基于单片机模糊控制变量施药控制系统的研究①
2013-09-27野秀玉马立龙
野秀玉, 马立龙
(1.佳木斯市第二十中学数学教研组,黑龙江 佳木斯 154002;2.佳木斯市第八中学物理教研室,黑龙江 佳木斯 154005)
0 引言
随着农业机械自动化及智能化的发展,农作物的种植面积不断地增大,以及人们对环境污染、农药残留等问题的高度重视[1],常规施药已不能满足农业生产的需要,喷药时的药滴直径不能随作业环境的变化而调整.变量施药系统是针对病虫害的多少实施变量施肥.这样,不仅提高了药液利用率,同时,也减少了农药的浪费以及多余农药对环境的不良影响,充分体现出其明显的经济、社会和生态效益.本文依据变量原理设计了一套变量施药自动控制系统,并利用MATLAB软件的模糊控制工具箱对控制器进行了仿真.仿真结果表明,系统稳定可靠,可操作性好,能够满足农业生产的要求.
1 系统描述及其功能实现
为了便于实现自动控制,本文基于实时传感技术,采用人为输入施药量的方法,即设定一个单位面积施药量.通过流量传感器测得流量的当前值,把流量当前值的偏差及偏差变化率作为控制系统的输入量,通过隔离放大和模数转化器处理后送入AT89C52的输入端,经过模糊化、模糊推理和反模糊化等过程输出控制量U(电压)去控制执行机构调节阀,从而改变施药量,使实际施药量与设定值相等.
2 系统硬件设计
控制系统中主控单元采用8位AT89C52单片机,外围电路包括:传感器、隔离放大电路、MAX232串口接口电路、A/D,D/A转换电路、4×4键盘电路和显示电路、报警电路等,硬件结构如图1所示:

图1 变量施药控制系统硬件结构
(1)单片机的选择
AT89C52单片机是美国公司生产的功能强大的适合于许多较为复杂场合的低电压、高性能CMOS 8位单片机,片内含8K字节可重擦写的闪速只读程序存储器和256字节的随机数据存储器,与MCS-51产品指令完全兼容,器件采用ATMEL公司的高密度,非易失性存储技术生产[2]
(2)电动阀的选择
电动阀是用来控制系统的流量的执行器,通过控制电动阀开度角的大小来控制系统流量的大小,本系统选用DC0-10V标准电压信号的电动阀,此阀控制精度较高,响应速度快,阀门的开度0~100%和得到的控制信号成正比,开度为0时,对应0V或4mA;开度为100%时,对应10V或20mA.行程时间60s;最大行程25mm;电源电压24VAC[3].
(3)传感器的选择
考虑到机器实际作业环境,本系统分别选用压阻式压力传感器、涡轮流量计和霍尔转速传感器,此三类传感器测速范围宽,抗干扰能力强,温度适应范围宽,能够适应农业作业环境的要求.
3 模糊控制器的结构设计及仿真
(1)模糊控制器的结构设计
模糊控制器的作用就是模仿人脑思维方式的人工控制,对模糊现象进行识别和判决,给出精确的控制量,对被控对象进行控制.本设计根据实际情况选用二维模糊控制器[3].其工作原理图如图2所示:
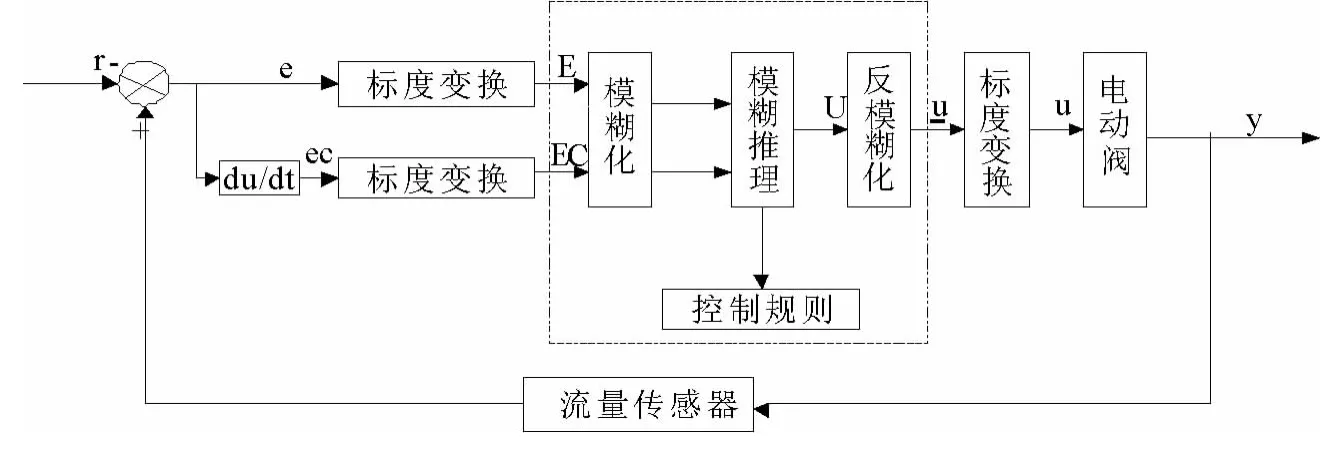
图2 变量喷药模糊控制器原理图
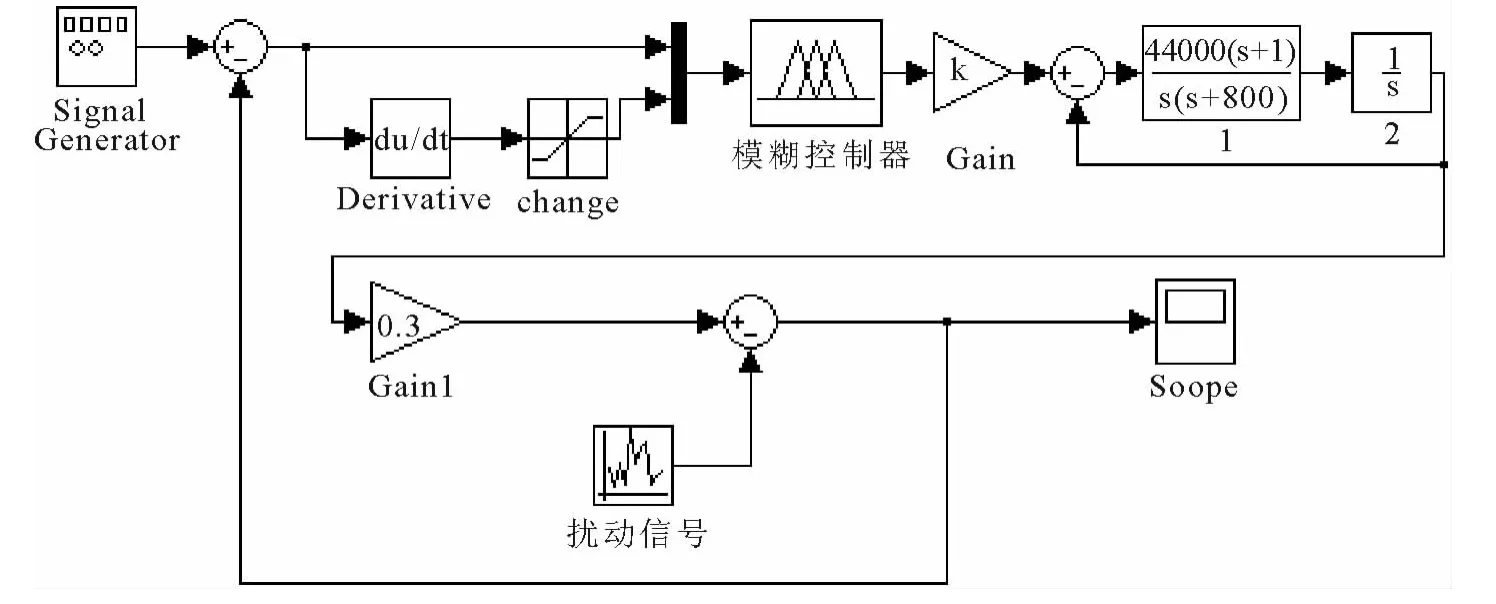
图3 模糊控制系统SIMULINK动态仿真模型
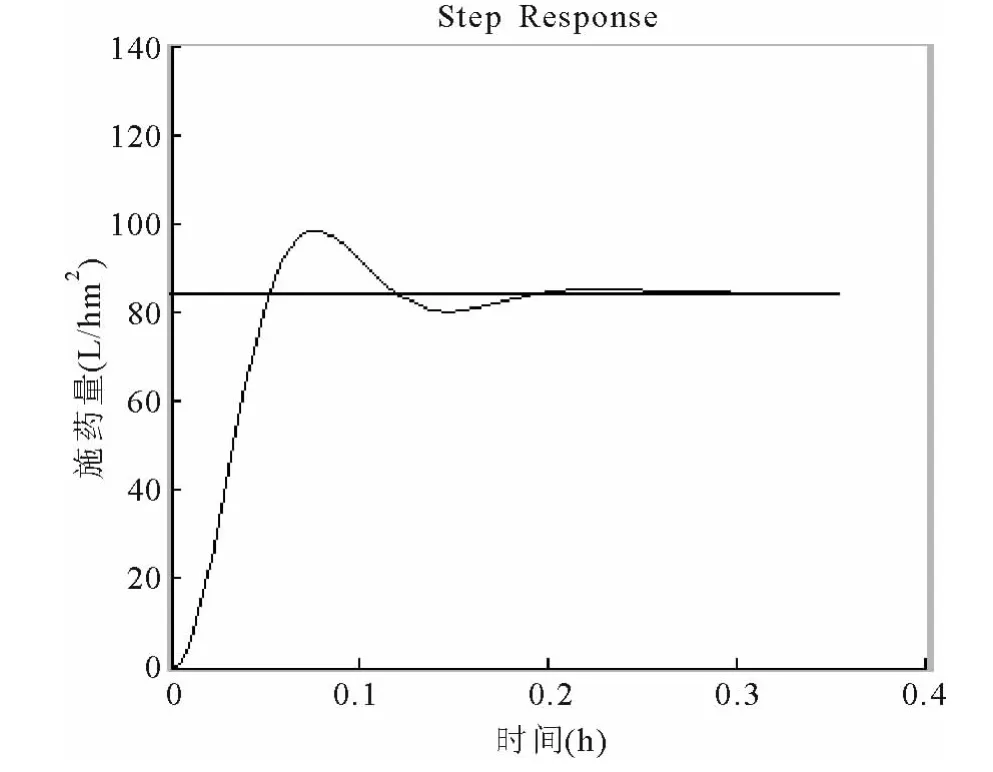
图4 通过Scope观察的仿真波形
在变量喷药模糊控制器里,将单位面积的施药量设定为,由流量传感器测得的流量记为q(t).则偏差e和偏差的变化ec为:

根据现场实际经验,确定施药量偏差量和偏差变化率的基本论域都为[-5,5]L/hm2,输出量为加到电动阀上的电压.本设计设偏差量和偏差变化量的论域为{-5,-4,-3,-2,-l,0,l,2,3,4,5}11个等级,模糊子集分为{负大,负中,负小,零,正小,正中,正大}七个等级,即{NB,NM,NS,ZO,PS,PM,PB}.本系统选用三角函数、升半梯形函数与降半梯形函数作为输入量语言值的隶属函数,用脉冲函数作为输出量语言值的隶属函数[4].
模糊控制规则的确定是根据有经验的操作者多次实践得出的若干条模糊条件语句,这些模糊语句可用模糊控制规则表表示,如表1所示.
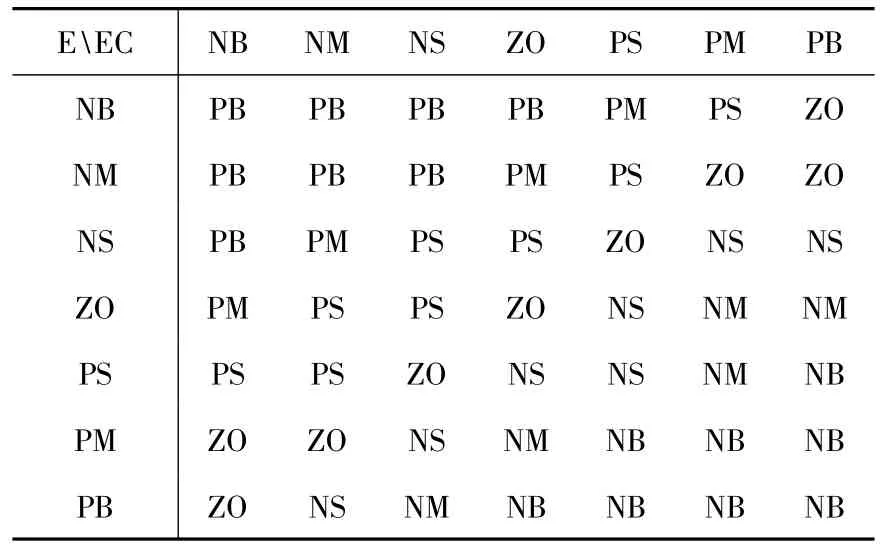
表1 模糊控制规则表
当施药量偏差E为较大时且偏差变化EC为正时,控制量应以消除偏差为主,U取正大;当偏差E为正大而误差变化EC为负时,系统具应自行消除偏差并使系统不产生超调,控制量U应取较小[5].
(2)模糊控制计算机仿真
模糊控制系统模型[5]如图3所示,该模型经过仿真后的波形如图4所示.
通过Scope观察系统的仿真输出结果可知:模糊控制超调量小,调节时间短,控制过程比较平稳,跟随性能好.
4 结论
本设计将单片机技术和模糊控制应用车载喷雾机变量喷雾控制系统中.经仿真证明该控制系统设计合理、操作简单,稳定可靠,具有潜在的市场应用前景.
[1]杨莉.基于ARM7的自动变量喷药系统设计及算法研究[D].长春:吉林大学,2008,6.
[2]Kevin P.Gillis,D.Ken Giles,David C.Slaugh ter,et al.Injection and Fluid Handling Syste for Machine-Vision Controlled Spraying[R].Sancramento,California,USA,ASAE Annual International Meeting,2001:67 -88.
[3]石辛民,郝整清.模糊控制及MATLAB仿真[M].北京:清华大学出版社,2008,3.
[4]黄金侠,等.模糊控制在中草药收获机夹持带速度控制中的应用[J].农机化研究,2010,8.
[5]王俊红,傅泽田,王秀,等.基于AT89C52单片机的变量喷雾控制器设计[J].微计算机信息,2006,22(2).
