测量机器人无仪器高法测设高程
2014-04-18许辉熙朱坤奠
范 本,许辉熙,朱坤奠
(1. 四川建筑职业技术学院 测绘工程系,四川 德阳 618000;2. 成都云隆科技有限公司,四川 成都 610045)
测量机器人无仪器高法测设高程
范 本1,许辉熙1,朱坤奠2
(1. 四川建筑职业技术学院 测绘工程系,四川 德阳 618000;2. 成都云隆科技有限公司,四川 成都 610045)
全站仪无仪器高法测设高程需要测量人员反复照准、读数和计算。测量机器人的自动化和智能化特性,可以解决无仪器高法高程测设时繁杂的人为干预,实现具有一定自动化的高程测设。
测量机器人;无仪器高;高程测设;施工放样

对一些高低起伏较大的工程放样,如大型体育馆的网架、桥梁构件、厂房及机场屋架等,可以使用全站仪无仪器高法直接放样高程[1]。全站仪无仪器高法不需要量取仪器高,但在定待测设点的时候需要进行多次调整,数据计算和重复操作给测设带来很大不便。测量机器人可在一定范围内自动搜索棱镜,自动精确照准目标,通过一定的接口技术与电脑进行数据交换,实现内外业一体化操作。本文研究了测量机器人无仪器高法高程测设的自动化实现。
1 全站仪无仪器高法原理
如图1,欲测设建筑物上待测设点B的高程,在O点设置仪器,在已知水准点A和待测设点B上设置目标棱镜(两棱镜高相同,设为l),后视A点,测得斜距S1和垂直角α1;前视目标点B,测得斜距S2和垂直角α2(Δh1、Δh2为前后视棱镜距全站仪中心水平视线高差),则有 :

从而推出:

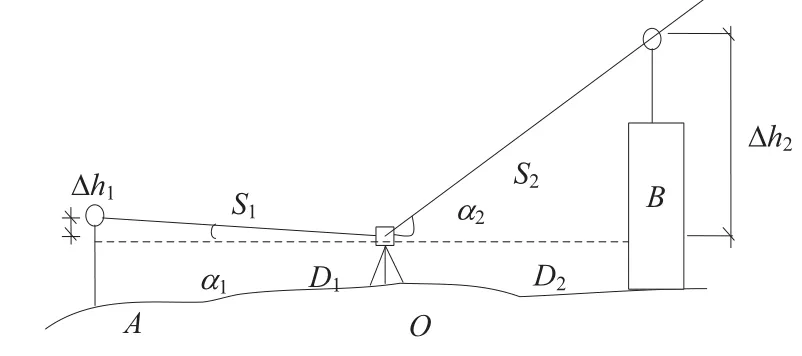
图1 全站仪无仪器高法原理
在实际测设中,测站点与目标点之间的水平距离一般都比较远,在使用式(1)计算HB时应该考虑地球曲率与大气折光的误差影响。设OA、OB水平距离分别为D1(D1=S1·cosα1)、D2(D2=S2·cosα2),则式(2)变为:
式中,K为大气垂直折光系数;R为地球曲率半径。得到HB之后,通过与设计高程进行对比,指挥并测设出B点高程。
2 测量机器人无仪器高测设高程流程
为减少计算工作量,使用笔记本电脑通过在线控制测量机器人实现实时测设。整体思路为:①计算机与测量机器人联机;②采集必要的测量数据,包括测站距目标点水平距离、垂直角;③根据软件提示进行放样;④下一点测设。测设软件结构图如图2。
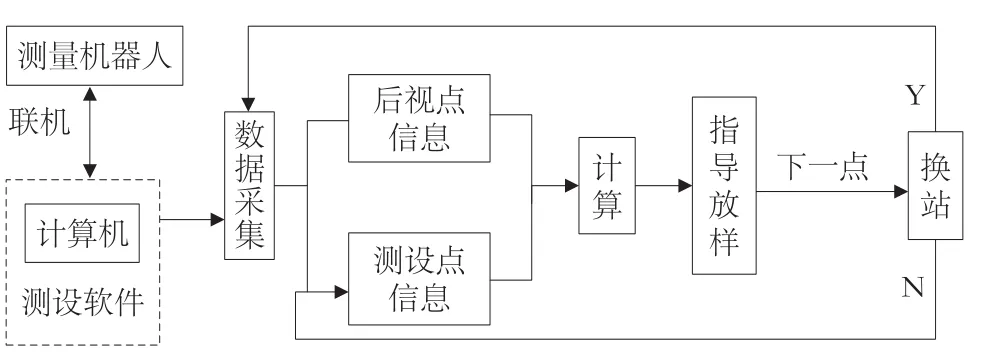
图2 结构图
3 测量机器人无仪器高测设高程实现
3.1 硬件系统
所使用的测量机器人为徕卡TS30。TS30测角精度为0.5",有棱镜测距精度为0.6 mm + 1×10-6,锁定模式测量时间<0.15 s[2]。无仪器高法测设高程精度主要受测垂直角和测距的影响,TS30在测角测距方面的精度优势可以保证高程测设的精度要求。
3.2 软件系统
软件采用VB编写,主要包含以下几大功能:
1)仪器联机。为确保成功调用GeoCOM中的函数语句,需要把对应的动态链接库和徕卡公司提供的功能模块添加到项目工程中[3]。函数的参数都可以在参考目录[4]中查找。①使用函数VB_COM_Init()初始化GeoCOM接口[5]。②使用函数VB_COM_ OpenConnection(Port, Baud, Retries),设置仪器与计算机间通信参数,打开通信端口。
2)点位信息采集[6,7]。在点位信息采集前要对仪器进行必要的设置,如棱镜模式、测距模式、大气改正等设置。用到的函数主要有:①仪器自动粗瞄时,使用搜索目标函数VB_AUT_Search2(Hz,V,bDummy),参数Hz和V分别代表仪器搜索水平角和天顶距范围(单位rad),bDummy为预留参数,一般设为False[7]。② 仪器粗瞄完成后,进行精确瞄准,使用函数VB_AUT_ FineAdjust3(DSrchHz,dSrchV,bDummy),参数DSrchHz、dSrchV应设置为比较小的数据,如0.03、0.05。③测角测距函数VB_BAP_MeasDistanceAngle(BAP_DEF_DIST, Hz,V,distance),各参数分别为水平角、天顶距和斜距。④放样过程中,为了减少连续的瞄准操作,把仪器的EDM测量模式设置成锁定(Lock)模式。此模式下,仪器会持续采集测量数据并把前视棱镜采集的数据返回给软件,软件通过实时计算实现实时指导放样功能。
3)指导放样。利用已知水准点高程和测得的前后视目标的垂直角和斜距,按式(3)计算待测点高程H′B,然后由待测点已知高程HB计算 ΔHB= HB-H′B,利用得到的数据按照软件提示指导放样。
4)换站/下一站。使用换站功能,会把前后视点信息采集的数据全部清空。因此,当搬站到下一测站,前后视信息需重新采集。若不需换站,使用下一点功能。这时,后视点信息采集的数据继续存在,前视点数据清空。在需测设的下一点安置棱镜,仪器大致瞄准进行前视点数据采集,按照指示进行高程测设即可。
4 精度分析
由式(3)不难看出,无仪器高法高程测设精度主要受测距和测角精度影响。对式(3)进行微分,转化为中误差公式:

由式(4)可见,测距误差对测设误差的影响,随着前后视相对垂直角及相对距离的增大而增大;测角误差对测设的影响随着相对垂直角的增大而增大;测距影响大于测角影响。假设前视点垂直角为60°,前视平距500 m,后视垂直角为30°,后视平距500 m,根据式(4)进行精度估算mH=3.07 mm。前面假设都是极限条件,实际中,在使用无仪器高法测设高程时,由相应规范,桥梁构件等高程测设允许偏差为±3 mm[8],因此使用此方法测设高程完全满足精度要求。
使用TS30测量机器人进行无仪器高高程测设,具有以下特点:①除架设仪器和前后视转方向外,测设过程中繁琐的数据计算和精确瞄准目标等完全不需要人为干预。②此研究支持带有ATR功能的徕卡其他型号测量机器人,如TCA2003、TPS1200系列、TM30等。③可以应用于厂房、桥梁、基坑等高差较大的工程领
[1] 张正禄,李广云,潘国荣,等.工程测量学[M].武汉:武汉大学出版社,2005
[2] 徕卡测量系统有限公司.徕卡TS30产品手册[Z].徕卡测量系统有限公司,2009
[3] 范百兴,李宗春,李广云,等.基于放样原理的特种罐内测法容量计量技术[J].测绘科学技术学报,2008,25(5):372-375
[4] Leica TPS1200+ Leica TS30/TM30 GeoCOM Reference Manual[Z]. Leica Geosystems AG,Heerbrugg Switzerland,2009
[5] 陈秀忠,钱林.地理数据通信接口技术在自动监测系统中的应用[J].测绘通报,2010(1):42-44
[6] 范本,刘星,青舟.测量机器人在线施工放样软件研究[J].测绘,2011,34(6):256-258
[7] 范本.基于测量机器人TM30技术地铁隧道建设自动变形监测研究[D].重庆:重庆大学,2012
[8] GB50026—2007.工程测量规范[S].
[9] 邬昱昆,王义修,葛妹.测量机器人变形监测自动化系统的研究[J].地理空间信息,2007,5(6):121-123
P258
B
1672-4623(2014)04-0042-02
10.11709/j.issn.1672-4623.2014.04.014
范本,硕士,主要从事工程测量及变形监测的教学与研究工作。
2013-09-29。
项目来源:国土资源部地学空间信息技术重点实验室开放基金资助项目(KLGSIT2013-10)。
