得到的残差ν来计算μ的值使采样得到的粒子更加有效,从而减弱了滤波过程中出现的粒子匮乏问题。该算法具体的计算步骤如下:
1)初始化
构造采样点集{x(k-1,i),i=1,…,Ns}和初始重要性权值

(8)
2)滤波
计算重要性权值

(9)
归一化得到接收概率
(10)
输出

(11)
3)重采样:同标准粒子滤波;
4)预测

3.2 跟踪机制的改进
1)节点唤醒
当t=k时,根据t=k-1时刻的预测值唤醒目标周围的传感器节点。其中第一个检测到目标的传感器节点作为簇头节点CH(k),其余检测到目标的传感器节点作为簇成员节点。
2)接收信息

3)信息处理
4 仿真实验
为了验证本文提出的基于精度的节点最少动态簇定位跟踪算法的有效性,在Matlab软件上做了以下仿真。假设在100m×100m的区域内随机布设了100个传感器节点,每个传感器节点的检测半径与通信半径均为20m。一个目标在该区域内做匀速运动,速度为[vx,vy]=[1.5,0.6]/ms,目标初始位置为(50,80)m,在1~34s和68~100s内做右转弯运动,在35~67s内做左转弯运动,转弯角速率为7.45°/s,传感器采样周期为1s。仿真结果如图1~图3。
图1表示了在布设有传感器节点的网络环境内目标运动的轨迹,标准粒子滤波算法和改进后的粒子滤波算法估计结果;图2表示了每一时刻内工作的传感器个数(默认在通信半径内的传感器都能接收到目标传来的信号并正常工作);图3表示了标准粒子滤波算法和改进后的粒子滤波算法误差比较。
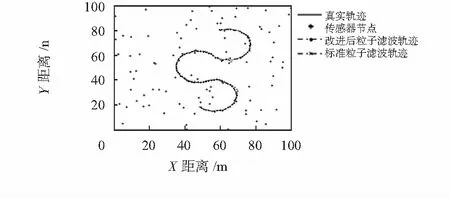
图1 目标运动轨迹Fig 1 Moving trajectory of target

图2 标准分布式与改进的分布式算法在每一 时刻工作的传感器节点数目Fig 2 Number of working sensor node of standard distributed and improved distributed algorithms at each moment

图3 标准粒子滤波与改进的粒子滤波跟踪误差结果比较Fig 3 Result comparison of tracking error of standard PF and modified PF
从图2中可以看出:采用本文提出的改进的分布式算法,在满足一定精度的前提下,每一时刻工作的传感器节点数目少于等于标准的分布式定位算法。例如:在t=[20,40]s的范围内,采用标准的分布式定位算法,每一时刻工作的传感器个数达到12个左右,而采用了本文提出的改进算法后,传感器仅需要3个,很大程度上减小了网络能量中的损耗。在图3中也可以看到:使用本文提出的改进粒子滤波算法的跟踪结果优于标准粒子滤波算法,减小了跟踪误差。
5 结 论
本文研究了分布粒子滤波算法在无线传感器网络中的应用,并提出了一种改进的分布式粒子滤波算法,首先,通过根据残差设定的适应系数μ来调整似然函数分布,增加采样区域和高似然函数区域的重叠区域,使采样得到的粒子更加有效,有助于改善粒子滤波的滤波性能使得跟踪效果更加稳定;然后,通过改进无线传感器网络中的跟踪机制,使动态簇中工作的传感器个数得到了最大的降低。通过仿真实验证明:该算法在提高目标跟踪精度的同时降低了无线传感器网络的能量消耗,延长了传感器网络的使用寿命,符合无线传感器网络低功耗的特点,可以应用在无线传感器网络环境下的非线性非高斯的目标跟踪中。
[1] 孙利民.无线传感器网络[M].北京:清华大学出版社,2005.
[2] 高庆华,金明录.一种基于概率密度传播的目标跟踪算法[J].电子与信息学报,2010,32(10):2410-2414.
[3] Oualid Demigha,Walid-Khaled Hidouci.On energy efficiency in collaborative target tracking in wireless sensor network:A re-view[J].IEEE Communication Surveys & Tutorials,2013,15(3):1210-1222.
[4] 刘立阳,张金成.基于分布式动态簇结构的WSNs自适应目标跟踪算法[J].传感技术学报,2012,25(1):110-113.
[5] 龙 慧,樊晓平,刘少强.无线传感器网络可扩展一致性目标跟踪算法研究[J].小型微型计算机系统,2012,33(11):2429-2434.
[6] Jing Teng.Distributed variational filtering for simultaneous sensor localization and target tracking in wireless sensor networks[J].IEEE Transaction on Vehicular Technology, 2012,61(5):2306-2318.
Application of distributed particle filtering algorithm in target tracking
GU Jing, SHI Jian-fang
(School of Information Engineering,Taiyuan University of Technology,Taiyuan 030024,China)
Aiming at contradiction of tracking precision and energy consumption of target tracking in wireless sensor networks(WSNs),an improved distributed particle filtering(PF)algorithm is proposed.It can keep the variety of the particles by adjusting likelihood distribution of filters and meanwhile the tracking mechanism is also improved,and it can adaptively adjust number of working sensor nodes in dynamic cluster according to the tracking precision.The simulation result shows that the proposed improved algorithm not only improve tracking quality but also reduces energy consumption and prolongs lifetime of network.
WSNs; particle filtering(PF); energy consumption
10.13873/J.1000—9787(2014)08—0158—03
2014—01—11
TP 301.6
A
1000—9787(2014)08—0158—03
谷 静(1988-),女,山西阳泉人,硕士研究生,主要研究方向为目标跟踪与无线传感器网络。
