基于显微视觉的光纤阵列精密测量研究
2014-06-25王润兰陈青山
王润兰,陈青山
(北京信息科技大学仪器科学与光电工程学院,北京100192)
1 引言
光纤阵列是光纤通信系统中光学器件与光纤之间连接应用最广泛的器件,主要应用在平面光波导器件、LD/PD阵列光纤器件、AWG(Arrayed Waveguide Grating阵列波导光栅)光通信网、DWDM(Dense Wavelength Division Multiplexing密集波分复用)以及多通道微光学模块中[1]。由于具有柔性传像、使用空间自由度大、易实现细长结构、重量轻等特点,广泛应用在医学、工业、科研、军事等众多领域当中[2]。因此,为了能够实现光纤阵列与光学元件的精确连接,最大限度的减少耦合损耗,提高耦合过程中的对准精度,纤芯分布的均匀性得到了人们的广泛重视。在实际使用中,通道数为4,8,12,24的光纤阵列的纤芯间距规格公差要求小于等于0.7 μm,通道数32及以上的纤芯间距规格公差要求小于等于1μm。高品质光纤阵列二者之间的距离误差一般控制在0.5μm以内。一个纤芯间距分布不均匀的光纤阵列几乎是不可能实现低功耗的耦合,所以光纤阵列纤芯间距的测量在实际应用中占有很重要的地位。
光纤阵列普遍采用将光纤放在V形槽内进行等间距排列,有125μm,127μm,250μm三种类型的纤芯距。由于制造和装配误差,会导致光纤放在V形槽内排列不是严格的等间距,因此在量产时的品质检测中,纤芯间距是最重要的检测项目[3]。目前,国外市场上主要的光纤阵列纤芯距测量系统制造商有两家:(1)日本的SURUGA SEIK公司在2000年推出的非接触、高精度的自动化光纤纤芯距测量系统(CORE-PITCH PRO.),该设备的测量精度0.02μm,是目前国内外市场上精度最高的光纤阵列纤芯距测量系统[4]。(2)美国Moritex USA Inc公司的FZ-1000XD-S非接触光纤阵列纤芯距自动测量系统,该系统在100×的放大倍数下,图像分辨率为0.07 μm,纤芯距的标准偏差为0.05μm[5]。在国内,深圳职业技术学院机电学院廖强华等人使用像素级的图像处理技术获得了光纤阵列纤芯的间距,其测量精度为0.1μm[6]。哈尔滨工业大学机械人研究所的陈立国等人利用计算机显微视觉技术和高精度纳米微驱动搭建的定位平台实现了纤芯距的检测,其纤芯间距的检测精度为50 nm[7]。台湾ITRI公司S.W.Hsu等人利用标有刻度的玻璃基片作为测距的参照模板[8]。该系统在光纤阵列定位、图像采集处理以及震动隔离上与原有技术类似,其测量的标准差在0.3μm以内,已应用于许多商用光纤阵列纤芯距的测量。然而国外的高精度测量是建立在复杂的设备装配上,成本高。国内无论是在测量精度还是测量速度上均待进一步改进。因此,寻求简单经济高精度的测量方法是目前主要研究目标。
本文探讨了在不用复杂的高精度宏微双驱动亚微米定位平台的情况下,利用亚像素级的图像处理技术对光纤阵列的纤芯间距进行精密检测,该测量方法可实现快速、准确的测量,可以达到高精度、低成本、高稳定性的优势,为研制非接触、高精度的自动化光纤阵列间距测量设备奠定了基础。
2 测量原理
图1为光纤阵列检测系统的测量原理图。该检测系统主要由光学实验平台、显微视觉模块、手动调焦模块以及图像处理软件模块组成。其中,显微视觉模块由CCD摄像头、图像采集卡、显微镜、物镜、光纤光源、光纤阵列夹具组成;软件模块是计算机上的MATLAB图像处理软件。该系统的CCD型号是高分辨率数字摄像机MVC3000,最大幅面为2048×1536,像元尺寸为3.2 μm ×3.2 μm。为了满足在一幅图像里能够采集到两根光纤的光斑,需要选用40×的物镜放大。经过亚像素插值算法,可将纤芯位置定位到0.2个像素。由此可知,测量系统的分辨率为3.2 μm ×0.2/40=16 nm。
测量系统的工作原理如下:置于光纤阵列一端的光纤光源经过准直透镜后进入光纤传导,通过调节三维移动台使高亮的光纤阵列被测端出射光通过滤光孔后,经显微物镜放大并成像于CCD面阵上,然后图像采集卡把采集到的图像信息传入计算机,经过图像处理软件分析处理计算出两根纤芯之间的距离[9]。
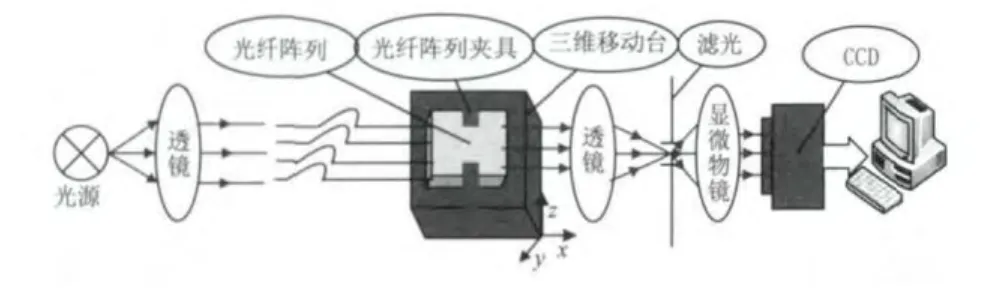
图1 检测系统测量原理图
3 纤芯距计算过程
为了提高检测系统的精度,通过改变软件算法比改变系统硬件简单而且有效[10],因此对获取的光纤图像进行处理是实现光纤阵列纤芯间距精密测量的核心部分。由于采集的图像边缘简单且对比度高,利于对图像进行边缘检测,进而提取图像特征参数。传统的像素级边缘提取方法精度有限,易受参数(灰度阈值、梯度阈值等)影响,本文利用一种亚像素级的边缘细分算法。鉴于插值法计算量小、精度高的特点,我们选用二次多项式插值法实现亚像素级的边缘提取。实验证明,该算法比传统的边缘提取方法有较好的定位精度和较好的鲁棒性。图像分析处理的流程图如图2所示。

图2 纤芯距计算程序流程图
首先读取采集的图像进行平滑滤波预处理;为了减少参与运算的像素点个数,提高后续处理速度,要提取感兴趣区域(ROI),即定位光纤的成像区域;然后利用二项式插值算法对该区域进行亚像素级的边缘提取并利用最小二乘拟合法圆心定位;最后根据CCD的像元尺寸及所选用的物镜放大倍数计算出纤芯的实际距离。获取的光纤图像如图3所示。图中的红色虚线框是提取的两个ROI区域,实红线是要计算的纤芯距。

图3 获取的光纤图像
在插值前需要粗提取图像边缘,常用的边缘检测算法有 Canny,Prewitt,Roberts,Laplacian 算子等,可将检测图像精确到像素级的边界。其中最经典的算法是Sobel算子,该算子计算量小、速度快,得到诸多领域的广泛应用。通过对Sobel算子引入一个衰减因子,可以避免丢失边缘图中梯度幅值较小的边缘,从而得到不失真的灰阶边缘图,而且也消除了数据溢出的可能。为了更准确的描述图像边缘点,减少噪声对检测结果的影响,提高算子的抗噪能力,在水平和垂直模板基础上新增45°和135°的两个模板。边缘梯度幅值选用最高输出模板所对应的边缘梯度值。
具体计算公式如下:

式中,A,B,C,D 分别为 0°,90°,45°,135°的梯度值,衰减因子scale=4,也称归一化因子。angle(i,j)为某一像素的的梯度方向角,R(i,j)为梯度幅值。
亚像素边缘提取具体步骤如下:运用扩展的Sobel算子对灰度图像处理得到不失真的灰阶边缘图,然后对灰阶边缘图再作带衰减因子的Sobel处理得到边缘的边缘图,可看到原边缘的两侧得到新的边缘,中间部分却变成背景,且宽度小于原边缘。利用此特点将灰阶边缘图减去边缘的边缘图,再将与负值部分对应的边缘点的值改为零,从而可得到接近单像素的细化边缘图,最后用已知边缘点的梯度方向近似代替未知亚像素点的梯度方向,并在该方向上进行多项式插值得到最终的亚像素边缘图[11]。处理步骤如图4所示。

图4 图像边缘提取处理步骤
边缘点P0(i,j)的亚像素坐标的插值公式如下:

式中,R0为P0点的梯度幅值;R-1和R1分别是在梯度方向上与P0点相邻的两像素点P-1和P1点的梯度幅值;L为相邻像素点到边缘点距离。式(4)成立的前提条件为R0>R-1且R0>R1。方向模板与P-1和P1点坐标对应表如表1所示。

表1 方向模板与P-1和P1点坐标对应表
最后运用最小二乘拟合法定位光纤光斑的中心,并计算两个中心之间的距离,即纤芯距。纤心的定位效果图如图5所示。
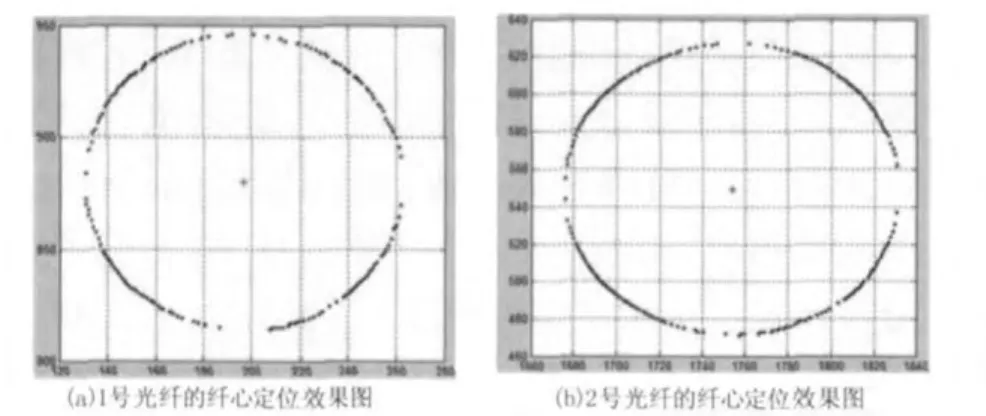
图5 纤心定位效果图(横轴为像素点的横坐标,纵轴为像素点的纵坐标)
4 数据分析
4.1 亚像素边缘定位精度
以上述得到的细化单像素边缘图的像素坐标值为标准坐标值,将定位后的单点与对应点的坐标差作为插值算法的偏差,计算得到1号光纤插值前后的X轴标准偏差为0.1489 pixel,Y轴标准偏差为0.1853 pixel,2号光纤插值前后的X轴标准偏差为0.1493pixel,Y 轴标准偏差为 0.1847pixel。则可以得到该算法的定位精度约为0.2 pixel。图6(a)和图6(b)分别为1号光纤、2号光纤插值前后每个像素点的坐标偏差。

图6 插值前后的坐标偏差
4.2 纤芯间距的定位精度及影响因素
由于真实的光纤阵列纤芯间距未知,因此无法将本文的测量值与真实值进行对比来评价系统的测量精确度。在等精度测量条件下,通过对同一对光纤在图像的不同位置的测量值进行分析比较。下面表2的四组数据分别进行了11,12,12,15次测量计算所得的纤芯距的均值与标准偏差,依次是两根光纤的光斑在图像的下半部、上半部、左半部以及整幅图像位置缓慢移动所测得的纤芯距,由表2中四组数据的标准偏差可得到纤芯间距的重复测量标准差在10~20 nm之间。

表2 四组纤芯距数据结果
然而光纤阵列的端面与物镜光轴不可能完全垂直,在移动过程中光纤端面的法线与物镜光轴夹角不断在改变。另外,光纤端面出射光具有一定的发散角,并且在不同的发散方向光强不相等。因此,光纤在移动测距过程中,虽然其端面的发光不变,但由于最终进入CCD摄相机的光通量不同会造成CCD上所成像光斑亮度的改变。且移动过程中需要调节光纤端面到物镜之间的距离,即物距,成像光斑形状大小也会发生变动。这些因素都降低了图像的成像质量,从而很大程度的影响了光纤阵列纤芯距的最终测量值。表3中两组数据均是两根光纤光斑在移动过程中并未注意调节光斑形状大小以及物距所测得的纤芯距,分别进行了12次和11次测量计算所得的纤芯距均值与标准偏差,由表3可以看出,其标准差明显偏大,均大于20 nm,小于25 nm。

表3 两组纤芯距数据结果
4.3 测量时间分析
本文在对图像像素处理之前首先对光纤的成像区域进行定位,减少了参与运算的像素点个数,因此大大减少了系统的测量时间。而且开始就用改进的Sobel算子对图像进行了边缘粗定位,而后仅仅是对Sobel提取的边缘点运算。这两点均为后续的处理速度作了很大的贡献。经实验验证,测量一次的运行时间 1.512s。
5 结论
研究了基于显微视觉的光纤阵列端面上纤芯距的精密测量方法,在稳定的光照与实验环境下,通过调节三维移动台选取两根相邻光纤的光斑,调节光纤阵列端面到显微物镜之间距离,直至光斑形状大小合适,对图像进行采集,然后运用定位精度大约0.2 pixel的亚像素边缘提取算法与最小二乘拟合法实现光纤纤心的精确定位,最后计算出光纤阵列的纤芯距。数据分析可得,该系统测量分辨率为16 nm,重复测量标准差23 nm。测量速度也有很大的改进,测量一对纤芯的时间为1.512 s。所给出的光纤阵列纤芯距测量方法不需要复杂的高精度纳米级微驱动定位平台,主要运用计算机显微视觉图像处理技术实现对光纤阵列纤芯距的精密测量。为今后研制非接触、高精度的自动化光纤阵列间距测量设备奠定了基础。
[1] G Nakagawa,K Miura,M Makiuchi,M YanoHighly.Efficient coupling between LD array and optical fiber array using Si microlens array[J].IEEE Photonics Technology Letters,1993,5(09):1056 -1058.
[2] Chi Zeying,Chen Wenjian,Li Wusen,et al.Military application research of passive optical fiber transmission technology[C].The Twelfth Nationwide Fiber - Optic Communication&the Thirteenth Conference Integrated Optics,2005:854 -859.(in Chinese)迟泽英,陈文建,李武森,等.无源光纤传像技术军事应用研究[C].全国第十二次光纤通信暨第十三届集成光学学术会议,2005:854-859.
[3] Liang Jingqiu,Hou Fengjie.One - dimension optical fiber array with silicon V - grooves[J].Optics and Precision Engineering,2007,15(1):90 -94.(in Chinese)梁静秋,侯凤杰.采用硅V型槽的一维光纤阵列的研制[J].光学 精密工程,2007,15(1):90 -94.
[4] Non - contact measurement instrument for optical core pitch[EB/OL].(2000 - 04)http://www.spectracore.com/archives/optcore.pdf.
[5] Measurement systems for optical devices[EB/OL].http://www.directindustry.com/prod/moritex/non - contact- eccentricity-measurement-devices-29083-821529,html.
[6] Liao Qianghua,Zhong Jiangsheng.Development of Auto -measuring system for fiber array[J].Laser & Infrared,2006,36(4):285 -287.(in Chinese)廖强华,钟江生.光纤阵列自动测量系统的研制[J].激光与红外,2006,36(4):285 -287.
[7] Chen Liguo,Zhu Jifeng,Wang Mingyue.Detection system for distances between the fiber centers in fiber array[J].Infrared and Laser Engineering,2011,40(4):729 -732.(in Chinese)陈立国,朱吉锋,王明月.光纤阵列中纤芯间距的检测系统[J].红外与激光工程,2011,40(4):729 -732.
[8] S W Hsu,Y D Jiaan,M S Huang.Measurement of core position of fiber array by a calibrated mask method[J].Key Engineering Materials,2005,295 -296:227 -232.
[9] Liao Qianghua,Zhong Jiangsheng.Measurement of fiber array errors based on image processing[J].Computer Engineering,2006,32(10):263 -267.(in Chinese)廖强华,钟江生.基于图像处理的光纤阵列误差测量[J].计算机工程,2006,32(10):263 -267.
[10] Liu Lishuang,Zhangyao,Lu Huiqing,et al.A fast Sub2pixel edge detection method for images[J].Journal of Optoelectronics·Laser,2005,16(8):994 - 996.(in Chinese)刘力双,张铫,卢慧卿,等.图像的快速亚像素边缘检测方法[J].光电子·激光,2005,16(8):994 -996.
[11] Rang Xing,Lei Zhiyong.R.esearch on edge detection algorithm of micro parts based on the vision image[J].E-lectronic Design Engineering,2009,02(17):6 - 10.(in Chinese)让星,雷志勇.基于视觉图像的微小零件边缘检测算法研究[J].电子设计工程,2009,02(17):6 -10.
[12] Qianghua Liao,Dongmei Wang.Automatic measurement of fiber array based on image processing[J].IEEE,2010:1 -4.
[13] Johan H C van Zantvoort,Simon G L Plukker,Erwin C A Dekkers,et al.Lensed fiber- array assembly with individual fiber fine positioning in the submicrometer range[J].IEEE Selected Topics in Quantum Electronics,2006,12(05):931-939.
