一种GPS多径时延估计的改进粒子滤波算法
2014-06-13张婷菲王星然
张婷菲,赵 昀,王星然
(北京航空航天大学电子信息工程学院,北京100191)
0 引言
影响卫星导航定位精度的误差源有许多,但随着全球卫星导航系统(GNSS)的增强以及现代化程度的提高,许多误差源的影响正在减少,多径效应产生的误差已经成为最重要的误差源。
多径是指卫星发射的信号通过非视线(Line of Sight,LOS)路径到达接收机的现象。由此,接收机接收的信号是直达信号和多径信号的叠加,导致产生额外的跟踪误差,进而影响到导航定位精度。尤其在城市环境建筑物比较密集形成众多反射面,多径效应更为严重。对多径效应的抑制程度直接影响到定位精度以及导航性能。为了消除多径影响,许多多径抑制技术不断地被开发出来,并在各类接收机中得到应用,如窄相关技术[1]、Strobe相关器技术和MEDLL技术等。
近十几年,基于蒙特卡罗方法[2,3]和递推贝叶斯估计[4]的粒子滤波(PF)算法[5]因其适用于非线性及非高斯噪声问题求解而受到关注。文章提出了一种改进的粒子滤波算法——基于遗传算法的粒子滤波GAPF。将遗传算法引入粒子滤波框架,用于估计多径时延,和标准粒子滤波算法相比,能有效增加粒子多样性,克服粒子退化问题。运用遗传算法的选择、交叉和变异算子改进粒子样本的多样性,防止样本空间在重采样后出现退化,从而提高多径时延的估计精度。此外,利用卡尔曼滤波对多径信号的幅值实现估计。
首先,介绍了GPS多径信号的模型,并针对采样信号处理带来的计算量大的问题,给出了信号向量压缩方法;其次,介绍了遗传算法,并给出了用遗传算法改进粒子滤波用于估计多径时延的步骤,以及结合卡尔曼滤波实现多径幅度的估计;最后,对提出的算法进行仿真验证。
1 GPS多径信号模型
设GPS接收机接收到的基带信号模型为:

式中,Nm为到达接收机信号路径的总数;c(t)为扩频码序列;ai(t)和τi(t)分别为第i路信号的复数幅度(包含相位)和时延;n(t)为信道噪声,n(t)~N(0,σ2)。将(m+kL)Ts(m=0,1,…,L-1)时刻的L个样本作为LTs时间段内的整体观测向量zk,同时假设ai(t)和τi(t)在这个时间段内保持不变,记为ai,k和 τi,k,则式(1)可离散化为:

式中,C(τk)= [c(τ1,k),c(τ2,k),…,c(τNm,k)],c(τi,k)为扩频码 c(t- τi,k)的样本向量。τk=[τ1,k,τ2,k,…,τNm,k]T和ak= [a1,k,a2,k,…,aNm,k]T分别为待估计的时延向量和复数幅度向量;而sk=C(τk)ak为信号假设。
2 观测向量压缩
在本方法中,似然函数的求解至关重要,它表示系统状态从τk-1转移到τk对应的信号假设和观测值zk的相似度,并由此决定各个粒子的权重。联合似然概率分布可写为[6]:

由于观测向量zk包含了大量的样本,直接使用式(3)来计算每个粒子的似然函数需要非常大的计算量,需要找到一个列数较少的正交压缩矩阵Qc,使得压缩后的观测向量是待估计多径信道的充分统计量,这样压缩后的信号测量模型变为:


式中,Ng为压缩后观测向量的维数,远小于式(3)中的L。
3 基于遗传算法的粒子滤波
3.1 遗传算法
达尔文的进化论认为,生物都是在逐渐地适应其生存环境来延续生命的。物种个体的基本特征会被后代所继承,但后代又不完全等同于父代。这些新的变化,若更能适应某一环境,则被保留下来,否则,将被淘汰。遗传算法[7,8]主要包括 3个遗传算子:选择算子、交叉算子和变异算子。运用遗传算法对得到的粒子空间进行重采样,用选择、交叉和变异3种遗传算子产生出新的一代更接近真实状态的粒子空间,从而可以保证粒子空间的多样性,避免粒子的退化现象。
3.1.1 编码
本文采用的二进制编码方法是遗传算法中最主要的一种编码方法,它使用的编码符号集是二值符号集0,{}1。二进制编码符号串的长度与问题所需的求解精度有关。本文取编码符号长度为14,对应的十进制变量能精确到小数点后4位。
3.1.2 选择算子
遗传算法使用选择算子来对群体中的个体进行优胜劣汰操作:根据每个个体的适应度值大小选择,适应度高的个体被遗传到下一代群体中的概率大;适应度低的个体被遗传到下一代群体中的概率较小。
本文中使用随机遍历抽样方法进行选择,算法说明如下:假设群体中有N个个体,FitV是一列向量,包含种群中个体适应度值(适应度用于衡量群体中各个个体在优化计算中能达到或接近或有助于找到最优解的优良程度)。通过获得适应度向量FitV的累加和完成随机遍历抽样的表格[SUM(FitV(1))…SUM(FitV(1∶i))…SUM(FitV(1∶N))],产生N个在[0,SUM(FitV)]内相等的空间编号。产生一个[0,1]之间均匀分布的随机数,通过比较产生的随机数与向量累加和来决定被选择的个体,比如,随机数小于表格中的第i个值,那么第i个个体就被选中,否则,再产生一个随机数,将它与表格中的第i+1个值进行比较,如此反复进行,直到选择N个个体进入交叉步骤。
3.1.3 交叉算子
遗传算法中利用交叉算子来产生新的个体。交叉,又称为重组,对个体进行两两随机配对,按较大的概率从群体中选择2个个体,交换2个个体的某个或某些位。交叉概率一般取0.4~0.99。本文取0.7作为交叉概率,使用单点交叉。
3.1.4 变异
变异是以较小的概率对个体编码串上的某个或某些位值进行改变,进而生成新个体,从而保持了粒子空间的多样性。
变异概率一般取0.000 1~0.1。本文使用基本位变异,变异概率取0.05。
3.1.5 适应度函数的选择
在遗传算法中,适应度函数的选择比较灵活,合理选择适应度函数有利于算法收敛到全局最优解,否则,有可能收敛到局部最优。本文将前述的似然概率作为适应度函数。
3.2 遗传算法改进粒子滤波
利用基于遗传算法的粒子滤波估计多径时延[9,10],如图 1 所示。
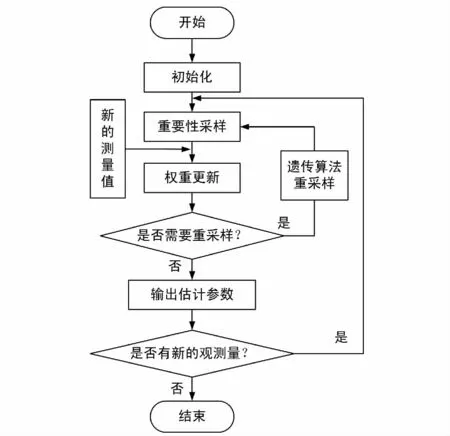
图1 遗传粒子滤波算法流程
主要步骤如下:
②预测。从k时刻的粒子权重集,利用状态方程预测k+1时刻的粒子集
④遗传算法重采样。k=k+1,跳到第②步。
3.3 卡尔曼滤波估计多径幅度
将改进粒子滤波用于解决非线性的多径时延估计,对于线性的多径信号幅度的估计,采用卡尔曼滤波算法[11]。
4 改进多径估计算法的仿真验证
仿真实验利用导航信号模拟器产生100 s的数字中频 GPS导航仿真信号。中频频率为1.405 MHz,采样率为11MHz,载噪比C/N0为50 dB-Hz,四比特量化。
针对可见星14,在模拟器中加入14号星的一路同相多径分量,多径与直达信号的幅度比为0.5,对于多径的时延,在0~1之间以均匀分布随机产生的100个随机数,单位为码片,每个时延值持续时间为1 s。随机产生的时延值随时间变化的趋势如图2所示。
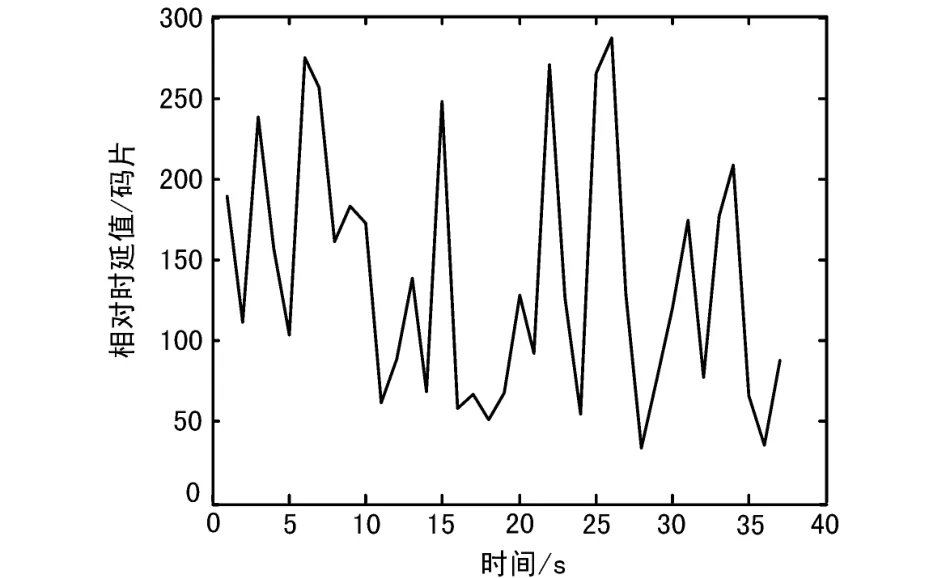
图2 14号星多径时延的变化
利用标准粒子滤波算法与遗传粒子滤波算法分别估计出多径的信道参数,并对它们的结果进行比较。这2种算法的时延估计结果与真实多径时延的比较如图3所示。这2种算法多径时延估计的均方误差比较如图4所示[12]。分别结合标准粒子滤波和遗传算法粒子滤波算法,利用卡尔曼滤波对信号幅度进行估计,得到多径信号与直达信号的幅度比值,并对这2种算法的仿真结果进行比较,多径信号幅度与直达信号幅度比值的估计结果分别如图5(a)和图5(b)所示。
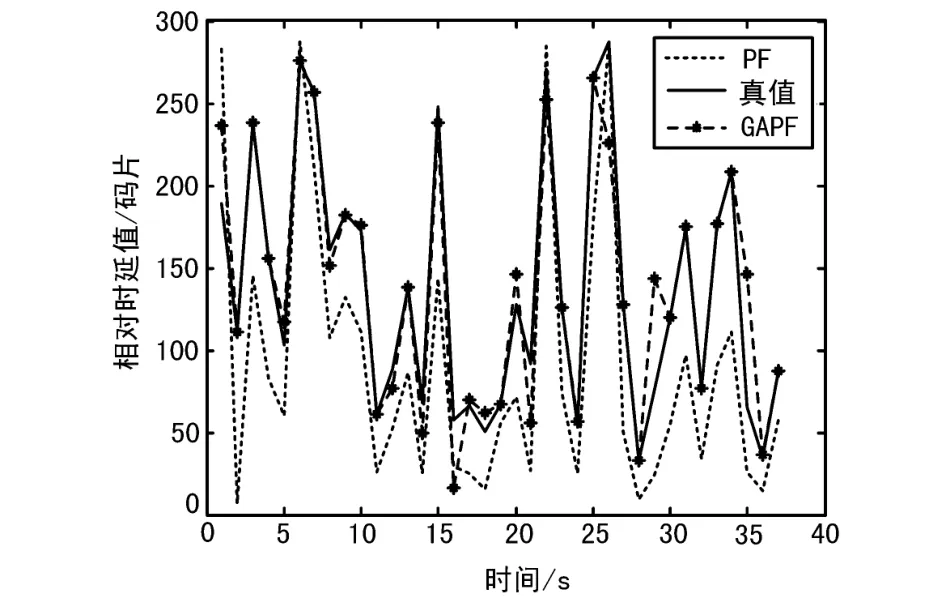
图3 PF与GAPF估计结果比较
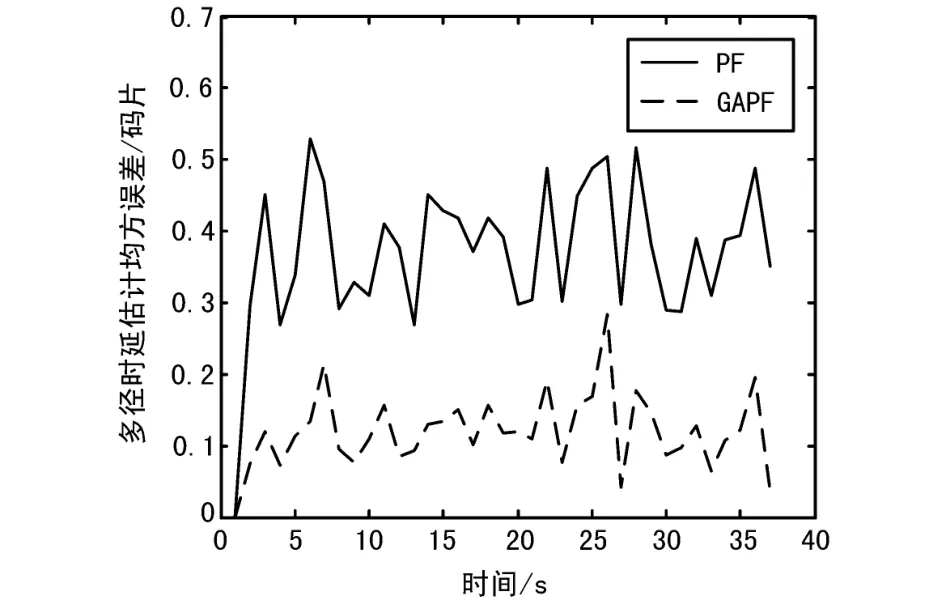
图4 PF与GAPF估计的均方根误差比较
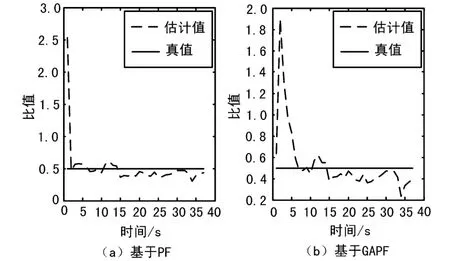
图5 信号幅度估计结果
从上述的比较可以看出,遗传粒子滤波算法的性能比标准的粒子滤波有较明显改善,对仿真结果进行统计得出,改进的算法将多径时延的估计精度提高了约130 ns(即0.13码片)。
5 结束语
研究了基于改进粒子滤波算法的多径估计方法。改进粒子滤波主要用来解决多径的时延估计,而多径信号的幅度,运用卡尔曼滤波来解决。针对标准的粒子滤波带来的粒子退化问题,将遗传算法用于粒子滤波的重采样步骤,改善标准粒子滤波的粒子退化和多样性下降现象。对上述多径估计算法进行了基于导航信号模拟器的测试。通过对标准粒子滤波和改进粒子滤波算法的仿真结果进行比较分析,结果显示本文提出的改进算法能够提高多径估计精度。
[1]周 非,黄顺吉.利用窄带相关进行多径信号抑制分析[C]∥中国西部青年通信学术会议论文集,2005:669-674.
[2]DOUCET A,DE FREITAS N,GORDON N.Sequential Monte Carlo Methods in Practice[M].Springer,New York,NY,USA,2001.
[3]LENTMAIER M,KRACH B,ROBERTSON P.Dynamic Multipath Estimation by Sequential Monte Carlo Methods[C]∥ Proceedings of ION GNSS 2007,Fort Worth,USA,2007:1 712 -1 721.
[4]LENTMAIER M,KRACH B,ROBERTSON P.Bayesian Time Delay Estimation of GNSS Signals in Dynamic Multipath Environments[M].International Journal of Navigation and Observation,2008.
[5]BERTOZZI T.Timing Error Detector Using Particle Filtering[C]∥Signal Processing and Its Applications,2003.Proceedings Seventh International Symposium on 2003:491-494.
[6]KRACH B,LENTMAIER M.Efficient Soft-output GNSS Signal Parameter Estimation Using Signal Compression Techniques[C]∥Proceedings of the 3rd ESA Workshop on Satellite Navigation User Equipment Technologies(NAVITECH'06),Noordwijk,the Netherlands,2006.
[7]周 明,孙树栋.遗传算法原理及其应用[M].北京:国防工业出版社,1999.
[8]SCHMITT LOTHAR M.遗传算法理论(二)[M].Theoretical Computer Science(310),2004:181 -231.
[9]林 恺,石江宏,邓振淼.基于遗传算法粒子滤波的多径跟踪[J].电子测量技术,2012,35(2):50 -54.
[10]李翠芸,姬红兵.新遗传粒子滤波的红外弱小目标跟踪与检测[J].西安电子科技大学学报(自然科学版),2009,36(4):620 -623.
[11]RISTIC B,ARULAMPALAM S,GORDON N.Beyond the Kalman Filter:Particle Filters for Tracking Applications[M].Artech House,Boston,Mass,USA,2004.
[12]SUH Y,KONISHI Y.Evaluation of Multipath Error and Signal Propagation in Complex 3D Urban Environments for GPS Multipath Identification[C]∥ ION GNSS 17th International Technical Meeting of the Satellite Division,2004.
