一种非接触单相机角度测量方法*
2014-03-22甘晓川孙安斌马骊群
甘晓川 孙安斌 叶 欣 马骊群
(中航工业北京长城计量测试技术研究所,北京 100095)
0 引言
视觉测量技术是建立在计算机视觉研究基础上的一门新的检测技术,其研究重点是物体的几何尺寸及物体在空间的位置、姿态等的测量[1]。视觉测量的分类方法有多种,其一是按所用视觉传感器数量可以分为单目视觉测量、双目视觉(立体视觉)测量和三(多)目视觉测量等[2]。其中,单相机位姿测量系统(以下简称单目系统)是指仅使用单台图像传感器采集图像,经过对图像的处理计算,实现对被测物的6个参数,即3个平移参数和3个旋转参数进行测量的系统。一般是由成像原件(多为CCD或CMOS)、光学镜头、滤光片、目标靶、测量软件等组成。单目系统由于具有非接触、结构简单、标定步骤少等优点而受到关注,多用于机器人自主导航、手眼系统、目标对接等任务中。目前,位置测量误差能达到0.2mm,角度误差能达到0.05°[3]。
在实际的测量任务中,可能不需要测量所有的参数或者仅对某个参数有测量精度要求。例如,仅关心被测物体相对于相机光轴的转动。本文针对这种需求,设计和实现了一种单目系统,用于测量被测工件沿相机光轴方向的转角,并利用多齿分度台对本系统的测量误差进行了验证。
1 测量系统组成与原理
1.1 测量任务分析
在本测量任务中,需要测量被测零件沿自身主轴方向的旋转角,如图1所示。测量时相机正对被测物,并且相机和被测物体没有相对运动。根据工件的使用要求相机的工作距离为600mm,被测物体直径约150mm,进过计算,选择镜头的焦距为16mm。根据相机校准和使用过程中需要达到一定的景深范围,选择了F4的光圈,此时景深大约为30mm。考虑到使用环境为实验室环境,具备常规的光照条件,所以采用被动照明方式。
1.2 系统组成
本系统使用的CCD相机型号为DH-SV1421GM,像素数量为1,392×1,040,像素尺寸为4.65μm×4.65μm。由于试验条件限制没有直接使用16mm镜头,而是使用了8mm定焦镜头Computar M0814-MP2和2倍扩倍镜Computar EX2C,组成等效焦距16mm的定焦镜头,对试验结果没有影响。在被测工件面对相机的端面上,安装有棋盘板。棋盘板与被测物固定在一起,可一同旋转,如图1所示。

图1 系统组成示意图
1.3 测量原理
目标物体位姿测量方法一般可分为两种[4]:一是利用标定得到的摄像机外部参数确定摄像机坐标系与物体坐标系的转换关系,当目标物体在空间坐标系中的位置发生改变时,物体在空间坐标系的坐标就相应地发生变化,物体位姿测量就是要求取目标物体在空间坐标系下的位姿信息;二是设目标物体在空间坐标系中的坐标相对固定,当目标物体发生移动时,可假设空间坐标系随目标物体一起移动,这样空间坐标系的坐标原点不是固定不变的,而物体在空间坐标系中的位姿是保持不变的,我们所要求取的是摄像机坐标系与随目标物体一起移动的空间坐标系之间的转换关系。
本文中我们采用的是第二种方法。
1.3.1成像模型和坐标系
关于相机的针孔成像模型和畸变模型,有很多文献可以参考,如文献[5-6],在此不再详述,为了便于描述,仅将常用的坐标系,物体坐标系、相机坐标系、像素坐标系在图2中表示出来。Oc为相机镜头光心,Xc轴与Yc轴分别与图像平面的x轴和y轴平行,Zc轴相机的光轴,它垂直于图像平面,与图像平面的交点,即为图像坐标系的原点Oxy。

图2 坐标系示意图
设物体上有一点Pw(xw,yw,zw),经过两次的坐标变换得到在相机坐标系下的坐标p(u,v)。采用针孔模型来描述成像的过程可分成两步,即两次坐标变换。第一次是从物体坐标系变换到相机坐标系。
(1)
其中,
R为3×3旋转矩阵,R-1=RT,detR=1(正交单位矩阵);T为3×1平移矩阵。第二次是从相机坐标系变换到像素坐标系。
(2)

p′=MR′P′
(3)
此处,P′可以理解为棋盘板上各个角点,其坐标为已知,p′为各角点对应的在图像上的坐标。M为相机内参数,可事先通过校准来确定其数值。R′为外参数,为待求。求解公式(3),就可以得到R′中的r1、r2,进而得到
(4)
1.3.2相机校准
相机校准所要解决的问题就是建立物体的世界坐标与摄像机内图像的像平面坐标的转换关系。在此实质上将摄像机标定问题转换为求两平面——摄像机成像平面和目标平面之间的透视投影矩阵。摄像机标定的作用就是一旦确立了这种关系,只要知道了摄像机内图像的像平面坐标,我们就可以知道物体的世界坐标了,知道物体的世界坐标也就知道它在摄像机内图像的像平面坐标了。
相机内参数校准方法有多种,其中使用标准板的方法,校准过程比较简易,能获得比较满意的结果,本文中的标准板使用了9×6的棋盘板图样来校准相机。详细的过程可参见文献[5-7]。图3为用于校准相机内参数的图像之一。

图3 校准相机的图像
1.3.3外参数的计算
在不进行调节的情况下,相机的内参数是不变的,这也是相机能进行测量的一个基础。每幅图像都有自己的外参数,它包含了被测物体坐标系与相机坐标系之间的旋转和平移关系。正是因为不同图像的外参数不同,也就是物体坐标系在相机坐标系中的位置的不同,使得我们才能利用外参数来计算两个坐标系之间的关系。计算外参数时需要使用事先已经通过相机校准得到的内参数,用于减小镜头畸变对测量结果的影响。
1.3.4旋转角度的计算
在实际测量中,相机的位置固定不动,被测物体绕自身轴线(与相机光轴大致平行)旋转一定角度,该角度即为被测量。对该旋转角度进行测量,实际上就是求解R矩阵。从R矩阵即可求解出物体坐标系分别绕x轴、y轴和z轴各自的旋转角度a、β和g。由
(5)
可得,
(6)
g即为所求的角度。
2 测量系统的软件
测量软件在VS2010开发环境下,利用C#语言调用了部分Emgu CV 2.4.2.1777的数据结构和函数,编写了测量软件。Emgu CV是Open CV的C#版本,对其中的数据结构和函数进行了封装。关于Open CV和Emgu CV的更多信息可参见文献[8-11]。测量软件具有的主要功能有:
1)识别图像中的棋盘板图像,获取角点在图像中的坐标;
2)利用棋盘板图像校准相机,获得相机的内参数;
3)计算所获得的内参数的重投影误差;
4)计算测量图像的外参数,并利用外参数解算得到g角。
3 测量过程
测量角度的过程并不复杂。步骤如下:
1)调整相机与被测物体之间的距离和角度,使得棋盘板几乎位于图像的中间部分,并且尽可能的正对被测件,还要尽可能覆盖较大的面积。这是为了保证a和β的角度符合测量要求,一般不超过5°即可;
2)用标准板对相机进行校准,获得相机的内参数。标准板要充分覆盖图像区域,标准板上的特征点数量要充分多;
3)分别对旋转前后的被测零件拍照,用事先得到的畸变参数对测量的图像进行矫正,减小畸变对测量结果的影响;
4)最后,分别计算两幅图像的外参数,进而计算两幅图像各自的g角,它们的差即为被测零件的旋转角度。
4 角度测量误差
测量任务要求能实现不超过3′的测角误差,选择型号为WDFT-360E,编号为30507的360齿的多齿分度台作为角度的标准器,见图4,用于验证系统的测角精度。

图4 多齿分度台和目标板的图像
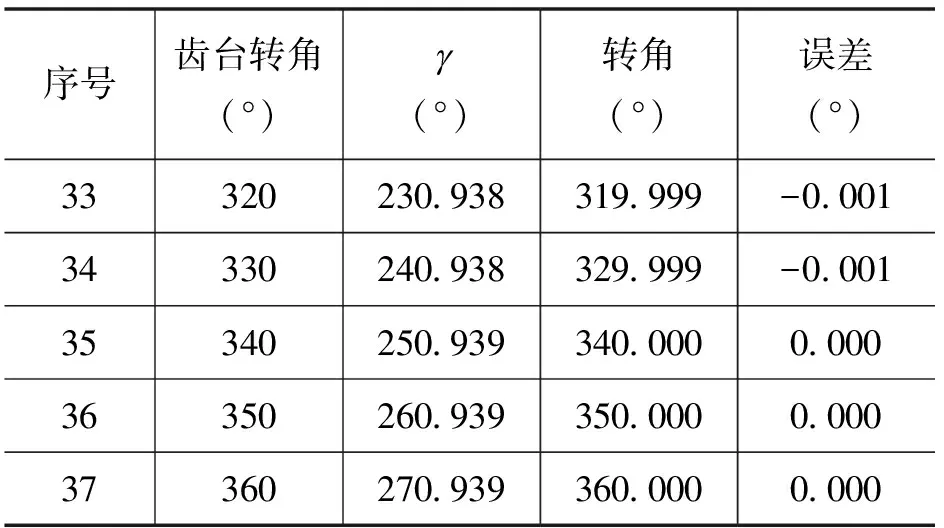
将相同的棋盘板图像固定在多齿分度台的表面上,从分度台的0°开始,以10°为步距,一直测量到360°,每个位置拍摄一幅图像,共测量37个位置。由于多齿分度台的最大分度间隔误差不超过2.0″,远小于系统要求的测角误差,此处将转台的转角不加修正值使用。分别计算每幅图像的g参数,角度测量误差曲线图见图5,角度误差测量结果见表1。
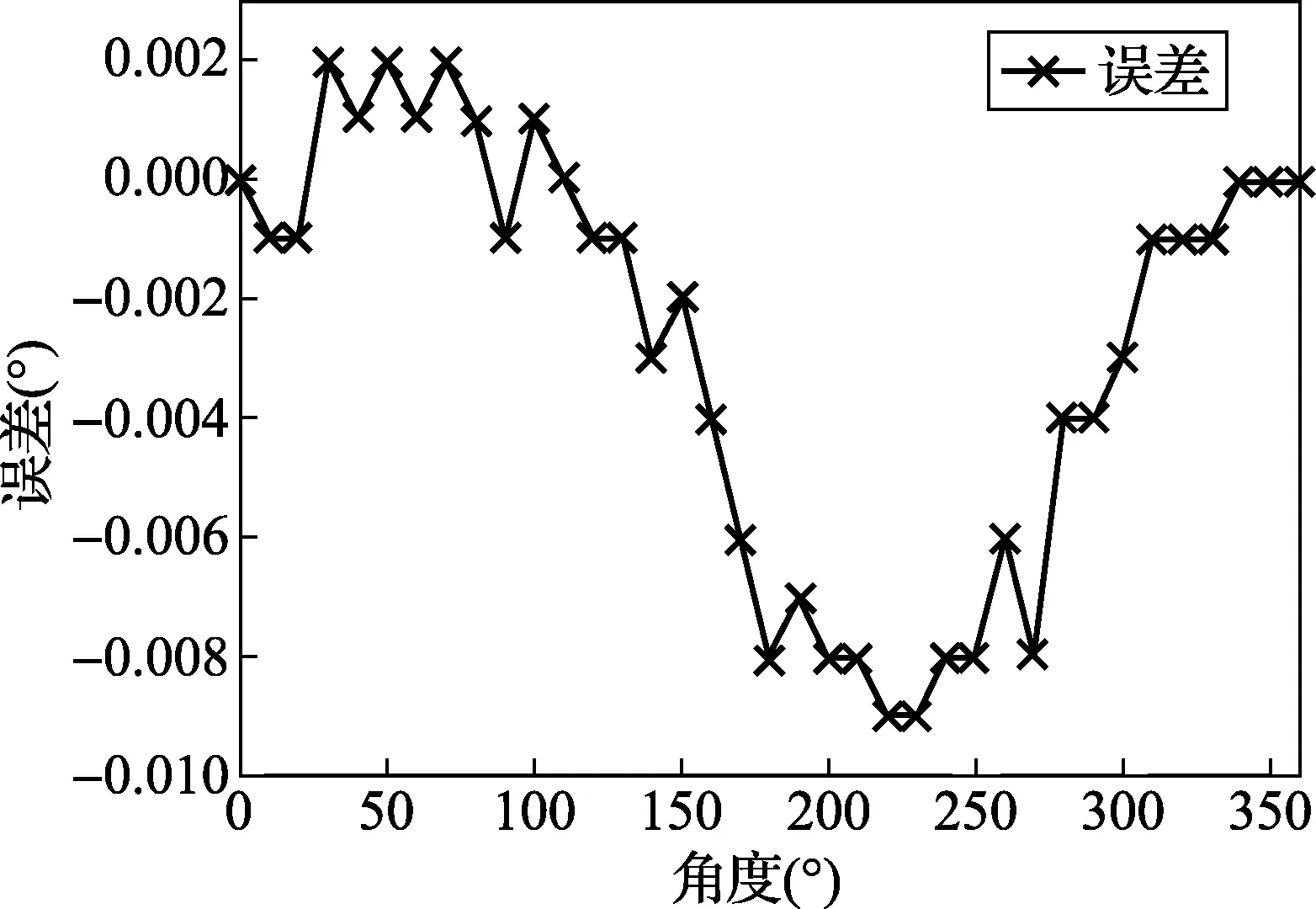
图5 角度测量误差曲线

表1 角度误差测量结果
续表
注:数学上反正切函数的值域是±90°,所以此处给出的g角也是此角度。在计算角度增量时,加上了180°或者360°的角度修正量,使得角度范围在0°~360°范围内,便于与多齿分度台的角度进行误差计算。
5 结论
文中介绍了在我所设计实现的一种非接触的旋转角度测量系统,详细的给出了该角度测量系统的构成和原理。该系统利用棋盘板图像实现对相机内参数的校准,进而实现了对被测零件图像外参数的计算,利用外参数与旋转角度之间的关系,最后得到了旋转角度。对测量的步骤进行了说明。利用立式多齿分度台作为标准器,对系统的测角误差进行了测量,试验数据表明,测量误差不超过±0.01°,取得了较理想的结果。
实验中发现,目标板覆盖图像较大范围时能获得更小的测角误差。所以要根据使用要求,合理的设计相机的工作距离,选择适当焦距的镜头。
由于条件限制,还有可以改进的地方。如选用畸变更小的镜头,选用更高分辨率的CCD,提高棋盘板的制造精度等。目前每幅图像的处理时间平均为0.2s~0.3s,还可以进一步优化测量软件提高处理速度。
[1]胡宝洁,曹密,熊伟,等.基于立体视觉的目标姿态测量技术.计算机测量与控制[J].2007,15(1):27-28
[2]吴斌,薛婷,邾继贵,等.任意位姿平面靶标实时立体视觉传感器标定.光电子·激光[J].2006,2007(11):1293-1296
[3]解邦福.基于单目视觉的刚体位姿测量系统[D].哈尔滨:哈尔滨工业大学,2009
[4]赵军.基于单目视觉的物体位姿测量方法研究[D].安徽:合肥工业大学,2005
[5]Zhang Z.Y., A Flexible New Technique for Camera Calibration[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22(11): 1330-1334
[6]甘晓川,赫明钊,叶孝佑.数字近景摄影测量中相机内参数校准.计量学报,2012,33(5):391-394
[7]张宁,张友彬,张召才,等.基于同市场参考点的落点坐标测量系统的设计与应用.计量技术,2008,(4):12-14
[8]Gary Bradski, Adrian Kaebler,学习OpenCV(中文版)(第一版)[M].北京:清华大学出版社,2009
[9]http://www.emgu.com/wiki/index.php/Main_Page,2013-09-22
[10]http://sourceforge.net/projects/emgucv/,2013-09-22
[11]http://www.emgu.com/forum/,2013-09-22
