基于RIEGL VZ-400及Ladybug3全景相机的移动激光测量系统的研制及应用
2014-02-08宋杨
宋杨
(广州市城市规划勘测设计研究院,广东广州 510060)
1 引言
移动激光道路测量系统(MMS)代表着当今世界最前沿的测绘科技,它是一种基于飞机、飞艇、火车、汽车等移动载体的快速新型激光扫描测量系统。该技术通常以车辆为移动载体,将激光设备安置在车顶、在垂直于车辆行驶方向作二维扫描,通过汽车行驶方向形成的运动维,构成三维扫描系统。
目前市场上常见的移动激光测量产品都是使用二维激光扫描传感器进行系统集成,如加拿大Optech公司的LYNX移动激光测量车、美国Applanix公司的LandMark、奥地利 Riegl公司的 VMAX-250、英国 3D Laser Mapping公司的StreetMapper360、美国MDL公司的Dynascan、日本TOPCON公司的IP-S2、诺基亚所属公司 NAVTEQ、SITECO公司的 Road Scanner以及Google使用的街景采集车。这些产品主要分为高端测量型和低端街景型两大类,高端测量型产品成本昂贵;低端街景型产品测量距离近,测量精度低,对于某些领域存在的高精度测量及高精细、高效率、有限成本的工程任务需求,上述两类产品往往很难同时满足。
针对移动激光道路测量系统产品研制与应用的现状,广州市城市规划勘测设计研究院于2012年联合首都师范大学在国内率先提出、并实现了集成了RIEGL VZ-400激光扫描仪及Ladybug3全景相机的“多传感器城市实景移动测量系统”。系统总体创新思路是把广州市规划院于2010年采购引进的、原本仅用于三维定点激光扫描的奥地利RIEGL VZ-400激光扫描仪加工、改造成可用于移动扫描模式,与Ladybug3全景相机、惯性导航装置、GPS集成,并开发出多源信息复合处理的软件,使之构成综合、完善、灵活适用于不同载体平台一体化激光测量与可量测城市实景的工程实用系统,实现应用需求的各项基本功能。
2 系统性能指标
“基于RIEGL VZ-400及Ladybug3全景相机的移动激光道路测量系统”主要由惯性导航装置IMU+POS、GPS、RIEGL VZ-400激光扫描仪、Ladybug3全景相机、里程计、工控机(笔记本)及相关后处理软件组成,为空间数据获取提供一个移动三维信息获取与处理平台,达到机动、灵活、高效率、高精度等特点,系统整体外观如图1所示。系统搭载的主要传感器的性能指标如下:

图1 基于RIEGL VZ-400及Ladybug3全景相机的移动激光道路测量系统
2.1 激光机械光学系统技术指标
·扫描视场:100°
·激光发射频率:300 kHz
·激光扫描频率:3 scan/sec~120 scan/sec
·光束发散角:0.3 mrad
·激光等级:1级安全
·工作距离:2 m~600 m
·回波采样方式:多回波探测(4回波)
·行车方向扫描点间距:20 cm(60 km/hr)
·100米外光斑大小为:3 cm
·回波灰度等级:10 bits
·测距精度:8 mm
·重复测量精度:5 mm
·测角精度:0.1 mRad
·扫描方向扫描点间距:15 cm
2.2 POS组合导航系统技术指标
GPS信号良好情况下,事后差分处理达到水平:1 cm+1 ppm,垂直:2 cm+1 ppm,航向角优于 0.1°,水平姿态角优于0.05°。输出频率大于等于 100 Hz,时间同步精度低于 1 ms,初始对准时间 15 min以内,里程计分辨率 10 cm。
2.3 系统整体测量指标及精度
系统总体定位精度:可达到国家测绘地理信息局与行业管理司于2013年3月9日起草的《地面移动测量专业标准》中对移动道路测量甲级精度要求:GPS信号良好情况下,点云的绝对定位精度优于 0.5 m。制定了移动道路测量系统检校场建立及精度测试的标准化工作机制,在广州市番禺区生物岛建立了永久性的系统检校场,并通过了由广东省测绘产品质量监督检验中心组织开展的精度测试。
2.4 其他
系统整体为刚性连接,每次安装无需重新检校,使用导轨抽拉式安装,简单方便高效,安装时间可控制在2 min~3 min内,全景相机的支架可伸缩,整体可不拆卸直接安置于普通SUV车体后备箱,如图2所示,外观采用流线型金属不锈钢壳体包装,简单大方,实现美观、紧凑、可靠的结构集成。

图2 系统可整体直接安置于普通SUV车体后备箱
3 系统功能及特色
3.1 系统功能
系统是多传感器的集成的综合系统,其主要功能包括:
(1)以正常车速沿着道路获取目标侧面100°的空间信息;
(2)提供激光点云的快速解算,完成惯导数据与激光数据的融合,得到高精度点云数据,量测的绝对精度优于国家测绘地理信息局与行业管理司提出的《地面移动测量专业标准》要求;
(3)提供360°全景影像的拼接、配准,提供带有地理参考系的可量测全景影像。
3.2 系统特色
(1)充分利用广州市城市规划院已有的RIEGL VZ-400激光扫描仪,将定点激光和车载激光互换使用,节省成本将近150万元;
(2)将水平方向可360°旋转的激光用于二维扫描,在车行时可自由设置扫描旋转角,有利于深入扫描胡同内侧,减少树木遮挡,实现国外两台激光才能达到的效果;
(3)常用车载激光相对精度为 1 cm~2 cm,RIEGL VZ-400相对精度可达毫米级,适合于对相对测量精度要求较高的项目,比如道路平整度、车辙等的测量;
(4)作业距离远,在长距离模式下可达 600 m,高速模式下可达 350 m,远远超过现有车载激光,在高速公路改扩建的项目中,在精度上可高于机载激光,在作用范围上,可替代机载激光的作用。
(5)全套设备总体重量小于 25 kg,方便搬运及装载在其他轻便载体上。
4 系统外业数据采集及内业数据处理工作流程
近年来,广州市规划院成功地利用MMS技术完成了多个数字城市管理、实景影像采集、市政部件调查、街区立面整治等方面的项目,取得了良好的社会效应,积累了丰富的实践经验,在华南地区产生了积极的示范效应。在不断的实践与探索,广州市规划院总结了一套切实可行的移动道路测量系统外业数据采集、内业数据处理的工作流程。
4.1 系统外业数据采集
MMS系统外业数据采集工作流程如图3所示,主要过程如下:
(1)开启基站,记录基站信息。
(2)设备安置、接线、安全确认。
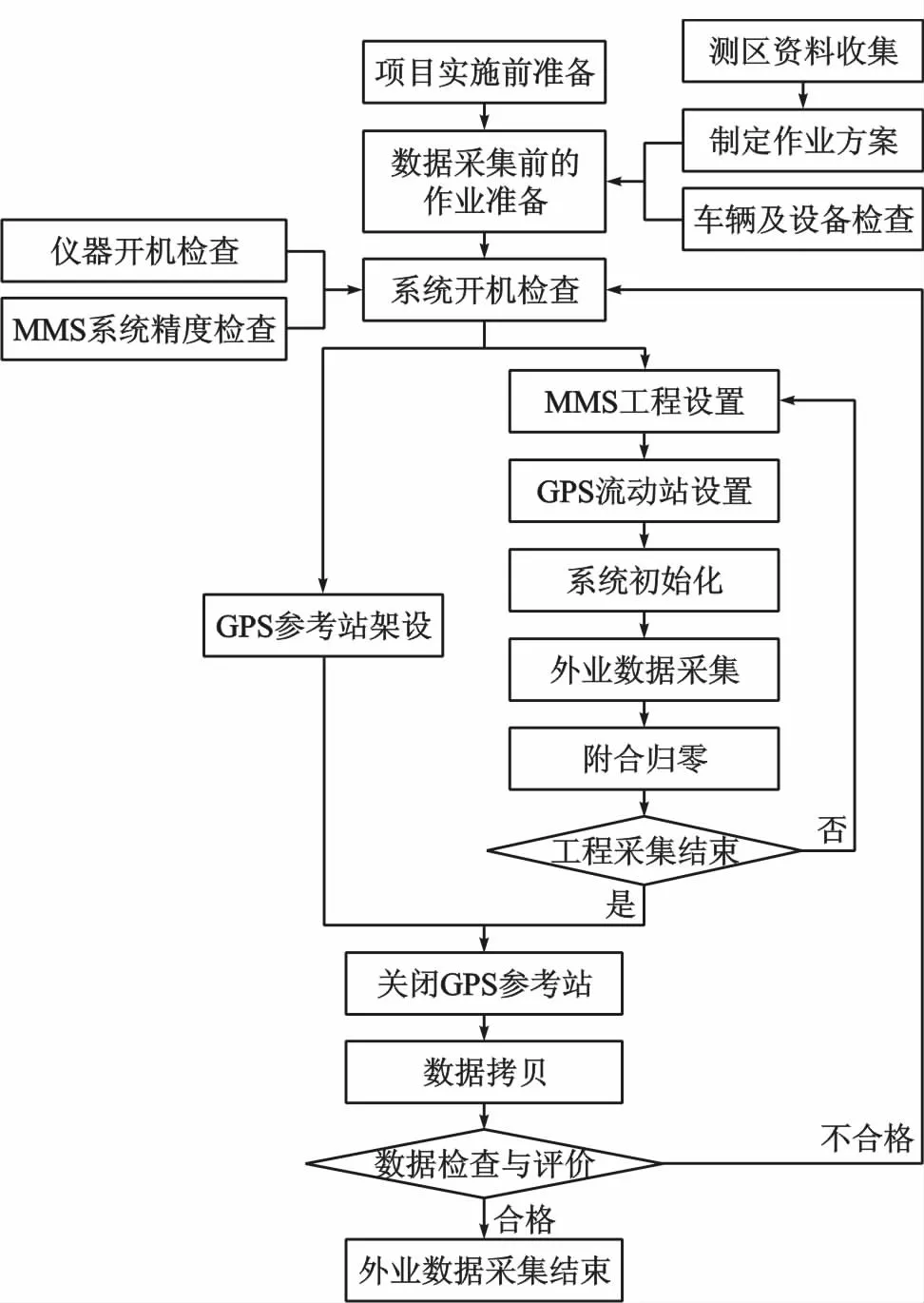
图3 MMS系统外业数据采集工作流程
(3)开启硬件系统:按照系统硬件操作流程依次开启硬件设备,并设置好硬件的状态参数。
(4)GPS接收机:打开GPS接收机和连接的计算机,检查设置参数是否正确。
(5)惯导设备:确认惯导初始参数设置的正确性,打开惯导状态监测界面。
(6)全景相机:开启全景相机,确定正常工作状态,设置当前工作的全景相机触发模式,设置全景影像存储路径。
(7)激光扫描仪:开启激光扫描仪,确定正常工作状态,设置当前作业的扫描模式,扫描角度、扫描速度等参数,设置激光扫描数据存储路径。
(8)系统软件启动:在硬件系统全部正常启动后,启动系统软件并对相关的参数进行设置,触发方式一般设置为每隔 5 m触发一次。每个工程应设定起点和终点,一般情况下,一个工程的终点与下一个工程的起点应该重合。
(9)数据采集:测量车进入测区,司机按照计划路线和作业组长要求行驶,作业人员按照规定项目内容对其进行数据采集并对影像进行保存。
在采集作业中,对出现影响数据质量、数据的完整性等问题及时给予记录,并填写《外业补测记录表》。
(10)采集作业完成后,将采集数据拷贝至外挂数据专用移动硬盘,依次关闭各硬件设备,最后关闭系统电源。
4.2 系统内业数据处理
系统内业数据主要处理包括GPS/IMU集成处理、影像地理参考、全景影像与激光点云的融合配准、属性采集、矢量编辑及标准空间数据转换,具体流程如图4所示。
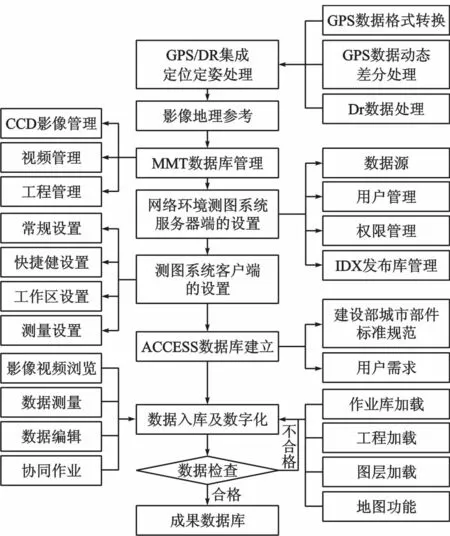
图4 MMS系统内业数据处理集工作流程
(1)GPS数据的差分后处理
将移动站的GPS/IMU融合的数据与基站采集的GPS数据进行差分后处理,消去系统和环境误差,提高移动站GPS测量数据的精度。
(2)全景影像数据后处理
影像数据后处理是指将采集的360°全景相机影像数据经过和GPS数据进行关联、处理、优化,生成入库文件。
(3)全景影像与激光点云的融合配准
传统全景影像是无空间坐标信息的,而激光点云则仅包含空间坐标信息,对该坐标的影像属性是缺失的,解决影像与点云数据的融合配准是本项目的关键性创新点之一。系统设备在采集过程中,首先实现了全景影像及激光点云两类数据在时间触发上的同步采集,以此为基础,在内业数据加工处理中,影像与点云数据可建立较高精度的配对关系,主要原理是通过由激光点云提供任意时刻、对应处全景影像的三维坐标,还原全景影像中任意点的坐标。即以激光点云数据确立的准确坐标为标准,将全景影像与其套合,在此原理上,利用辅助网格方便进行点位坐标采集,长度测量,面积测量,跨帧测量等。在全景影像中进行测量的最大优点就是无需逐个实地操作,在全景影像中就可以完成所见即所得的测量,高效安全。
全景相机与IMU偏心量的测定:全景相机与IMU偏心量可以直接用尺子量取,可以用全站仪分别测量相机投影中心和IMU中心坐标,计算出偏心量。
全景相机与IMU间相对姿态精求:用点云配准软件与全景影像叠加工具,直接调整相机姿态角,使点云与影像中特征点完全匹配重合,记录相机与IMU间相对姿态数据,如图5所示。

图5 相机影像与点云精确配准精求姿态
根据相机与IMU间相对姿态数据和组合导航结果计算相机拍摄时刻外方位元素。利用共线方程式计算点云在影像中的位置,将此RGB值赋予点云形式彩色点云数据,如图6所示。
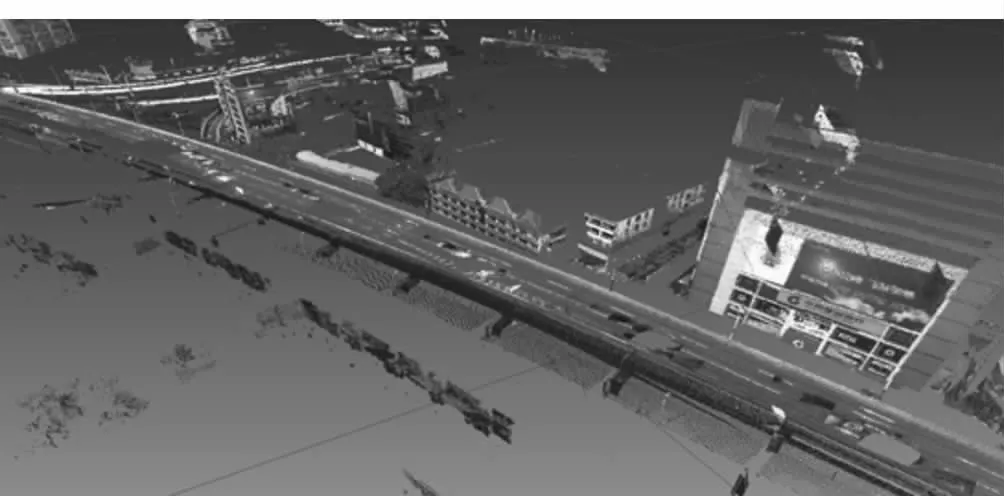
图6 用全景影像融合得到广州的彩色点云
(4)部件图层处理
属性录入结合外业采集属性数据库、影像数据、设计资料、测区收集的地形图、航空遥感影像、交通图;各类数据相互关联、相互补充,形成完整的部件图层数据。
5 应用实例
图7 全景相机影像与激光点云数据的精确配准
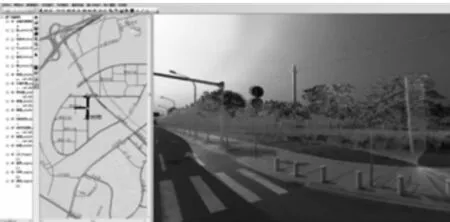
图8 二三维数据联动,基于可量测全景影像的市政要素提取,绝对精度优于0.5 m

图9 基于原始点云和全景影像实现全自动三维建模和纹理贴附

图10 具备量测功能的网络版街景发布
6 结语
“基于RIEGL VZ-400及Ladybug3全景相机的移动激光道路测量系统”在保持高精度、远距离的测量精度之外,兼顾城市实景测量车的特点、获取适合人眼视觉的全景影像,可同时适用于地面定点激光扫描、车载移动激光扫描、船载移动激光扫描等不同载体平台和应用环境。系统以及相关的处理软件自投入运行以来,已经在广州市三维实景影像采集和城市管理部件普查(二期)、数字营区建设;带状地形图测绘、道路改扩建项目;移动道路测量与航空倾斜摄影测量整合等项目中进行了实际的应用,与传统测量手段形成了很好的互补、丰富了测绘地理信息产品的形式、延伸了测绘地理信息服务的产业链,为数字广州、智慧广州进一步的发展提供强有力的支撑。
[1] 李德仁.移动测量系统技术及其应用[J].地理空间信息,2006,4(4):1 ~5.
[2]李德仁.论可量测实景影像的概念与应用——从4D产品到5D 产品[J].测绘科学,2007,32(4):5~7.
[3] 李德仁、关泽群.空间信息系统的集成与实现[M].武汉:武汉测绘科技大学出版社,2000.
[4]韩友美,王留召,钟若飞.基于激光扫描仪的线阵相机动态高精度标定[J].测绘学报,2010,39(6):631~635.
[5]王留召,韩友美,钟若飞.360°激光扫描仪锥扫描角标定[J].测绘通报,2010(9):5~8.
[6]李德仁,胡庆武.基于可量测实景影像的空间信息服务[J].武汉大学学报·信息科学版,2007,32(5):377~418.
[7]袁晓宏,刘红军,于洪伟等.导航地理数据更新与实景影像获取集成系统研究[J].测绘科学,2008(33):57~60.
[8]殷福忠,刘红军,张延波.基于移动测量技术的城市3维实景影像信息服务研究[J].测绘与空间地理信息,2008,31(6):17 ~23.
[9]姚正明,郑灿辉,曲林.浅谈移动道路测量系统外业采集[J].测绘与空间地理信息,2009,32(4):154~156.
[10] 杨沾吉.可量测实景影像在数字城管中的应用[J].测绘通报,2012(8):36~38.
[11]CH/Z 1002-2009.可量测实景影像[S].
