基于图像处理中霍夫变换的定位器坡度检测
2014-03-23于博轩陈唐龙
于博轩 陈唐龙 于 龙 马 成 何 钊
(北京铁路局怀柔北机务段,101400,北京∥第一作者,助理工程师)
基于图像处理中霍夫变换的定位器坡度检测
于博轩 陈唐龙 于 龙 马 成 何 钊
(北京铁路局怀柔北机务段,101400,北京∥第一作者,助理工程师)
定位器坡度检测是接触网中一项重要的安全性检测项目。针对目前定位器坡度检测方法效率低下,精度不高的现状,通过接触网关键悬挂自动巡查系统捕捉图像,对采集到的接触网定位装置图像进行处理,将图像中的定位器、定位管等装置细化成直线。然后根据霍夫变换理论,在极坐标下返回该直线特征,进而计算出定位装置中定位器的坡度。试验证明该算法具有较高的准确度。
高速铁路接触网;定位器坡度;图像处理;霍夫变换
First-author'saddressBeijing Railway Bureau Huairou North Locomotive Depot,Hairon 101400,Beijing,China
定位装置是铁路供电支持结构中的主要组成部分,它是对接触线进行横向定位的装置。定位装置由定位管、定位器、支持器、定位线夹及其他连接部件组成。定位器是定位装置的主体,它是通过线夹把接触线固定到相应位置上。在曲线区段上,由于线路的外轨超高,机车受电弓随之向曲线内侧发生倾斜,为避免定位器碰撞受电弓,要求定位器具有一定的倾斜度,其倾斜度规定在1∶10到1∶5之间[1]。因为定位器承受着接触线拉出值引起的水平面内侧向力、定位器自身重量和部分接触线重量等多个力的综合作用,所以当定位器的安装不符合设计要求时,就会在定位点处形成硬点,使得受电弓通过时产生火花。通过调整定位器倾斜度,可使定位器的轴线方向与这些力的合力方向重合,消除定位点外的硬点[2]。因此,检测并根据需要调整定位器的坡度,保证其符合铁路技术标准,对安全行车具有重要的意义。
在实际测量中,通常采用水平测量尺或激光测量仪来测量定位器坡度,通过测量定位器上两点的高度差,再除以该两点的水平距离差来得到定位器坡度。但该方法检测效率低下,精度不高,难以满足目前我国高速铁路快速发展的要求。所以本文提出一种基于计算机图像处理自动检测定位器坡度的方法,经验证具有较高的准确度。
该方法的测量过程分为4步:①提取采集到的图像;②对图像进行处理,剔除干扰,使检测目标易于识别;③识别检测目标,提取被测对象特征;④计算定位器坡度,返回结果。
1 系统组成
本装置硬件结构由支吊柱定位装置抓拍相机组、接触线成像机组、补偿光源设备、支吊柱识别装置、嵌入式触发控制模块、高性能服务器、系统电源管理模块及显示与操作设备组成(见图1)。
车外部分由定位装置区域抓拍相机、补偿光源设备、支吊柱识别模块组成。如图2所示,当检测车路过支柱所在位置,支吊柱识别模块将线阵图像数据传输给高性能服务器,由服务器向触发控制模块发出触发命令,控制模块接到触发命令后发出相机触发信号,前后4台相机便同时对同一支柱进行正反两面对称抓拍。
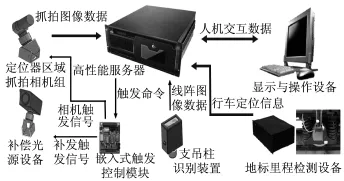
图1 系统硬件组成框图

图2 车顶硬件设施
车内部分由嵌入式触发控制模块、高性能服务器、系统电源管理模块等组成并封装于单一机柜中。地标里程检测设备速度传感器安装于车轴处,和车轴同步转动,每转一周输出200个脉冲,用一个计数器专门来计数,其计数值除以200,乘以车轮直径,再乘以π,即可得到车行走的距离。数据处理部分位于车内机柜中。
软件组成由支吊柱识别功能模块、实时成像采集处理模块、行车定位功能模块、成像信息融合与存储模块、专用巡线图像信息管理模块组成(见图3)。
2 图像处理
图4为一幅定点抓拍的腕臂图像,该腕臂所在支柱的杆号为310。
为了消除图4中接触线的干扰,先创建一个半径为5个像素的平坦的圆盘型结构元素se。

图4 杆号为310的腕臂图像
用该结构元素在整个图像区域平移,并检查哪里能完全匹配图像的前景部分,从而将图5中不能够完全匹配较细的接触线成功腐蚀。由于定位装置的图像较粗,若直接测量,会对定位器坡度的检测精度有较大影响。为了能够准确检测出定位管、定位器等直线,本文从直线的边缘逐层向中心细化,直到将二值物体和形状减小为单个像素宽的线为止[3]。腐蚀、细化后的腕臂图像如图5及图6所示。
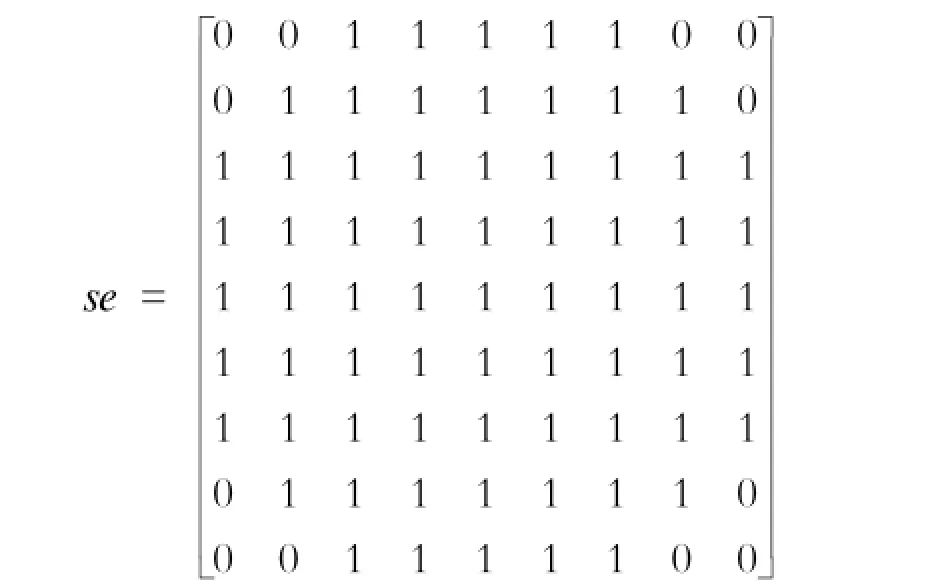

图5 腐蚀后的腕臂图像

图6 细化后的腕臂图像
3 基于霍夫变换的测量方法
霍夫变换的实质是对图像进行坐标变换,使变换结果更易于识别和检测[4]。
设直线

式中:
y——变量;
x——自变量;
k——直线斜率;
b——直线截距。
可以将该直线转换到k,b坐标系下,即:

将x,y坐标系中的一点(x0,y0),转换到k,b坐标系中,变成了斜率为-x0,截距为y0的一条直线:

所以,将x,y坐标系中一条直线上所有的点都转换到k,b坐标系中,会得到经过某一点的无数条直线,而这个交点的坐标值k和b就是原x,y坐标系下直线y=kx+b的斜率k和截距b。由此可知,通过坐标系的转换能够得到原直线的特征。
霍夫变换正是基于这种思想,将直线方程由直角坐标转换为极坐标形式,在极坐标中反映出原直线的特征。
将X-Y平面的图像变换到θ-ρ平面处理。直线方程为:

式中:
ρ——极坐标中原点到直线的距离;
θ——极坐标中直线相对于正向x轴的顺时针角度。
而直角坐标系里直线的角度信息为θ+90°。
通过直线方程可以看出,X-Y平面上的一点(x0,y0)在θ-ρ平面上是一条正弦曲线,X-Y平面上的一条直线在θ-ρ平面上是经过一点(θ0,ρ0)的无数条正弦曲线的集合,而该交点的值就是XY平面上直线的θ和ρ值,如图7及图8所示。
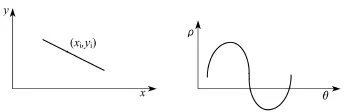
图7 点霍夫变换的极坐标形式

图8 直线霍夫变换的极坐标形式
由上式得出在X-Y平面上直线方程为:

得到极坐标下(θ0,ρ0)坐标值,便能求出原直线在直角坐标系里的斜率和截距。
霍夫变换直线检测是直接按照霍夫变换定义进行的,算法描述如下:
(1)对原始图像进行二值化,设0表示背景,1表示物体特征点。
(2)在参数空间ρ,θ里,建立一个累加数组H[ρ,θ],并置数组H中每个元素初值都为0;对二值图像中每个以1表示的点(x,y),让θ取遍θ轴上所有可能的值,并计算对应的ρ,再根据ρ和θ的值对数组进行累加(H[ρ,θ]=H[ρ,θ]+1)。
(3)对数组H[ρ,θ]进行局部峰值检测,得到被检测直线的参数ρ和θ[5]。
通过霍夫变换检测图6中的直线,效果如图9所示。霍夫变换图9中的4个矩形的点分别代表检测出的图6中的4条直线,而它们的坐标值则直接返回了该4条直线的特征。返回结果如表1所示。
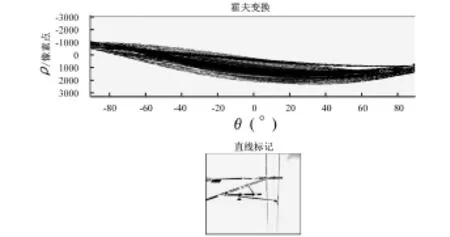
图9 杆号为310的腕臂图像霍夫变换效果图
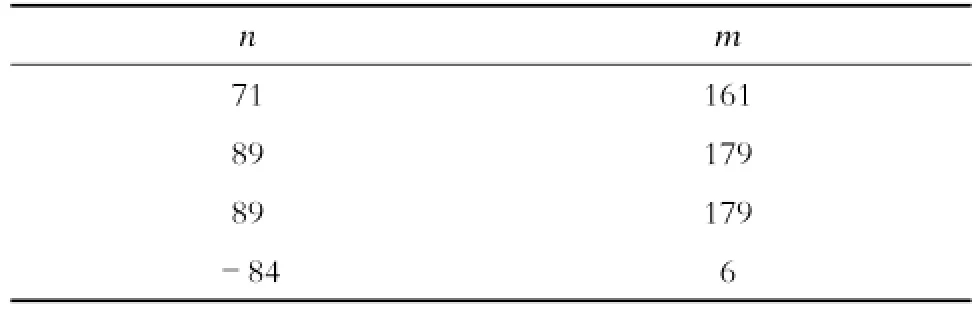
表1 杆号310腕臂图像定位器坡度检测结果(°)
该结果中n为图中矩形的横坐标值,m为图5中直线逆时针旋转与水平正方向的夹角,由此得出定位器与水平方向的夹角a=6°,定位器坡度值为tana=0.105 1。
为了检验此算法的准确性,试验采用电子量角器予以验证。从图10中可以清晰看到,电子量角器显示角度∂=174.01°,进而可知该定位器与水平的夹角约为6°,与返回的a值近乎相等。因此可以得出结论,上述方法具有较高的准确度。
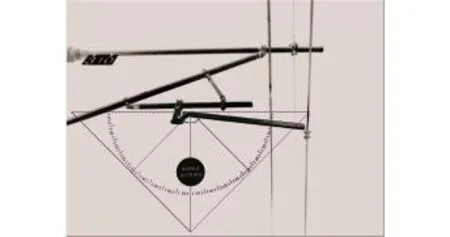
图10 电子量角器验证杆号310腕臂图像中定位器坡度
为了验证上述方法应用是否广泛,试验另选取一张较为复杂的图片进行试验。该图像中腕臂的支柱编号为341。腕臂图像如图11所示。由于此幅图像是从傍晚拍摄的一段视频流中截取的,所以检测目标与背景之间的颜色差异较图4相比没有那么明显,并且该定位器上还覆盖着一层积雪。

图11 杆号为341的腕臂图像
在之前的算法中,检测的角度是定位器所在直线沿逆时针旋转与定位管所在直线正方向的夹角,而这幅图像中定位方式为反定位,所以先将该图像进行矩阵左右反转。如图12所示。

图12 矩阵左右反转后的图像
由于背景对检测目标干扰较大,所以检测前先将背景滤除,然后再按前面介绍的算法进行检测,得到霍夫变换效果图和返回结果如图13和表2所示。
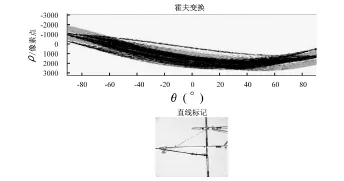
图13 杆号为341的腕臂图像霍夫变换效果图
从返回结果中看到该定位器坡度角约为6°,电子量角器验证结果如图14所示。
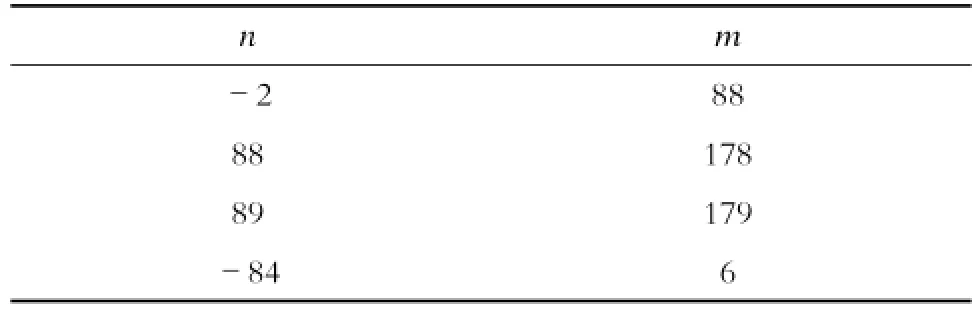
表2 杆号341腕臂图像定位器坡度检测结果(°)
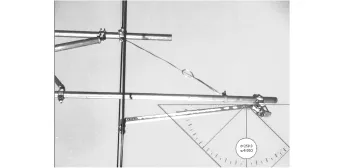
图14 电子量角器验证杆号341腕臂图像中定位器坡度
可见,电子量角器测量的定位器坡度角的结果也大约等于6°,与返回值相等,因此证明该方法在处理稍复杂图像时也具有一定的准确度。
4 校正
当取得一幅图片,其显示的定位器坡度角是人眼从水平观测的角度来看到的夹角。实际中的定位管安装在腕臂上,相机是以一定仰角去拍摄,这样,照片上显示的坡度角会比实际的小(如图15:定位器实际坡度角为c,相机拍摄照片显示坡度角为d)。

图15 水平与仰视看到的角度对比图
可以看出,仰角拍摄造成的影响不会使水平方向边的长度出现变化,只会使垂直方向边的长度变短,所以坡度的校正换算关系可以等价到垂直边长度的变化关系上来,如图16所示。
假设B是相机所在位置,O1O2为水平方向观测到的垂直长度,A1A2为垂直边的实际位置。设A1A2=O1O2=a,通过相机拍摄的图片显示出的长度MN=b。因为MN⊥AB,相机拍摄的仰角为θ,所以a和b之间的关系为:

由于水平方向长度不变,所以坡度值的大小与垂直方向长度成正比关系,因此,根据式(6)可知,实际坡度值与测量出的坡度值之间也存在着一个系数为1/cosθ的正比关系。
检测时,由于人工把相机的拍摄仰角定为45°,所以本文前面检测的杆号为310和341的两幅定位器图片,它们的实际坡度值应为:


图16 相机与拍摄目标位置关系示意图
该值满足于规定的(0.1,0.2)范围之内,所以该定位器情况正常。
5 结语
对从伊宁东站采集到的定位装置图片进行处理,采用了腐蚀、细化、去除背景及图形左右转置等方法,再通过霍夫变换对直线进行检测,得到直线的特征数据,最终返回坡度值。本方法能够缩小检测范围,使检测目标更为明确,并具有一定的准确度;同时,也大大减少了不必要的人力物力,提高了检测效率。但对于被检测图像中,背景含有房屋、树木,以及定位装置上存在垃圾等异物对于检测目标成像造成的影响,还需要继续深入研究。
[1] 于万聚.高速电气化铁路接触网[M].成都:西南交通大学出版社,2003.
[2] 段汝娇,赵伟.基于计算机视觉的接触网定位器倾斜度自动测量方法[J].中国铁道科学,2011.7(4):82.
[3] Rafael C.Gonzalez.数字图像处理[M].北京:电子工业出版社,2005.
[4] 叶富东.基于霍夫变换的图像检测算法[J].湖北生态工程职业技术学院学报,2011(3):9.
[5] 易玲.基于分级的快速霍夫变换检测[J].微计算机信息,2011,11(23):206.
Locator Slope Detection Based on Hough Transform in Image Processing
Yu Boxuan,Chen Tanglong,Yu Long,Ma Cheng,He Zhao
Locator slope is an important safety test itemfor the catenary.Due to the inefficiency and inaccuracy of the current catenary locator method for slope measuring,an automatic inspection system of catenary suspension is used to collect images,which are then processed to refine the locator into a straight line.Based on the Hough transform theory,in polar coordinates the features of straight lines will be retured,which helps to calculate the slope of catenary locator.The experimental result shows that this algorithm has high precision.
highspeed railway;catenary locator slope;image processing;Hough transform
U 225.4+2
2012-09-25)
