混凝土泵车臂架位姿方程建立及相关参数分析
2014-01-28高凤阳
高凤阳,王 珊,张 亚
(沈阳建筑大学 交通与机械工程学院,辽宁 沈阳 110168)
0 引言
机电一体化与机器人技术已成为高性能工程机械的发展方向,混凝土泵车作为现代建筑业有效的工具,其施工操作自动化已逐渐受到人们的重视。为实现混凝土泵车操作自动化,我们需解决:当混凝土泵车臂架系统的关节角给定时,确定浇筑点的位置;当浇筑点的位置给定后,经逆运算反求出臂架系统的各个关节角的相应值。前者称为混凝土泵车臂架系统关节角与末端位置的正解,后者称为反解。另外,混凝土泵车臂架系统是一具有冗余自由度的空间机构,因此其反解不是唯一确定的解,需要采用某些方法使多节臂的臂架系统达到最优控制,且其解是唯一反解。这一理论分析为进一步实现混凝土泵车臂架系统的自动化和机器人化奠定了基础,具有实际应用意义和理论研究价值。
1 混凝土泵车臂架系统位姿方程建立
混凝土泵车臂架系统基本是由底座、回转机构、大臂、中臂(以2 个为例)、小臂和软管等部分组成的串联开链机构。利用D-H 法建立混凝土泵车臂架系统的机器人化简图如图1 所示, 其中Zi轴与关节轴重合,Xi轴为沿着臂架的方向,Yi轴根据右手定则确定;角度θi为绕Zi轴,Xi轴到Xi-1轴转过的角度,规定顺时针为正,逆时针为负。

图1 混凝土泵车臂架系统的机器人化简图Fig.1 A simplified robot graphic of concrete pump truck boom syste

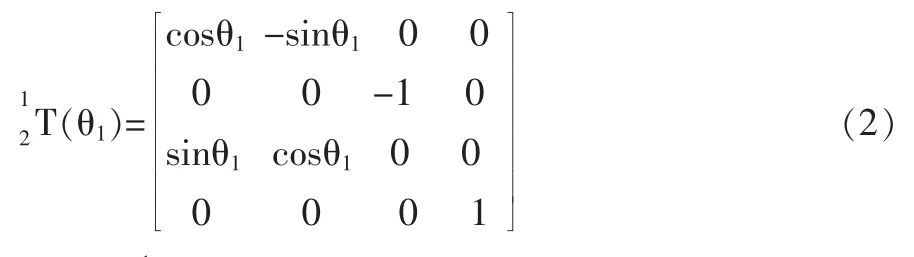


根据所建的数学模型,可以得到混凝土泵车臂架系统末端的坐标系相对于基坐标系的位姿矩阵:

式中:s0=sinθ0;c0=cosθ0;s1234=sin(θ1+θ2+θ3+θ4);
c1234=cos (θ1+θ2+θ3+θ4);px=c0[c1234l4+c123l3+c12l2+l1c1];
py=s0[c1234l4+c123l3+c12l2+l1c1];pz=s1234l4+s123l3+s12l2+l1s1。
上述式(5)的位姿矩阵为混凝土泵车臂架系统运动学正解。
2 混凝土泵车臂架系统的运动学反解
假设混凝土泵车在工作时没有障碍物,其臂架系统运动学反解是已知浇筑点位置,采用合理的解法,求解出臂架系统的各个关节角的相应值,并且保证解是唯一确定的,从而为混凝土泵车臂架系统的自动化奠定基础。
根据混凝土泵车的实际工作特点和要求,本文提出两种约束解决方案:其一、混凝土泵车在工作时,使四节臂的臂架整体近似呈弧形,这样使得泵送混凝土过程中,混凝土流动基本连续,遇到的阻力最小,从而使得混凝土泵车有较小的能耗和较高的工作效率。其二、混凝土泵车在工作时,在臂架整体近似呈弧形的同时,使后两节臂中的任意一节臂保持水平位置,这样可以减弱泵管内混凝土自由落体造成的臂架振动,避免臂架过早疲劳断裂。两种方案在某一时刻不同的臂架状态如图2、图3 所示。
对于两种约束方案而 言,关 节 角θ0的 大小是唯一确定的,根据式 (5),显然,可先求得θ0的唯一解:
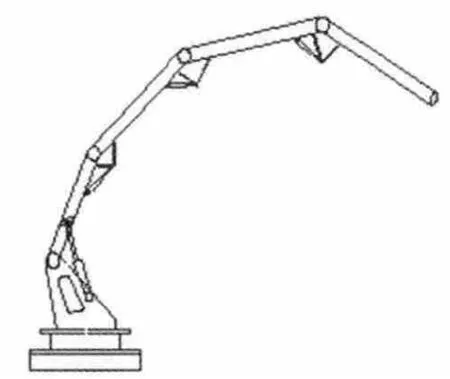
图2 臂架整体近似呈弧形Fig.2 All the booms are similar arc
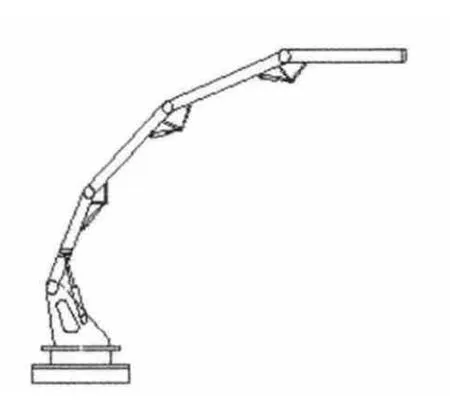
图3 前三节臂近似呈弧形,第四节臂水平Fig.3 The Former three booms are similar arc,the fourth one is level

约束方案一:确定唯一反解的策略为首先假设臂架转动的最小分辨角度为2°,规定关节角之间的关系为90°-θ1=-θ2=-θ3=-θ4=θ,此为臂架整体近似呈弧形可能的条件,θ 的大小可由下面的公式求得:

这样,先得到一组关节角的相应值θ1、θ2、θ3、θ4,为保证泵送过程中泵送顺利,防止臂架振动,初步令θ1=70°,Δθ=(70°-θ)∕3,重新取θ20=θ30=θ40=-θ-Δθ,代入式(7),求得θ10的相应值。观察上述求出的θ10的相应值是否满足θ10∈[0,90°],并且最接近70°,第一节臂架关节角θ1大一些,有利于操作。
其次,如果θ 无解,则说明此浇筑点无法到达;如果得出的θ10∉[0,90°],则令θ2n=θ3n=θ4n=θ2±2n°(n=0,1…),代入式(7),求解θ1的值,直到求得偏离70°最小的n值,如果出现θ10∈[0,90°],偏离70°超过2°,则可根据θ2n=θ3n=θ4n=θ20±2n° (n=0,1…),代入式 (7),再次求解新的θ1n,直到求得偏离70°最近的n 值,即可得到相应的θ2n、θ3n、θ4n的值。在上述的约束条件下,根据所列出的方程,可得出:

根据这样的算法,θ0、θ1、θ2、θ3、θ4已完全解出,混凝土泵车臂架系统的运动学反解结束。
约束方案二:由于θ0唯一确定,可不考虑底座θ0的旋转,混凝土泵车的四节臂在同一平面内的运动方程:

由式(10)和(11)可知,px1、pz1为已知值,θ1、θ2、θ3、θ4为未知数,即两个方程,四个未知数,所以机器人冗余自由度为2,因此关节角没有唯一确定的解。
约束条件一:从大量事实来看,臂架的断裂和应力裂缝一般都出现在第四节臂上,因为在施工时这节臂是受振幅最大、受力变化最频繁和摆动最大的位置。因此假设混凝土泵车的最后一节臂水平。
此时,臂架末端的坐标系相对于机座处的基坐标系绕X 轴转了90°,所以式(10)中有s1234=0,c1234=1,即

约束条件二:根据约束方案一,使混凝土泵车除了第四节臂以外的前三节臂仍近似呈弧形,规定:

则有:

关节角θ1、θ2、θ3的具体解法与约束方案一中的求解过程类似,这里不再赘述,而θ4根据式(12)得到。直到求得θ1偏离70°最近的值,即可得到相应的θ2、θ3、θ4的值。至此,θ0、θ1、θ2、θ3、θ4完全解出。混凝土泵车臂架系统的运动学反解结束。
3 混凝土泵车臂架系统的运动学反解算例
已知混凝土泵车臂架系统末端的位置:px=18.2m,py=10.5m,pz=16.6m,各个臂架的长度:l1=9.1m,l2=7.889m,l3=7.680m,l4=7.934m,求解各个关节角的相应值。两种约束方案解答过程中的θ0、θ1、θ2、θ3、θ4如表1和表2 所示。根据式(6)可得:θ0=arctan(py,px)=30°。

表1约束方案一的反解过程Tab.1Thenegativesolutionsprocessofconstraintsplanone
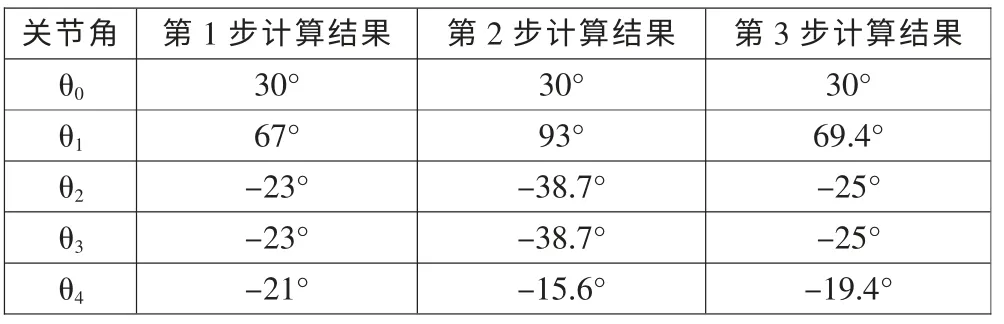
表2约束方案二的反解过程Tab.2Thenegativesolutionsprocessofconstraintsplantwo
约束方案一和约束方案二的反解均符合混凝土泵车的工作特点和要求,也满足反解的唯一确定性要求。
4 结束语
本文研究结果表明:根据D-H 法可以求解出满足要求的混凝土泵车的正解和反解,并且两种反解约束方案的算法均满足混凝土泵车实际工作特点和要求以及反解的唯一性要求,容易在控制软件中实现,提高了反解的运算速度,可以作为混凝土泵车臂架的智能化控制的理论基础。
[1] 梁聪慧,黄浩轩,陶泽安,胡敏,曾杨.冗余自由度机械臂的逆运动控制、建模与仿真[J].建设机械技术与管理,2012,9.
[2] 凌志勇,付鹏飞,刘洪庆,李广鑫.五臂混凝土泵车臂架变幅机构的仿真研究[J].机械设计与制造,2011,5.
[3] 郭立新,张郭忠,郭咏梅.泵车布料机构运动学分析及轨迹规划控制建模与仿真[J].机械,2001,1.
[4] 万佳先.混凝土泵车臂架D-H 矩阵分析和仿真[J].科技创新导报,2011,17.
[5] 谢志江,李诚,刘楠,倪卫.6 自由度装校机器人逆解的确定[D].吉林大学学报,2012,6.
