钢轨打磨车用波磨轨廓检测装置研究
2014-06-28冷淑妍周高伟
冷淑妍 周高伟
(北京二七轨道交通装备有限责任公司机车研发中心,100072,北京∥第一作者,工程师)
由于列车的动力作用,以及自然环境和钢轨本身质量等原因,钢轨经常会发生损伤,如横断面的磨损、波浪磨耗(简称“波磨”)等现象,使轮轨接触面的状况进一步恶化,造成钢轨寿命减少、养护工作量加大、养护成本增加。钢轨波磨是产生噪声和引起轮轨相互作用力变化的主要原因之一。特别是近几年来,随着高速、重载轨道交通的快速发展,钢轨波磨和冲击日益严重,这不仅加剧了轨道结构部件的伤损和轨道状态的恶化,而且严重影响了钢轨的使用寿命,甚至危及行车安全。为此,钢轨的检测和打磨成为一个亟待解决的问题。
铁道科学研究院、铁道部基础设施检测中心开发和生产的铁路轨道检测装置,用于对线路的检测和评价,提出线路维护的要求,是具有相应的技术和工业化应用的产品,安装在专用的铁路轨道检测车上。但打磨作业车辆专用的检测装置产品非常少,仅有SPENO 等少数公司拥有相应的产品和技术。此类产品都采用接触式位移传感器作为波磨检测,采用激光传感器作为轨廓检测,采用柔性结构的小车安装传感器作为执行机构。
本课题所研制的装置,安装于打磨车上,主要采用非接触式激光传感器三角测量法进行轨廓检测,采用激光传感器不等弦测量法进行波磨检测,借助CAN(控制器局域网)总线技术,开发了相应的软件,对激光测量数据进行了分析处理。
1 波磨、轨廓检测装置简述
波磨、轨廓检测装置由柔性机械结构与执行机构,波磨、轨廓检测系统,CAN 总线网络系统,以及软件系统等4 个系统组成,如图1所示。
(1)柔性机械结构与执行机构(以下简称“检测小车”)。机械结构比较复杂,不仅要具备升降功能,同时要能跟踪钢轨做横向运动。其作用是:为轨廓检测传感器、波磨检测传感器、速度检测装置、气缸及阀、限位开关提供安装位置;横向4 个气缸加柔性装置实现跟踪钢轨的横向运动,跟踪钢轨运动,使轨廓检测传感器和波磨检测传感器始终跟踪钢轨而不至于超出检测范围;保证车体与小车的相对位移,使得检测装置可以安全通过曲线。
(2)波磨、轨廓检测系统。由2 只轨廓检测激光传感器、6 只非接触波磨检测激光传感器、1 台检测计算机、2 个紧急切断开关、1 台打印机,以及液晶显示屏、键盘鼠标等组成。
(3)CAN 总线网络系统。
(4)以Labview 为平台的软件系统。
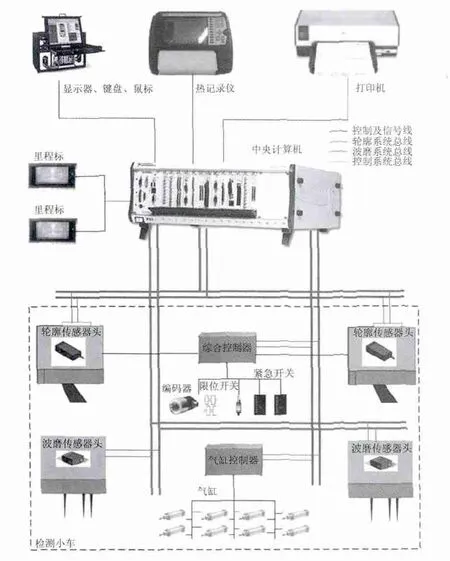
图1 检测装置系统图
2 波磨、轨廓检测装置各系统分析
2.1 柔性机械结构与执行机构的组成
柔性机械结构与执行机构包括主结构、速度检测装置、跟踪装置和驱动装置。其整体效果图如图2所示。
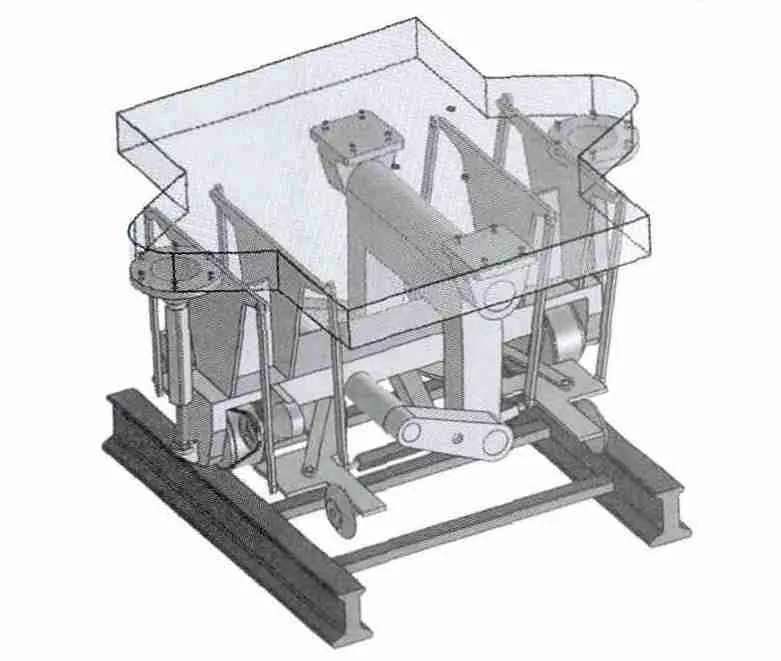
图2 检测小车
(1)主结构:由主支架、导向轮、限位开关等部分组成。主支架是检测小车的主体,支撑整个小车,并为小车上下、横向运动提供结构上的支持;导向轮是行走部件,支撑主支架,在气缸及重力的作用下紧贴轨道;限位开关用来确定检测小车在提升时是否到达预定位置。
(2)速度检测装置:导向轮通过齿轮传动带动速度检测齿轮,速度检测齿轮带动编码器转动,编码器输出脉冲数与导向轮行走的距离成正比,单位时间内的编码数即为速度信号。
(3)跟踪装置:跟踪小轮与传感器支架联动,在气缸推动下,跟踪小轮紧贴轨道内侧,从而保证波磨传感器的检测点始终保持在轨道的中心线上,保证轨廓传感器头也始终跟踪钢轨,而不会超出其检测范围。
(4)驱动装置:利用压缩空气,通过控制阀驱动气缸做活塞运动。驱动装置由8 个气缸及相应的阀组成。
检测小车在不工作时需要提升脱离轨道,在工作时需要下降到轨道上。提升和下降运动由2 个气缸驱动。跟踪装置是4 个气缸推动柔性连杆机构横向运动,将小轮始终贴合轨道,使轨廓检测传感器和波磨检测传感器始终跟踪钢轨而不至于超出检测范围;当检测小车不进行作业时,有2 个气缸用来锁定脱离轨道升起的检测小车,阻止各方向的运动。
2.2 波磨、轨廓检测系统
2.2.1 波磨、轨廓激光传感器
波磨检测采用三点偏弦测(不等弦)法,每根轨道采用3 只1D 激光传感器。采用增量式编码器分别进行空间等距离采样控制,其采样步长为5 mm。检测的钢轨波磨数据通过CAN 总线传送到中央控制单元。
轨廓激光传感器在每根轨道使用1 只2D 激光传感器,检测时,采用增量式编码器分别进行空间等距离采样控制,其采样步长为250 mm;每个传感器接收综合控制器的触发信号后,产生一束强度可调的激光照射运行中的铁轨表面,铁轨的位置数据通过轨廓CAN 总线传送到中央控制单元。
2.2.2 中央控制单元
中央控制单元包括CPU 模块、CAN 总线控制模块及外设单元。波磨、轨廓检测系统共用该部分的CPU 模块。
2.2.3 综合控制器
综合控制器在波磨检测系统中的作用是:给激光传感器供电;采集紧急切断开关信号;采集编码器信号;通过CAN 总线与中央处理单元通信。
综合控制器的存在,使得系统的电源管理成为可能,当采集到紧急切断开关信号后可以立即断开波磨传感器的电源,并且可以将当前的状态上传到中央控制模块;综合控制器的存在,也符合就近控制就近采集原则,符合分布式控制原则。综合控制器的控制对象全部位于检测小车的周围,就近控制可以减少连线,降低复杂性,同时使系统结构更加简洁和紧凑,提高了系统的可靠性、可测试性和可维修性。
2.3 CAN 总线网络系统
CAN 总线系统包括11 个总线节点,分别为中央计算机、轨廓传感器左、轨廓传感器右、波磨传感器左1、波磨传感器左2、波磨传感器左3、波磨传感器右1、波磨传感器右2、波磨传感器右3、气缸控制器、综合控制器。CAN 总线系统如图3所示。
2.4 软件系统
软件系统是以LABVIEW8.0 为平台,进行图形化编程开发。其主要子系统是数据采集与处理子系统以及测量显示子系统。数据采集与处理子系统包括轨廓检测数据采集与处理模块以及波磨检测数据采集与处理模块。这两个模块通过轨廓波磨传感器进行数据实时采集,通过CAN 接口采集到PXI 中央处理器,经过算法处理后,还原钢轨表面真实数据,并在显示界面显示轨廓图形。这两个模块采集的原始数据和处理后的数据均能存储到指定位置。
测量显示子系统提供了一个用户使用和管理的人机交互界面,将各种数据向用户展示,并且接受用户对系统的控制与输入。该界面友好,提供丰富的操作菜单、数据信息和实时显示测量图形。图4 为检测数据显示界面。
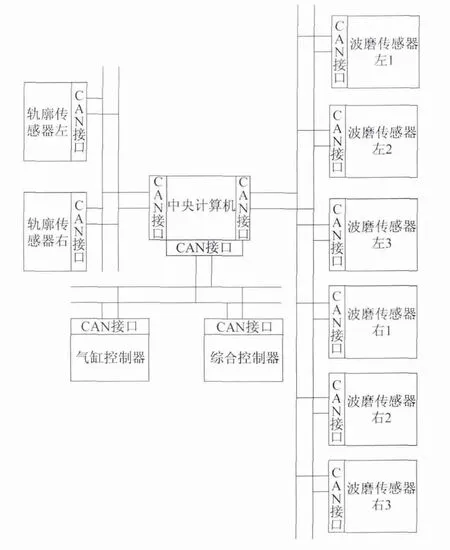
图3 CAN 总线系统
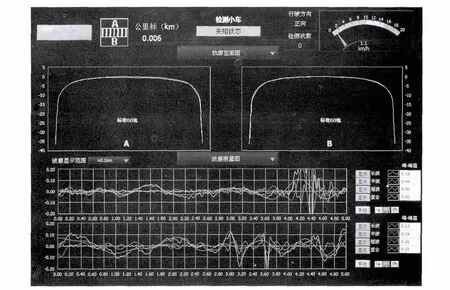
图4 检测数据显示界面
2.5 检测数据分析
该检测装置主要对50 kg/m,60 kg/m,75 kg/m钢轨的轨道进行检测。图4 显示的数据为60 kg/m钢轨的轨廓检测(横断面)数据和钢轨波磨(不平顺)检测数据。
轨廓检测数据处理主要是通过对测量得到的轨道型面和标准轨型面进行对比。其中,图4 上半部分A 、B 曲线分别表示左边轨道(简称“左轨”)和右边轨道(简称“右轨”)检测的横断面。A、B 断面曲线分别有2 条:标准轨横断面和磨损后轨道的横断面。其标准断面数值是对标准钢轨断面设计图进行离散化处理后得到的数据曲线;磨损后的轨道断面曲线是由激光传感器测量得到。将测量数据经过坐标转换处理后,与标准轨数据处于同一坐标系下进行比较,从而为轨道养护人员提供打磨数据。
图4 下半部分的波磨检测数据,主要是通过三点偏弦(不等弦)测量法得到不平顺数值,通过傅里叶级数的展开、合成法得到不平顺函数,复原波形,最终得到轨道形状。但目前国内并没有实施轨道短波不平顺的标准,为此借鉴国外经验,在程序处理时,将复原波形按照短波(30~100]mm、中波(100~300]mm、长波(300~1 000]mm 的波段范围进行滤波处理。分级滤波通过Matlab 算法实现。
欧洲铁路在对现场钢轨打磨、铣磨合轨道计划作业验收中,规定从3 个波长范围对打磨作业后钢轨表面纵向平顺状态进行评价验收,如表1所示。
结合国内外资料,对钢轨波磨打磨后的质量验收标准建议如下:波长(30~300]mm,波磨幅值不大于0.04 mm;波长(300~1 000]mm,波磨幅值不大于0.2 mm。输出波磨检测数据和建议值比较,从而为轨道养护人员提供数据支持。
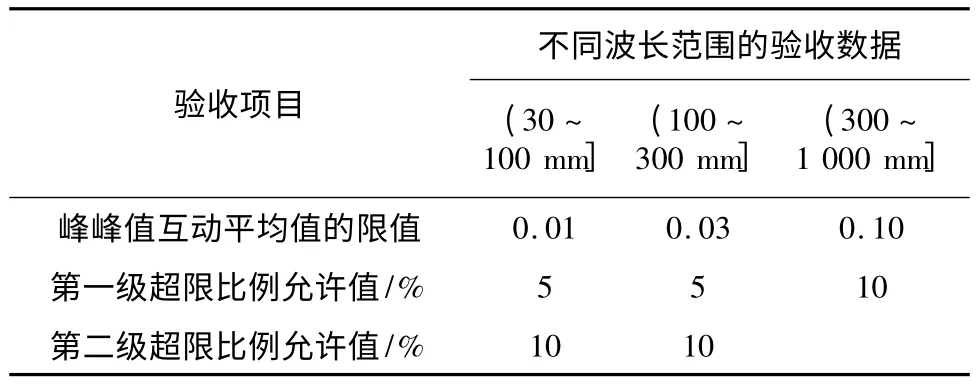
表1 欧洲纵向平顺验收数据
3 结语
钢轨打磨车用波磨轨廓检测装置研制的完成,准确地提供了打磨、铣磨和检验数据,为轨道养护提供了必要的理论支持,而且也大大提高了轨道检测和维护的效率。检测装置安装于打磨车上,改变了以前检测轨道车和打磨(铣磨)车分离的状态,使检测轨道和打磨(铣磨)轨道基本上实现了同步,节省了时间。
[1]赵国堂编.轨检车技术现状与发展[M].北京:中国铁道出版社,2001.
[2]陈东生,田新宇.中国高速铁路轨道检测技术发展[J].铁道建筑,2008,12(4):82.
[3]王磊,陶梅.精通 LABVIEW8.0.[M].北京:电子工业出版社,2007.
