粒子碰撞噪声检测仪校准与测量不确定度评定
2013-12-10邢荣欣李洁赵昭王酣
邢荣欣,李洁,赵昭,王酣
(中国电子技术标准化研究院,北京100176)
0 引言
粒子碰撞噪声检测仪(PIND,Particle Impact Noise Detection)是微电子元器件可靠性筛选的重要设备,用于检测封装器件内的多余粒子。PIND 在军工领域的应用非常广泛,国军标GJB548B -2005 《微电子器件试验方法和程序》和GJB128-1997《半导体分立器件试验方法》中都对PIND 试验的方法和流程作了明确规定。
PIND 的基本测试原理是:在机械冲击下,元器件内部空腔中可能存在的微小粒子与器件空腔壁分离,变为自由粒子;自由粒子在规定频率和加速度的正弦振动下,与器件空腔内壁发生微小碰撞,产生粒子噪声;PIND 通过STU 传感器探测到该粒子噪声,以声光方式报警,通知操作人员器件内部存在微小粒子。PIND 的基本结构如图1 所示。

图1 充电平板检测仪结构框图
1 PIND 的主要技术指标及校准方法
根据PIND 的基本结构和工作原理,并结合相关标准规定,归纳PIND 的主要技术指标:振动加速度幅值、振动频率、振动时间、冲击加速度幅值、冲击脉冲宽度等。表1 为PIND 的主要技术指标。
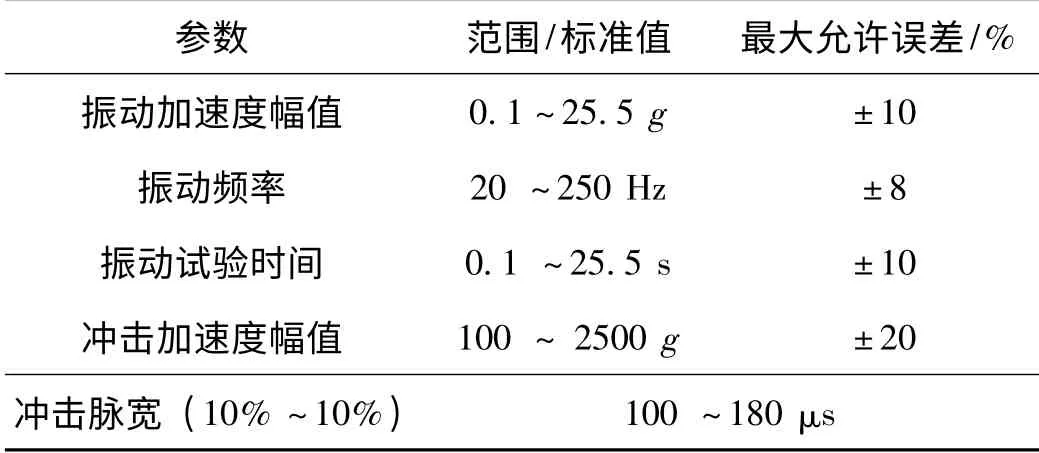
表1 PIND 主要技术指标
1.1 振动参数校准
振动参数的校准,包括振动加速度幅值、振动频率和振动时间的校准,可通过压电式振动传感器、电荷放大器、频率计和示波器组成的振动校准系统实现,如图2 (a)和2 (b)所示。其中图2 (a)为振动加速度幅值和振动试验时间校准装置,图2 (b)为振动频率校准装置。
校准方法:将校准用压电振动传感器用专用双面胶固定在被校PIND 的振动冲击台上。根据规程和客户需求设定被校PIND 的振动加速度幅值和振动频率(振动加速度一般选取5,10 ,20 g,振动频率覆盖20 ~250 Hz)。利用示波器读取电荷放大器的输出电压峰值,根据加速度计的参考灵敏度、电荷放大器的准确度计算振动加速度幅值校准值;利用频率计,进行振动频率校准;设定PIND 振动时间,利用示波器进行振动试验时间校准。本文中,振动参数校准选用的设备包括:YD-12 型压电振动传感器、DHF - 2 型电荷放大器、53131A 型数字频率计和DPO4104B 型数字示波器。
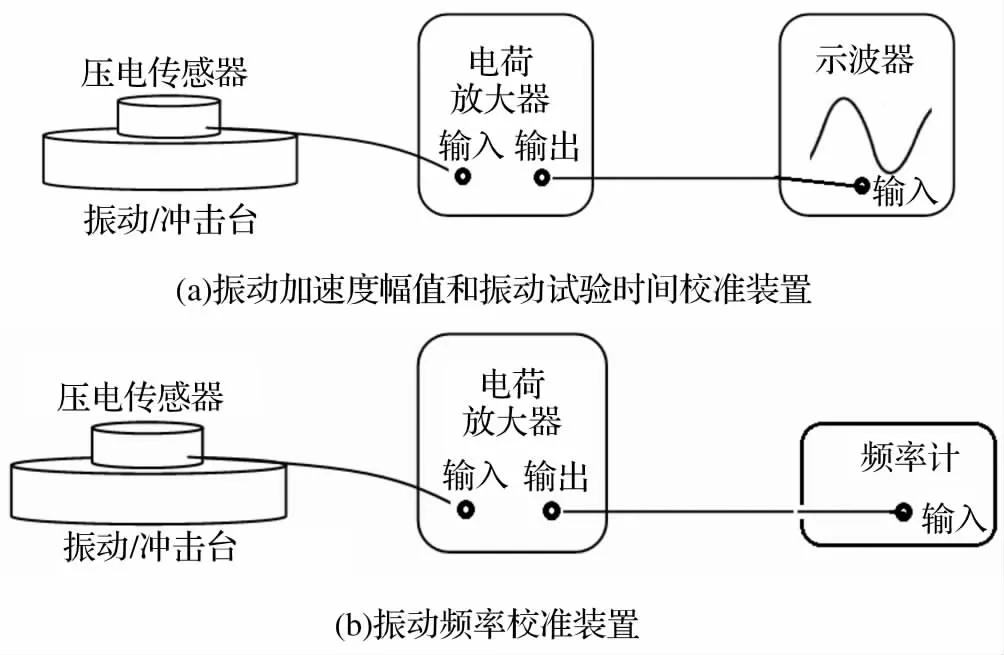
图2 PIND 振动参数校准装置
1.2 冲击参数校准
冲击参数的校准,包括冲击加速度幅值、冲击脉宽的校准,可利用压电加速度传感器、电荷放大器和示波器组成的冲击校准系统实现,其装置示意图同图2 (a)。
校准方法:将校准用加速度传感器用双面胶固定在被校PIND 的振动冲击台上。在进行冲击参数校准前,须进行PIND 的带载冲击加速度自校正;根据规程和客户需求设定被校PIND 的冲击加速度幅值(一般选取1000 g 和2000 g)。利用冲击参数校准装置对被校PIND 的冲击加速度幅值和冲击脉宽进行校准。本文中,冲击参数校准选用的设备包括:YD -5 型振动传感器、DHF-2 型电荷放大器和DPO4104B 型数字示波器。
2 校准实例与测量不确定度分析
2.1 校准实例
根据以上介绍的PIND 校准装置,对45llL 型PIND测试系统进行了校准验证,以下为试验数据和试验波形。
2.1.1 振动加速度幅值校准
根据以上方法,对PIND 振动加速度幅值进行了校准试验,校准数据如表2 所示。

表2 振动加速度幅值校准数据 g
2.1.2 振动频率校准
对于振动频率校准,校准点的选取应包含GJB548和GJB128 要求的测量点,同时应覆盖最大和最小值。校准数据如表3 所示。
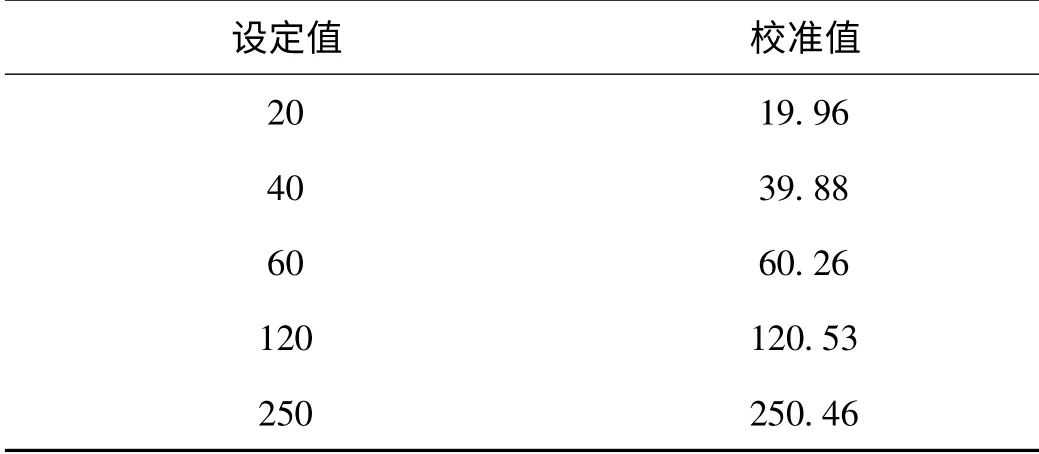
表3 振动频率校准数据 Hz
2.1.3 振动时间校准
根据GJB548B,振动试验时间规定为3 s,因此仅对3 s 定时和最短定时0.1 s、最长定时25.5 s 进行校准即可。3 s 振动时间校准波形如图3 所示。校准数据如表4 所示。
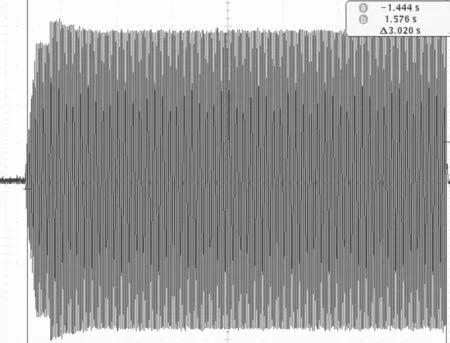
图3 振动时间校准波形(3s)
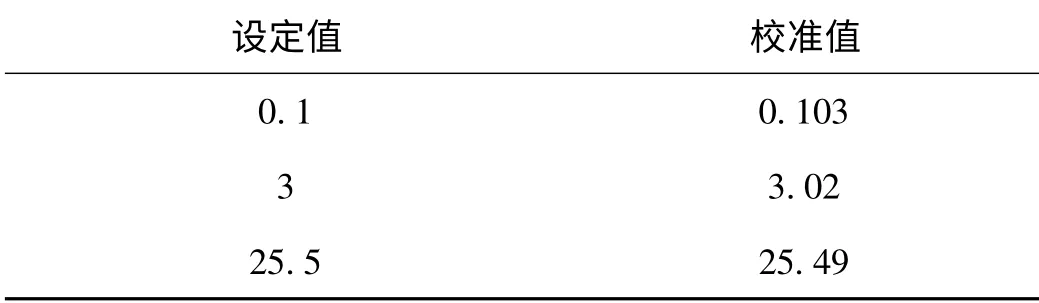
表4 振动频率校准数据 s
2.1.4 冲击加速度幅度校准
对于冲击加速度的校准,选取1000 g,2000 g 两个校准点。由于冲击台在主冲击峰后不会立刻静止,后面还会有一些小的冲击波形(如图4),因此在进行冲击校准时,应尽量选择较高的触发电平或者采取单次触发方式,以保证示波器采集的波形为冲击波形的第一峰。1000 g 校准波形如图5,冲击加速度幅值校准数据如表5 所示。

图4 冲击校准波形(1000 g)
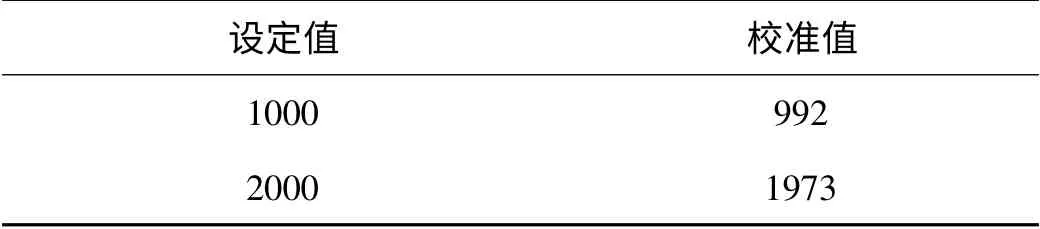
表5 冲击加速度幅值校准数据 g
2.1.5 冲击脉宽校准
冲击脉宽的校准是在冲击幅度校准采集的冲击波形上,对其脉宽参数进行校准。1000g 冲击波形的脉宽校准波形如图6 所示。脉宽校准数据如表6 所示。
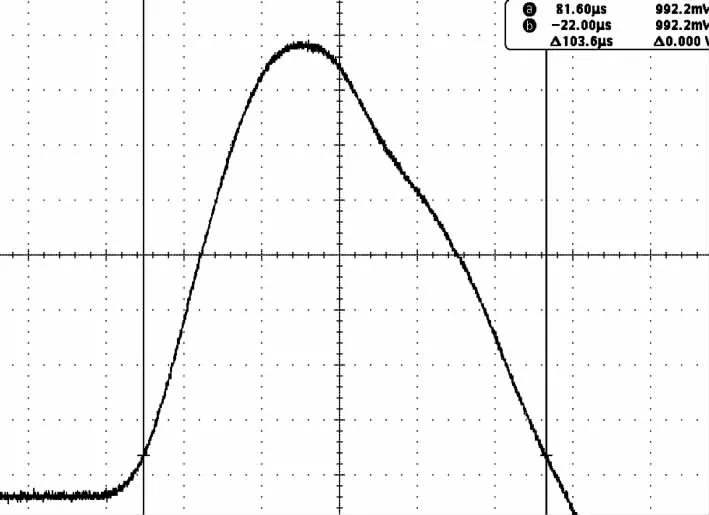
图6 冲击脉宽校准波形(1000 g)
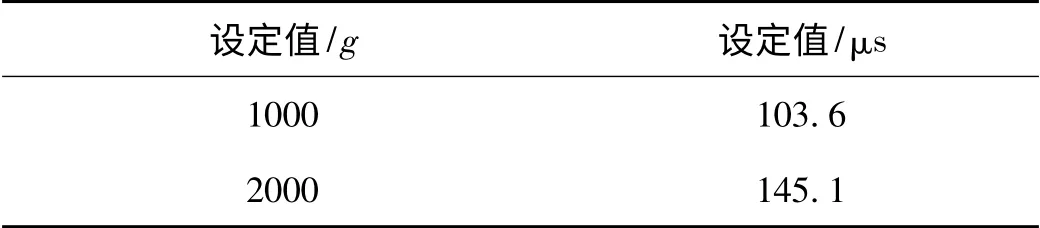
表6 冲击脉宽校准数据
2.2 测量不确定度分析
2.2.1 振动加速度幅值校准的测量不确定度
振动加速度幅度校准测量不确定度来源主要包括:振动校准装置的加速度幅值测量不准引入的测量不确定度分量、重复多次测量引入的测量不确定度分量,以及周围环境等引入的振动加速度幅值测量不确定度分量。以下以10 g 为例对测量不确定度进行分析评定。
1)重复测量引入的测量不确定度分量uA
设定PIND 振动加速度为10 g,振动频率为60 Hz,重复独立测量10 次,得到振动加速度幅值校准数据为9.96,9.92,9.92,9.96,9.98,9.96,9.94,9.90,9.94,9.92 g。
代入贝塞尔公式计算本次测量的实验标准差:
计算得到A 类不确定度:uA=0.03 g
2)由振动校准装置的加速度幅值测量不准引入的测量不确定度分量uB1
对于校准装置引入的测量不确定度分量,属于B类测量不确定度分量。根据上级计量部门给出的检定证书,校准装置的最大允许相对误差为3%,最大允许绝对误差为0.3 g。取半宽区间,为均匀分布,k =,则引入的测量不确定度分量为
3)周围环境等引入的测量不确定度分量uB2
周围环境等引入的测量不确定度分量无法准确评估,设为uB2= 0.01 g。
4)计算合成标准不确定度
设以上引入各不确定度的因素独立且不相关,则

5)扩展不确定度评定
取包含因子k=2,则
扩展不确定度U = k × uc= 0.35 g(k=2),相对扩展测量不确定度为3.5% (k=2)。
2.2.2 振动频率校准的测量不确定度
振动频率校准的测量不确定度主要来源:频率计频率测量不准引入的测量不确定度分量、重复多次测量引入的测量不确定度分量、电荷放大器DHF -2 和压电传感器YD-12 频率响应范围引入的测量不确定度分量。以下以60 Hz 校准点为例进行测量不确定度的评定。
1)测量重复性引入的测量不确定度分量uA
设定PIND 振动加速度为10 g,振动频率为60 Hz,重复独立测量10 次,得到振动频率校准数据分别为60.40,60.26,60.38,60.40,60.26,60.32,60.29,60.44,60.47,60.26 Hz。
代入贝塞尔公式计算本次测量的实验标准差:
计算得到A 类不确定度:uA=0.08 Hz
2)由频率计53131A 频率测量不准引入的测量不确定度分量uB1
根据53131A 的技术手册,53131A 的最大允许误差为± 0.01%,校准60 Hz 的最大允许绝对误差为0.006 Hz。取半宽区间,为均匀分布,k =,则引入的测量不确定度分量为

3)由压电传感器和电荷放大器频率响应范围引入的测量不确定度分量uB2
由于压电传感器的频率响应范围为1 Hz ~10 kHz,电荷放大器的频率响应范围为0.3 Hz ~100 kHz,这与被测频率相差数个量级,因此由压电传感器和电荷放大器频率范围引起的测量不确定度分量可以忽略不计。
4)计算合成标准不确定度
设以上引入各不确定度的因素独立且不相关,则

5)扩展不确定度评定
取包含因子k=2,则
扩展不确定度U = k ×uc= 0.18 Hz(k=2),相对扩展测量不确定度为0.3% (k=2)。
2.2.3 振动时间的测量不确定度
振动时间校准的测量不确定度主要来源:示波器时间间隔测量不准引入的测量不确定度分量、重复多次测量引入的测量不确定度分量。以下以3 s 校准点为例进行测量不确定度的评定。
1)测量重复性引入的测量不确定度分量uA
设定PIND 振动加速度为10 g,振动频率为60 Hz,振动时间为3 s。重复独立测量振动时间10 次,得到振动时间校准数据分别为3.02,3.00,2.99,2.99,3.01,3.00,3.01,2.99,3.00,3.01 s。
代入贝塞尔公式计算本次测量的实验标准差:
计算得到A 类不确定度:uA=0.01s
2)由示波器时间间隔测量不准引入的测量不确定度分量uB1
根据DPO4104B 的技术手册,时间间隔测量的最大允许误差为±1%,校准3 s 的最大允许绝对误差为0.03 s。取半宽区间为均匀分布,k =,则引入的测量不确定度分量为

3)计算合成标准不确定度
设以上引入各不确定度的因素独立且不相关,则

4)扩展不确定度评定
取包含因子k=2,则
扩展不确定度U = k×uc≈0.05 s(k=2),相对扩展不确定度为1.7% (k=2)。
2.2.4 冲击加速度幅值校准的测量不确定度
冲击加速度幅度校准测量不确定度来源主要包括:冲击校准装置的加速度幅值测量不准引入的测量不确定度分量、重复多次测量引入的测量不确定度分量。以下以1000g 为例对测量不确定度进行分析评定。
1)重复测量引入的测量不确定度分量uA
设定PIND 冲击加速度为1000g,重复独立测量10次,得到冲击加速度幅值校准数据分别为996,992,990,997,989,990,987,996,991,996 g。
代入贝塞尔公式计算本次测量的实验标准差:
计算得到A 类不确定度:uA=3.6 g
2)由冲击校准装置的加速度幅值测量不准引入的测量不确定度分量uB1
根据上级计量部门给出的检定证书,校准装置的最大允许相对误差为5%,绝对最大允许误差为50 g。取半宽区间,为均匀分布,,则引入的测量不确定度分量为
3)计算合成标准不确定度
设以上引入各不确定度的因素独立且不相关,则

4)扩展不确定度评定
取包含因子k=2,则
扩展不确定度U = k × uc= 60 g(k=2),相对扩展测量不确定度为6% (k=2)。
2.2.5 冲击脉宽校准的测量不确定度
冲击脉宽校准的测量不确定度主要来源:示波器时间间隔测量不准引入的测量不确定度分量、由示波器电压测量误差引起的阈值不准引入的测量不确定度分量以及多次重复测量引入的测量不确定度分量。以下以1000 g 冲击加速度脉宽为例进行测量不确定度的评定。
1)测量重复性引入的测量不确定度分量uA
设定PIND 冲击加速度为1000 g,利用示波器重复独立测量冲击脉宽10 次,得到冲击脉宽的校准数据分别 为103.6,104.2,103.6,104.9,103.6,105.2,106.0 ,105.7,104.0,107.4 μs 。
代入贝塞尔公式计算本次测量的实验标准差:
计算得到A 类不确定度:uA=1.3 μs
2)由示波器时间间隔测量不准引入的测量不确定度分量uB1
根据DPO4104B 的技术手册,时间间隔测量的最大允许误差为±1%,校准104 μs 的最大允许绝对误差为1.04 μs。取半宽区间为均匀分布,,则引入的测量不确定度分量为

3)由于示波器电压测量误差引起时间阈值不准引入的测量不确定度分量uB2
设冲击脉冲上升沿的10%峰值处的斜率绝对值为k1,下降沿的10%峰值处的斜率绝对值为k2,根据波形可以估算k1=0.3 V/μs,k2=0.15 V/μs。由于示波器电压测量最大允许误差为± 1%,标称阈值电压0.992V,故由上升沿和下降沿电压阈值不准引入的脉宽测量测量不确定度分量分别为

由于上升沿和下降沿的阈值测量相互独立,因此由示波器电压测量误差引起的阈值不准引入的测量不确定度分量为

4)计算合成标准不确定度
设以上引入各不确定度的因素独立且不相关,则
5)扩展不确定度评定
取包含因子k=2,则
扩展不确定度U = k×uc≈3μs(k=2),相对扩展不确定度为3% (k=2)。
3 结论
本文论述了粒子碰撞噪声检测仪关键参数的校准方法,并给出了校准实例和测量不确定度的评定方法。对于解决粒子碰撞噪声检测仪的校准和量值溯源问题,具有一定借鉴作用。
[1]Stewart J. Slykhous.PARTICLE IMPACT NOISE DETECTION(PIND)COMBINES VIBRATION,SHOCK,AND ACOUSTICS FOR DETERMINING RELIABILITY OF ELECTRONIC COMPONENTS [J/OL] . [2013 - 03 - 10] .http://www.spectraldynamics.com/images/docs/ShockVibPINDarticle.pdf .
[2]ZHANG Hui. Dynamics analysis of vibration process in Particle Impact Noise Detection [J]. Zhejiang Univ Sci A ,2007 ,8(3):444 -448.
[3]GJB 548B-2005 微电子器件试验方法和程序[S].
[4]JJG (电子)310006 -2006 元器件粒子碰撞噪声检测仪检定规程[S].
[5]宋爱萍. 电动振动台检定装置不确定度评定[J]. 计量与测试技术,2011,38 (10):79 -81.
