一种结合匹配区选择和障碍物探测的水下路径规划方法
2014-03-26李兰玉李开寒
李兰玉,熊 凌,李开寒
(武汉科技大学信息科学与工程学院,湖北 武汉,430081)
作为一种新型的水下无源导航技术,基于重力场的水下辅助导航方法正逐渐成为研究热点[1-4]。重力仪及重力梯度仪、重力场基准图和匹配算法是重力场辅助导航的三要素,因此相关研究内容主要集中在重力梯度仪建模分析[5-6]、重力场基准图的制备[7-8]和重力场组合辅助导航匹配算法等方面。其中,关于匹配算法的研究相对较多,一般思路是将地形辅助导航方法应用于重力场辅助导航中,如SITAN卡尔曼滤波算法、TERCOM匹配算法以及基于等值线迭代的ICCP 匹配算法等[9-11]。此外,也出现了与智能模式识别相关的匹配算法,如重力梯度多分量相融合的神经网络匹配算法[12]。
为了适应复杂的水下环境、提高重力梯度辅助导航系统的定位精度,往往需要有合适的匹配区。研究人员利用重力梯度熵、粗糙度、相关度、均值和方差等数学统计特征,通过大量仿真研究得出重力辅助导航匹配区域选择准则,在适配区内能达到较高的匹配概率[13-15]。
水下动态航路规划不仅需要考虑适配区的选择,还需进行实时目标探测和有效避障,才能保证潜器的导航安全。而目前航路规划研究主要侧重于算法方面的研究,如距离值传递法、基于栅格模型的双波传播算法、基于信息熵遗传算法路径规划等[16-19],以此来提高优化效率,加快规划速度。
综上所述,在水下潜艇重力场辅助导航领域,适配区选择和路径规划研究往往是独立进行的,即在进行适配区选择时只是基于重力梯度特征值,而没有考虑到实际避障问题,或者是只考虑避障问题而没有顾及适配区和非适配区的具体情况。而实际上,根据重力梯度正演理论,重力梯度特征越明显的地方,海底地形起伏越大,也就是说,适配区存在有暗礁的可能,同时,在规划的航路中还存在其他静止或移动的障碍,如他方潜器等。针对上述问题,本文提出一种结合适配区选择和目标探测的航路规划方法,即进行水下动态航路规划时,不仅考虑适配区的选择,还进行实时目标探测和有效避障,从而保障水下潜器的安全航行。
1 航路规划原理
基于适配区选择和目标探测的航路规划方法首先对潜艇要航行区域的重力梯度基准图进行特征提取,这里选取的特征有重力梯度方差和标准差、重力梯度能量和重力梯度熵;然后应用支持向量机根据这些特征进行分类,按参数阀值选择出适配区和非适配区。在适配区,应用A*算法进行实时避障从而动态规划出航路;在非适配区,实时目标探测和动态航路规划同时进行,从而避碰其他静止或运动的潜器。通过适配区的选择和实时目标探测相结合,实现潜艇在适配区和非适配区的动态避障和路径规划。图1为航路规划示意图,图中潜艇从适配区中A点出发,要航行至适配区的B点,图中黑色块部分表示适配区里的障碍物,非适配区内的航路上有其他潜器;实线代表预先规划好的航路,虚线部分表示结合适配区选择和目标探测的实时动态规划后的航路。
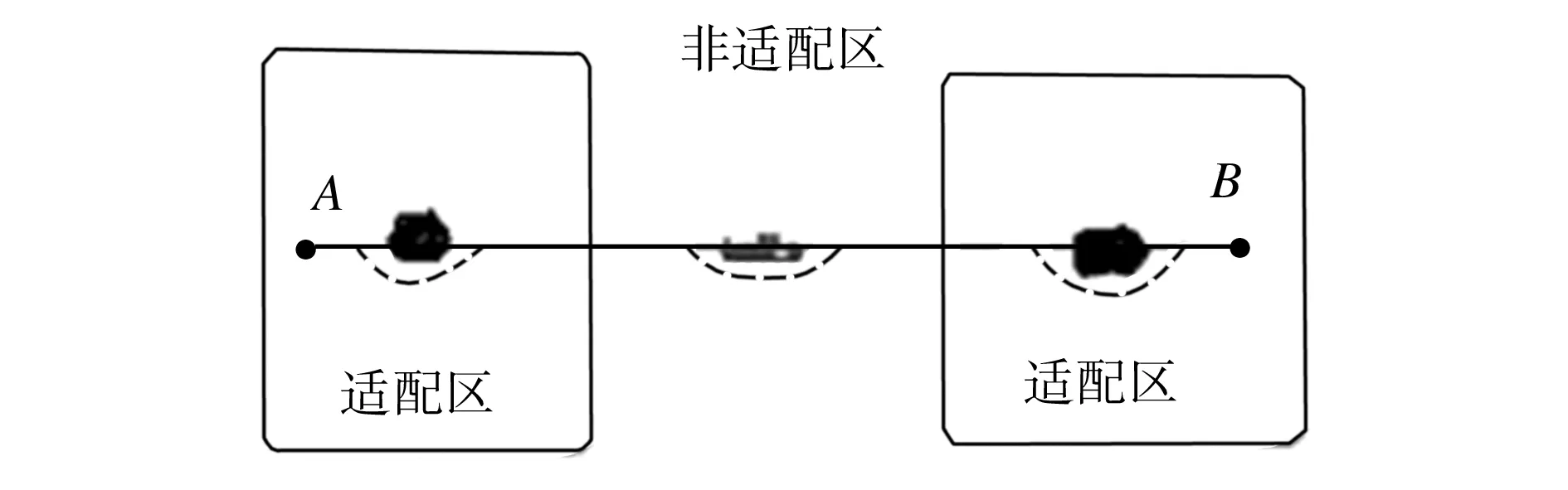
图1 潜艇航路规划示意图Fig.1 Schematic diagram of submarine path planning
2 基于支持向量机的适配区选择
2.1 重力梯度特征
用于适配区选择的重力梯度特征包括方差及标准差、重力梯度能量、重力梯度熵。
方差σ2及标准差σ是反映重力梯度数据分布离散程度的物理量,其计算公式如下:
(1)

重力梯度能量E反映重力梯度数据总量的大小,其计算公式如下 :
(2)
重力梯度熵H也反映了重力梯度数据分布的离散程度。重力梯度熵越大,重力梯度数据分布越均匀,反之则重力梯度数据分布离散程度越大。H的计算公式如下:
(3)
(4)
2.2 基于支持向量机的分类方法
在重力梯度特征空间中,利用基于支持向量机(SVM)的分类方法将选定海域分为适配区和非适配区。
设样本集(xi,yi),i=1,2,…,n,x∈Rd,y∈{1,-1}。建立L2范数非线性软间隔SVM优化问题的对偶形式:
(5)
s.t.αi≥0,i=1,2,…,n
若α*为式(5)的最优解,根据Kühn-Tucker条件[21]求解后得到的最优分类函数为
(6)
3 基于重力梯度反演的目标探测
基于重力梯度的水下目标探测技术实际上是将目标物体视为密度异常的质体,通过高精度的重力梯度仪测得因动态或静态异常质体引起的重力异常值Δg以及其导数的大小、变换规律等,进而推测目标的位置、形状、质量等参数。
如果探测目标的距离远大于目标尺寸,则全张量重力梯度值为
(7)

由式(7)进行推导,可得到探测目标质心的球坐标(θ,φ,R)为:
(8)
因为目标的质量是固定的,所以只需测量两次并结合载体的位置变化即可将R和m都求解出来,若进行多次测量还可以提高求解精度。
4 航路规划方法
适配区内有着明显的特征,可采用匹配策略进行导航,而非适配区内没有明显特征,因此采用跟踪的策略进行导航。考虑到适配区与非适配区的特点,航路规划在适配区内外分别进行,基于重力梯度反演进行目标探测,应用A*算法进行动态航路规划。
A*算法结合了启发式方法和形式化方法的特点[22]。它通过一个估价函数来估计图中的当前点到终点的距离(带权值),并由此决定它的搜索方向,当这条路径失败时,再尝试其它路径。
5 仿真及分析
本文采用的仿真软件为MATLAB。基于匹配区选择和目标探测的航路规划仿真分为3个步骤进行。
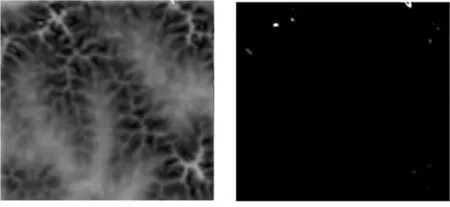
(1)重力梯度基准图特征提取和适配区选择。仿真基准图的尺寸为512×512,分辨率为50 m×50 m。通过对重力梯度基准图的特征提取,得到各种特征分量数据,如图2所示。对数据进行归一化处理后,应用SVM方法将基准图分为适配区和非适配区,如图3所示,图中曲线所围区域即为适配区。
在适配区内选取一块尺寸大小为5000 m×5000 m的区域,用均方差(MSD)算法进行匹配计算,对其适配性能进行验证,仿真结果如图4所示。仿真结果表明,在适配区内,忽略单点误差进行连续点匹配时,其匹配率能达到90%以上。
(a)局部均值 (b)局部标准差

(c)局部能量 (d)局部熵
图2重力梯度特征分量
Fig.2Featuresofthegravitygradient
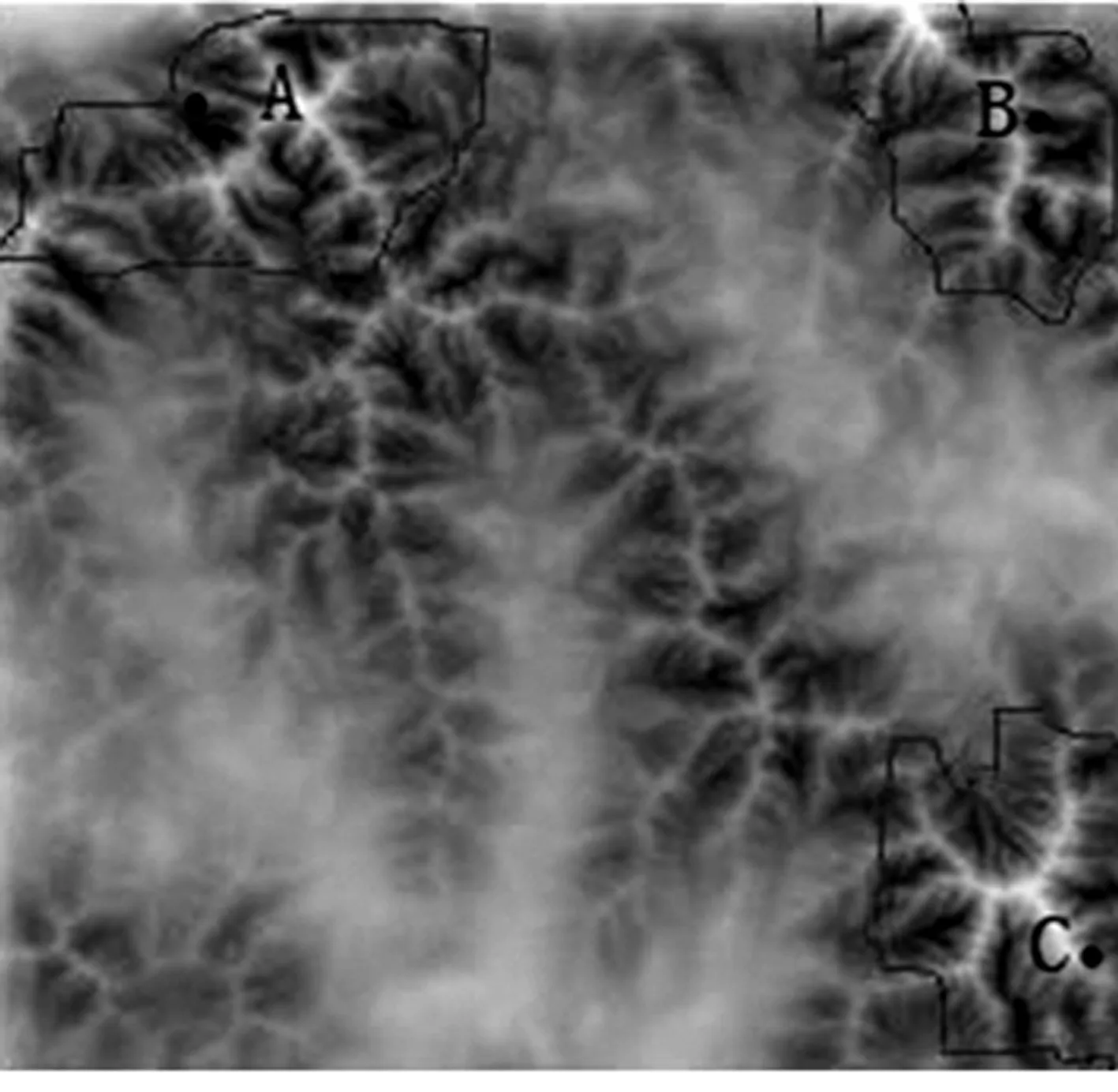
图3 适配区和非适配区Fig.3 Adaptive and non-adaptive areas
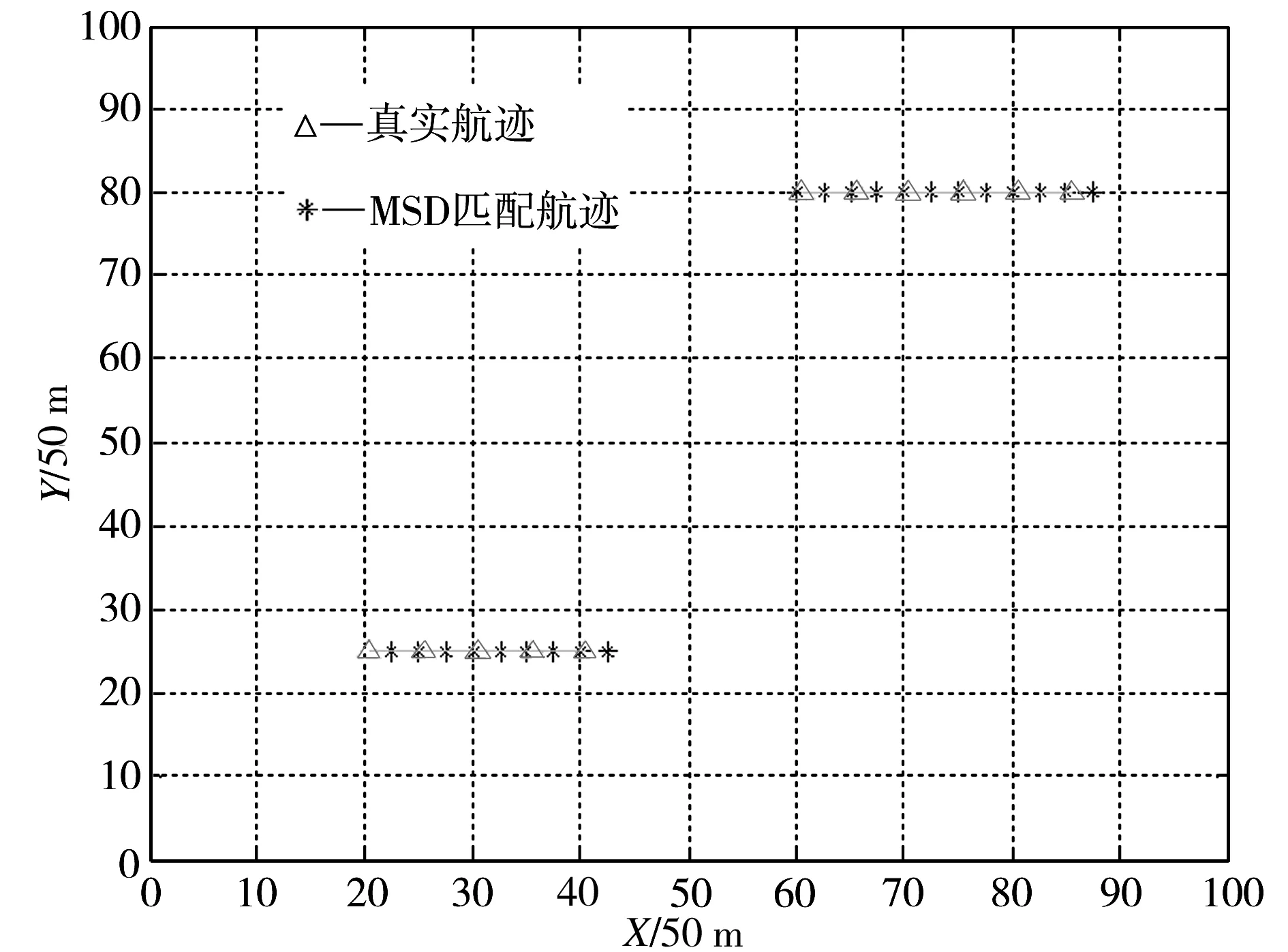
图4 适配区内的匹配效果Fig.4 Matching effect in adaptive area
(2)目标探测。假设重力梯度仪的精度为10-5E,障碍物是边长为100 m的立方体,其密度为2.7 t/m3,根据重力梯度反演方法得到障碍物的位置和质量,其与障碍物真实位置和质量的对比如表1所示。从表1中可以看出,当障碍物在潜器前方500 m范围内时,可以误差极小地反演出其位置和质量信息。
表1障碍物位置和质量的反演值与真实值对比
Table1Comparisonofinversionvaluesandtruevaluesoftheobstacle’spositionandmass
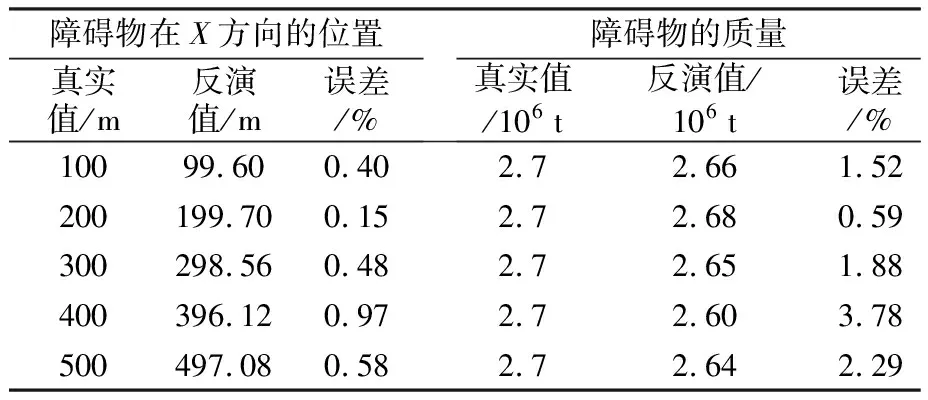
障碍物在X方向的位置真实值/m反演值/m误差/% 障碍物的质量真实值/106 t反演值/106 t误差/%10099.600.402.72.661.52200199.700.152.72.680.59300298.560.482.72.651.88400396.120.972.72.603.78500497.080.582.72.642.29
(3)动态航路规划。假设潜艇要从图3中适配区内的A点向东航行至另一个适配区内的B点。航路规划在适配区内外分别进行,仿真过程中利用重力梯度反演进行目标探测。
在匹配区内,障碍物区域为200 m×200 m,潜艇与障碍物安全距离为200 m,潜艇仿真行驶速度为50 m/步。航路规划仿真结果如图5所示。
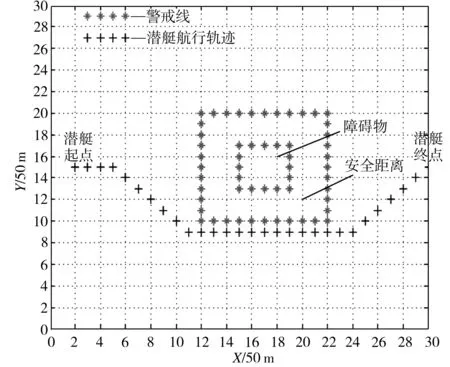
图5 适配区内的航路规划Fig.5 Path planning in adaptive area
在匹配区外,假设障碍物是静止的,动态规划航路如图6所示,潜艇航行速度为50 m/步。从图6中可以看出,当潜艇靠近目标且距离达到设定的阀值时,潜艇向上绕行过障碍。
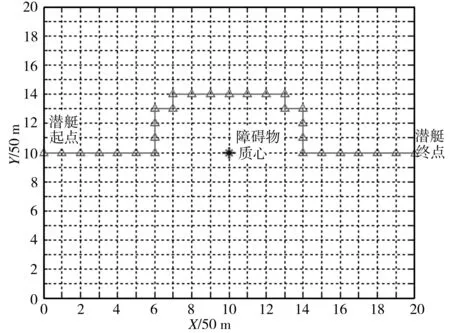
图6 适配区外存在固定障碍物时的航路规划
Fig.6Pathplanningwithfixedobstacleoutsideadaptivearea
在匹配区外,假设障碍物是运动的,且障碍物和潜艇以相同的速度同时从起点沿各自方向前进,其动态规划航路如图7所示。从图7中的航迹可以看出,潜艇与障碍物的距离达到设定阀值时,潜艇向上绕行一小段,当探测到两者之间的距离大于阀值时,潜艇迅速回归原航迹。
以上仿真结果表明,潜艇在水下航行时,能及时发现并绕开障碍物,同时又能高效快速地航行至目标区域。可见本文提出的水下路径规划方法是有效的,达到了预期目的。
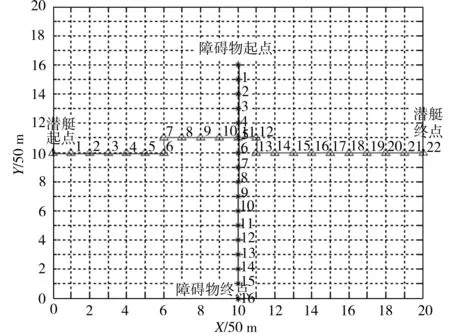
图7 适配区外存在移动障碍物时的航路规划
Fig.7Pathplanningwithmovingobstacleoutsideadaptivearea
6 结语
本文针对重力梯度辅助导航系统里的航路规划、导航与避障问题,综合考虑匹配区选择和目标探测,充分利用匹配区内的有效特征,同时利用基于重力梯度反演的目标探测进行适配区内和适配区外的动态航路规划,既保证了适配区内的匹配导航策略,又保证了适配区外的跟踪导航策略。通过仿真分析验证了文中提出的水下路径规划方法的有效性。
[1] Rice H, Mendelsohn L, Aarons R, et al. Next generation marine precision navigation system[C]//Position Location and Navigation Symposium, IEEE 2000. San Diego,CA,2000: 200-206.
[2] Xiong Ling, Ma Jie, Zhang Li, et al. Submarine navigation based on gravity gradient-terrain matching[C]//Proceedings of the Fifth SPIE International Symposium on Multi-spectral Image Processing and Pattern Recognition. Wuhan,China,2007,Vol.6790: 67904S.
[3] 吕良,刘敏,纪兵,等. 重力梯度仪在水下安全航行中的应用[J].海洋测绘,2010,30(4):23-25.
[4] 王虎彪,王勇,许大欣,等. 重力异常和重力梯度联合辅助导航算法及仿真[J].地球物理学进展,2011,26(1):116-122.
[5] 李海兵,蔡体菁. 全张量重力梯度仪测量方程及误差分析[J].东南大学学报:自然科学版,2010,40(3):518-604.
[6] 袁赣南,张红伟,朱岭. 重力梯度传感器数据的模拟及其辅助导航[J].传感器与微系统,2012,31(10):23-26.
[7] 武凛,马杰,周瑶,等. 重力场匹配导航的全张量重力梯度基准图模拟[J].系统仿真学报,2009,21(22):7037-7041.
[8] Ma Jie, Yang Fan, Yan Zu, et al. Density compensation to reference map of gravity navigation[C]//Proceedings of 2012 International Conference on Modelling, Identification and Control. Wuhan, China, 24-26 June, 2012:1129-1134.
[9] 王虎彪,王勇,许大欣.重力垂直梯度和重力异常辅助导航SITAN算法结果分析[J].机器人,2011,31(1):128-134.
[10]熊凌,马杰,田金文. 基于粒子滤波的重力梯度与地形信息融合辅助导航方法[J]. 计算机技术与软件,2010,27(2),85-87,110.
[11]吴宏悦. 基于地形熵和ICCP算法的水下辅助导航组合方法研究[J].舰船科学技术,2011,33(3):53-58.
[12]Xiong Ling, Xiao Linwei, Dan Binbin, et al. Full tensor gravity gradient aided navigation based on nearest matching neural network[C]∥Proceedings of Cross-Strait Quad-Regional Radio Science and Wireless Technology Conference(CSQRWC),2013.Chengdu,China,21-25 July,2013:472-475.
[13]程力,张雅杰,蔡体菁. 重力辅助导航匹配区域选择准则[J].中国惯性技术学报,2007,15(5):559-563.
[14]王虎彪,许大欣. 重力垂直梯度数据地图特征及其辅助导航[J].中国惯性技术学报,2010,18(1):93-96.
[15]吴华玲,徐效波,刘波.重力场可匹配区选择研究[J].测绘科学,2012,37(2):14-16,68.
[16]臧涛,笪良龙,杨廷武. 基于水下声场信息的三维航路规划研究[J].指挥控制与仿真,2008,30(6):37-40.
[17]储广风.双波算法在水下潜器路径规划中的应用[D]. 哈尔滨:哈尔滨工程大学,2011.
[18]罗翔,陈戈,陈希真,等. 基于遗传算法的自航水雷航路规划[J].火力与指挥控制,2009,34(3):99-101.
[19]李奎星.基于信息熵遗传算法的舰船导航路径规划技术研究[D]. 哈尔滨:哈尔滨工程大学,2009.
[20]张莉,周伟达,焦李成.核聚类算法[J].计算机学报,2002,25(6):587-590.
[21]Schölkopf B,Mika S,Burges C,et al. Input space versus feature space in kernel-based methods[J].IEEE Trans on Neural Networks,1999,10(5):1000-1017.
[22]Michalewicz Z,Fogel D B.如何求解问题:现代启发式方法[M].曹宏庆,译.北京:中国水利水电出版社,2003:81-84.
