基于地面三维激光扫描技术的隧道安全监测
2013-09-17史玉峰张迎亚
史玉峰 张 俊 张迎亚
(1南京林业大学土木工程学院,南京 210037)(2翠屏国际控股有限公司,南京 211100)
基于地面三维激光扫描技术的隧道安全监测
史玉峰1张 俊2张迎亚1
(1南京林业大学土木工程学院,南京 210037)
(2翠屏国际控股有限公司,南京 211100)
摘 要:以地铁隧道为研究对象,应用地面三维激光扫描技术采集了部分隧道三维点云数据,采用基于几何特征点与ICP算法相结合的点云数据配准方法对多视点云数据进行配准.配准数据经去噪、精简后,基于NURBS曲面理论方法建立了扫描隧道点云数据的三维模型.通过对隧道两期扫描数据模型进行叠加分析,得到隧道部分纵横断面上的整体位移量.试验结果表明,地面三维激光扫描技术可以准确、全方位获取隧道空间数据,对隧道安全监测技术与方法起到补充和提高.
关键词:隧道安全监测;地面三维激光扫描;点云数据配准;点云数据建模
隧道安全监测是隧道施工与运营时期的主要技术工作.传统隧道安全监测主要以全站仪等接触式观测技术为主,对监测点采用连续测量方法观测其位移变化情况,具有工作量大、周期长、易受外界条件影响的特点,且得到仅仅是监测点的变化情况,很难得到研究对象的整体变化情况.近些年,地面三维激光扫描技术在许多领域都得到了很好的应用,它能够快速、精确、以非接触方式高密度地获取研究对象表面的三维点云数据,应用相应的软件能够完整、高精度地重建被测实体的三维模型.
国内外许多学者与研究人员对三维激光扫描技术及其应用进行了的研究,这些研究主要集中在三维激光扫描点云数据的预处理[1-3]、点云数据的建模[4-7]以及三维激光扫描技术在建筑物整体变形[5]、滑坡[6-7]、考古[8]、桥梁变形监测等[9-11]有关领域中的应用.
1 点云数据处理基础
1.1 点云配准
多视点云配准是点云数据处理的关键技术之一,多视点云配准是把各个局部坐标系通过坐标变换统一到一个坐标系中,从而把多个测站不同角度扫描的数据合成完整的三维物体.常用的点云配准方法有基于几何特征的拼接方法和基于点几何信息的ICP算法.
基于几何特征的拼接方法是工程测量常用方法.该方法先在扫描场景周围布置一定数量的标靶点,确保相邻站点数据中同名标靶点数量达到三个以上,应用相邻测站同名标靶点对相邻测站的点云数据进行相应的空间变换和空间匹配.若设点云数据旋转和平移变换矩阵分别为R和T,则配准的目标函数为[2-3]

式中,{pi},{qj}为需要配准的相邻点云数据.
ICP算法需先假设一个初始的位置估计,然后从其中一个点云数据集中选取一定数量的扫描点,并在另一个点云数据集中寻找出这些点的邻近点作为其对应点.基于这些对应点对之间的距离平方和最小化准则,不断迭代,寻求变换矩阵,直到满足收敛条件.具体算法如下[2].
假设有2个点云集合M,N,它们的重叠部分是δ,设δ上任一点在M,N上的位置分别为mi,nj,k≤kmax表示迭代次数,Tk表示2个点云集合间的第k次变换矩阵,迭代与求算过程如下:
①初始化迭代,设置初始变换矩阵T0,欧氏距离均方差阈值τ以及最大迭代次数kmax;



⑤ 如果F(Tk-1)-F(Tk)<τ或者k>kmax,结束迭代,否则,重复步骤②~④.
基于几何特征的配准方法与ICP算法各有特点.基于几何特征的配准方法操作简单、方便理解,不需要配准变换参数的初始值;但其在特征的提取及组织上需要花费大量的时间,特别是当研究对象表面复杂,提取工作困难时,完成拼接工作就具有很大难度.ICP算法精度较高,扫描过程中勿需反射体(标靶);但其迭代过程比较耗时,尤其是初值选择不当的话收敛速度会很慢,甚至出现发散的现象.
1.2 点云去噪
由于外界环境因素的影响,地基三维激光扫描仪获取物体表面的采样点数据时,不可避免地会存在噪声点.采样数据可用如下模型表示[1]:

式中,gq(xi,yi,zi)表示被测目标的理想值;gs(xi,yi,zi)表示由于被测目标本身存在表面粗糙度、波纹以及其他一些缺陷而产生的与其理想值的偏差;ea(xi,yi,zi)表示由测量系统本身产生的具有一定规律性的误差;eb(xi,yi,zi)表示由于测量系统电噪声、热噪声等因素引起的随机测量误差.点云去噪的目的是最大限度的消除后三项的影响,保留被测目标的理想点云数值.
1.3 点云精简
点云精简,又称点云特征提取,是以较少数量的特征点来逼近原始点云模型的过程.密集的点云数据一方面会导致计算机运行效率的低下,消耗大量的时间,另一方面还会影响重构曲面的光顺性.常用的点云精简方法有包围盒法、随机采样法、曲率采样法、三维网格法4种.
本文采用比例数据精简法对点云数据进行精简.其原理是在随机采样法的基础上,给需要精简的对象限定边界,利用随机函数去除点云中的随机点,直到达到预设的精简率.这样可降低原始方法的随机性,减少点云细节遗失,且可减小后续建模中生成的曲面或网格与原始数据的偏差,提高精简精度以及实际应用中的可控性.点云数据比例数据精简方法的步骤如下[9]:
①根据要求设定阈值K.
②搜索与某一点相关的所有三角平面片,总和为S,并选择其中任意一平面的法向量P为基准,用剩余平面的法向量Qi与P求差,得向量Wi.
③将所得的S-1个Wi的三维分量值取正,得出它的模并取均值

根据预设的阈值,当R≤K,删除该点;否则保留.
④重复步骤②和③,直到处理完所有数据.
2 点云数据的三维建模
点云数据的曲面重构是点云数据三维模型构建中最关键、最复杂的一个环节,它是利用实体点云数据的几何拓扑信息,通过拟合一系列的离散点,构建一个逼近实体原始形状的近似模型.本文采用NURBS(non-uniform rational B-spline)方法对点云数据进行曲面重构,该算法具有稳定性好、运算速度较快,既能够表示规则曲面,也能表示自由曲线、曲面的特点.NURBS曲面重构方法如下[8,11]:
①构建NURBS曲线;K次的NURBS曲线用一个分段有理多项式矢函数来表示,其形式如下:
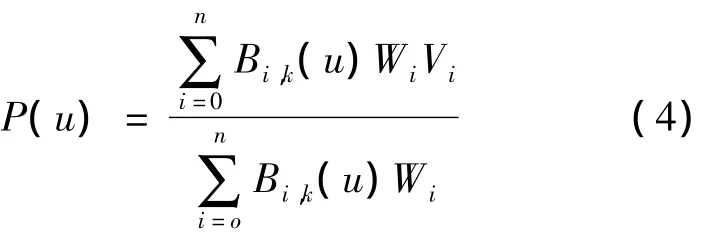
式中,Wi为权因子;Vi为控制顶点;Bi,k(u)为 K 次规范B样条基函数.
②构建NURBS曲面;K×L次NURBS曲面的有理多项式矢函数可以表示为
式中,Vi,j为控制顶点呈拓扑矩阵阵列,形成一个控制网络;Wi,j为权因子,规定四角顶点处用正权因子;Bi,k(u)和 Bj,l(w)分别为 u 向 k 次和沿 w 向 1次B样条基函数.式(6)和(7)分别为U向和W向的节点矢量.
基于NURBS方法的曲面重构,可以通过调整控制顶点和权因子,来控制和修改曲线或曲面形状,能够保证建立的模型与实体完全吻合,直观地再现扫描体的真实原貌.
3 隧道点云数据采集、处理及形变分析
3.1 数据采集设备与试验对象
本次试验采用FARO公司的Focus 3D地基三维激光三维扫描仪,试验对象为南京地铁10号线绿博园站——松花江站区间的部分已完成盾构隧道,试验的主要目的是监测隧道内壁收敛和位移变化.选择试验对象研究区域,采用自由设站扫描方式,对研究区域分三站进行扫描,扫描长度约为70 m,图1为部分隧道内壁的点云.

图1 隧道内壁扫描点云
3.2 隧道点云数据处理
隧道点云数据处理包括预处理与三维建模,预处理包括点云配准、去噪和特征提取.
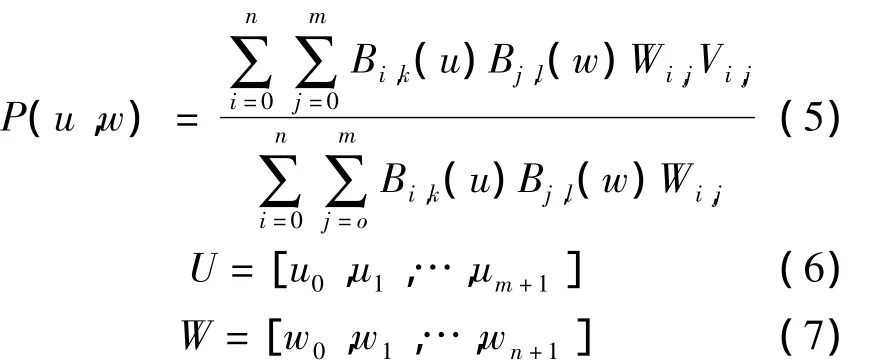
根据隧道工程狭长的结构特征,本次试验采用基于标靶的配准和ICP算法相结合方法进行点云配准.先依据共同标靶点按最小二乘原理将各站点数据进行两两拼接,把拼接结果作为新的初始位置;接着再利用ICP算法进行精配准,图2为拼接后点云.点云去噪和特征提取采用第1节中方法完成.
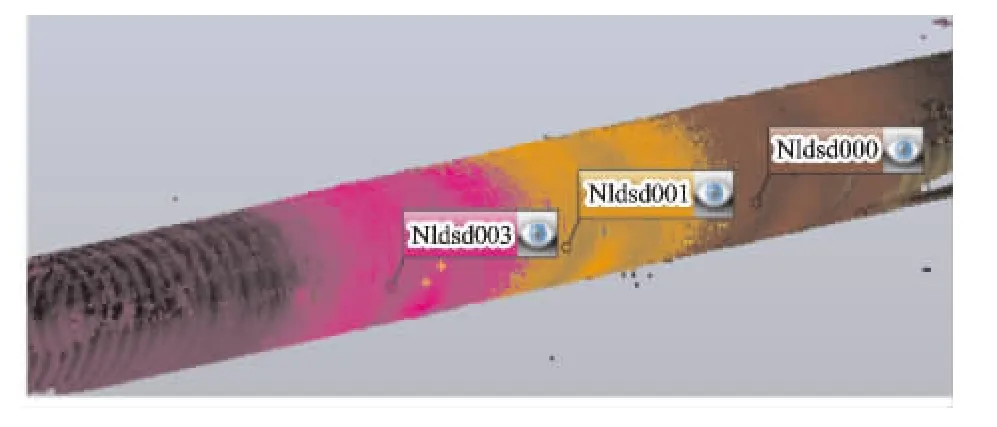
图2 配准后隧道点云
预处理后的隧道点云数据采用第2节中介绍的NURBS法进行三维建模;先用构建多边网的方式将离散的点云相互联系起来,形成一个由无数小多边形组成的网格曲面(图3为隧道局部点云多边形网格),再将这些离散多边形重构为NURBS曲面.隧道点云重构模型如图4所示.
图3 隧道局部点云多边形网格
图4 隧道点云重构模型
3.3 隧道变形分析
基于三维激光扫描技术对隧道进行安全监测,基本方法是通过采集隧道内部点云数据,建立隧道三维模型;通过对不同时间扫描数据模型的叠加分析,获取隧道中感兴趣位置上的形变量,以反映隧道局部或某一区段内的收敛变形情况,进而判断隧道的安全与稳定情况.
依据隧道安全监测要求和工程实际情况,本次试验主要监测隧道拱顶位移、拱底隆起和内壁收敛等情况.图5为基于点云数据的隧道横断面分析图,图中红色线条表示是第一期隧道模型的形态,它是模型对比分析的基准;绿色线条是第二期隧道模型的形态.图中上方通过颜色的变化来表示形变量的大小,颜色越深则形变量越大,非常直观明了;左下方为重叠后的对比图;右下方表示的是以第一期为基准,第二期相对于第一期的波动情况.由图可以看出,绿线整体位置处于红线的下方,可以得出隧道整体呈下降趋势;但整体位移量都在限差要求内,暂无安全问题.
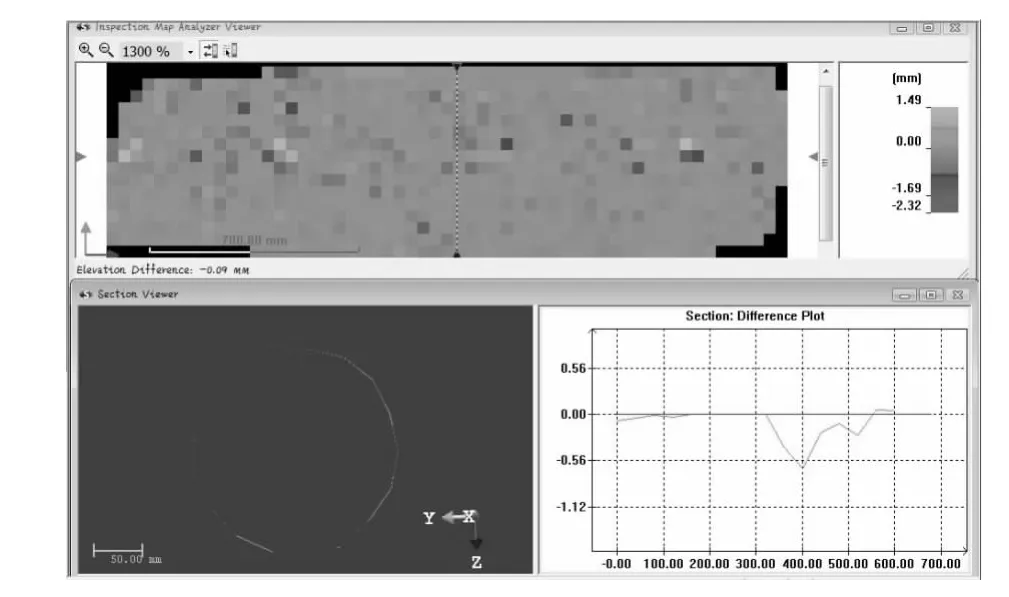
图5 基于重构模型的断面分析
4 结语
采用三维激光扫描技术对隧道安全进行监测,对采集的点云数据进行配准、去噪和精简后,应用NURBS法进行三维建模,比较同一断面在两期重构模型上的位置差异,可以分析隧道的安全.试验结果表明,应用三维激光扫描技术对隧道进行安全监测是可行的,该方法可以准确、全方位获取隧道空间数据,对隧道安全监测技术与方法起到补充与提高作用.
[1]党晓斌.三维激光扫描点云数据处理及应用技术[D].西安:长安大学地测学院,2011.
[2]张凯.三维激光扫描数据的空间配准研究[D].南京:南京师范大学地理科学学院,2008.
[3]滕志远,张爱武.单位四元素法在激光点云坐标转换中的应用[J].测绘通报,2010(11):7-10.
Teng Zhiyuan,Zhang Aiwu.Application of unit four elements method to laser point cloud coordinate transformation[J].Bulletin of Surveying And Mapping,2010(11):7-10.(in Chinese)
[4]托雷.基于三维激光扫描数据的地铁隧道变形监测[D].北京:中国地质大学,2012
[5]罗德安,朱光,陆立,等.基于三维激光影像扫描技术的整体变形监测[J].测绘通报,2005(7):40-42.
Luo Dean,Zhu Guang,Lu Li,et al.Whole object deformation monitoring based on 3D laser scanning technology[J].Bulletin of Surveying And Mapping,2005(7):40-42.(in Chinese)
[6]Strouth A,Burk R L,Eberhardt E.The afternoon creek rockslide near newhalem,washington[J].Landslides,2006(3):175-179.
[7]Wong Andrew,Kwong K L Alan,Ng Jacky.Monitoring slope failure at kadoorie agricultural research centre with a 3D laser scanner[C]//Strategic Integration of Surveying Services.Hong Kong,China,2007:13-17.
[8]Allen P K,Stamos I,Troccoli A,et al.3D modeling of historic sites using range and image data[C]//Proceedings of the 2003 IEEE International Conference on Robotics & Automation.Taipei,China,2003:145-150.
[9]Rok Vezoĉnik,Tomaž Ambrožiĉ,Oskar Sterle.Use of terrestrial laser scanning technology for long term high precision deformation monitoring[J].Sensors,2009,9:9873-9895.
[10]Olsen M,Kuester F,Chang B.Terrestrial laser scanning-based structural damage assessment[J].Journal of Computing in Civil Engineering,2010,24(3):264-272.
[11]Riveiro B,Morer P,Arias P.Terrestrial laser scanning and limit analysis of masonry arch bridges[J].Construction and Building Materials,2011,25(4):1726-1735.
Tunnel safety monitoring based on terrestrial laser scanning technology
Shi Yufeng1Zhang Jun2Zhang Yingya1
(1College of Civil Engineering,Nanjing Forestry University,Nanjing 210037,China)
(2Tsui Ping International Holdings CO.,LTD,Nanjing 211100,China)
Abstract:The subway tunnel is selected as the research object,and a part of the tunnel is scanned by 3D terrestrial laser scanning technology to obtain the 3D point cloud data of the researched tunnel.A novel point cloud data registration method based on geometrical feature points and the ICP(iterative closest point)algorithm is used to register scans from multiple positions.After denoising and simplification,the registered point cloud data is modeled based on the method of NURBS(nonuniform rational B-spline)surface.By overlaying two-periodic point cloud data,the whole displacement of the tunnel's vertical and horizontal sections can be obtained.The experimental results show that 3D terrestrial laser scanning technology can obtain accurate and omni-directional subway tunnel spatial data,so it is a supplement to the current tunnel safety monitoring methods.
Key words:tunnel safety monitoring;3D terrestrial laser scanning;point cloud data registration;point cloud data modeling
中图分类号:P208
A
1001-0505(2013)S2-0246-04
doi:10.3969/j.issn.1001-0505.2013.S2.006
收稿日期:2013-08-20.
史玉峰(1965—),男,博士,教授,shiyufengnjfu@gmail.com.
基金项目:江苏高校优势学科建设工程资助项目(PAPD)、住房和城乡建设部科学技术资助项目(2010-K9-19).
引文格式:史玉峰,张俊,张迎亚.基于地面三维激光扫描技术的隧道安全监测[J].东南大学学报:自然科学版,2013,43(S2):246-249.[doi:10.3969/j.issn.1001-0505.2013.S2.006]
