用于玻璃幕墙现场检测的爬壁机器人的研制
2013-09-04张传淼
张传淼,刘 荣,王 珂
(北京航空航天大学 机械工程及自动化学院,北京 100191)
0 引言
近年来,随着我国国民经济的迅速发展,玻璃幕墙尤其是全隐框玻璃幕墙,作为一种美观新颖的建筑墙体装饰方法被越来越多地应用于高层建筑上。由于该类建筑多分布于人群密集的商业区和城市中心地带,因此,对玻璃幕墙的安全性能要求甚高[1]。玻璃幕墙随着使用年限的增加,必然出现结构密封胶老化、支撑结构的可靠性降低等问题,甚至导致玻璃幕墙松动或坠落。目前,玻璃幕墙大多还是依靠人工进行检测,然而人工检测具有一定的危险性,且效率普遍较低。而随着移动机器人[2-4]技术的进步,机器人已经被越来越多地应用到了实际作业中,其中爬壁机器人在壁面特种作业中有着广泛的应用,将其应用于玻璃幕墙的现场检测,既可降低人工操作的危险性,又可提高玻璃幕墙检测的效率和智能化水平。
本文结合国内外爬壁机器人和玻璃幕墙检测技术的研究成果,设计了一种用于玻璃幕墙现场安全检测的双腔体负压爬壁机器人,该机器人能够在玻璃壁面上自由移动并通过检测装置对玻璃进行安全检测。先后开发了两代机器人样机,并通过样机实验和性能分析验证了将爬壁机器人作为玻璃幕墙检测平台的可行性与合理性。
1 总体方案介绍
爬壁机器人必须具备吸附和移动两个基本功能。吸附方式可分为负压吸附、磁吸附和特种吸附等。移动方式有轮式、履带式、框架式和步足式等。对于本文研究的爬壁机器人,由于其作业对象为光滑的幕墙玻璃,并且要求机器人的体积和质量不能过大,同时要求机器人移动灵活、操作简单,还有对幕墙玻璃间凹槽的要求,故选择采用双腔体负压吸附方式以及轮式移动方式。
目前对玻璃幕墙的现场检测主要是检测其支撑结构松动及结构胶损伤与老化的程度,支撑结构体系的松动损伤可以通过测量玻璃的固有频率识别出来,幕墙玻璃的固有频率随着边界支撑的松动而降低;隐框玻璃幕墙结构胶的老化程度可以通过测量玻璃的位移模态振型进行识别,随着结构胶的粘结作用力下降,玻璃边界处振动幅值明显增大,同时,幕墙玻璃的固有频率减小。综上所述,通过现场测量玻璃的固有频率和振幅,并与理论计算值区间进行对比,就能够定性或定量地评估幕墙玻璃的松动脱落危险程度,进而评价玻璃幕墙的安全可靠性能[5]。
综上所述,玻璃幕墙检测方式的总体方案如图1所示。具体工作过程为:将机器人从全隐框幕墙高楼某一层的窗户伸出,并从该层的某块玻璃开始,自上向下地进行检测;检测过程中,机器人吸附在已经验证为安全的一块幕墙玻璃上,通过伸出的检测杆对其周围的若干块玻璃进行检测;当机器人检测到某块玻璃的安全系数过小时,应采取相应的规避措施;检测作业完成后,立即更换未达到安全要求的玻璃。
2 机械结构设计
玻璃幕墙检测机器人的机械系统主要由移动机构、吸附模块和检测装置3部分组成,第二代幕墙检测机器人如图2所示。

图1 玻璃幕墙检测的总体方案

图2 玻璃幕墙检测机器人
如图3所示,玻璃幕墙检测机器人采用轮式移动机构,分别由两个直流电机驱动两个主动轮,通过同步带将运动传递给被动轮系。
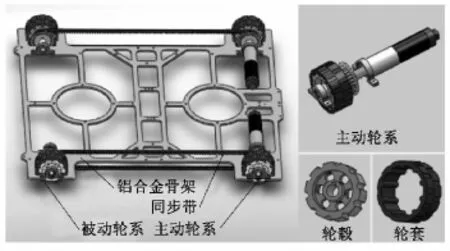
图3 轮式移动机构
本文选用外转子无刷电机驱动离心叶轮作为负压发生装置,叶轮旋转时在密封结构里产生一个负压区域,具体结构如图4所示。
机器人检测装置如图5所示,包括压紧装置和激励装置两部分,压紧装置用来完成将传感器在玻璃壁面上压紧或抬起,激励装置用来完成敲击玻璃的动作以激发被测玻璃产生振动。

图4 吸附模块

图5 检测装置
3 控制系统设计
现控制系统主要是通过上位机软件用无线遥控的方式完成对玻璃幕墙检测机器人的移动控制和检测作业控制。
幕墙检测机器人控制系统的结构框图如图6所示,机器人的控制流程可描述为如下过程:操作人员通过PC机的人机交互界面输入控制指令,指令按照通讯协议打包,通过无线通讯传送至机器人的主控电路板,由主控模块按照通讯协议对控制指令进行解析,最终形成对风机、检测传感器以及行走电机的控制。当激励装置敲击玻璃产生振动时,数据采集卡捕获由传感器得到的幕墙振动频率数据,通过数据处理软件进行分析,便可得到所检测玻璃幕墙的安全状况。
图7为幕墙检测机器人的控制软件界面,它分为常规速度方向控制、串口设置、位置伺服控制、风机控制以及检测控制几个功能区域。
4 样机实验
玻璃幕墙检测机器人实验内容主要包括样机的运动功能实验以及样机的幕墙玻璃检测实验。
图8为机器人运动性能实验。机器人原地转弯运动实验中,机器人顺时针原地转弯了90°,转弯的过程中会产生向下的微小滑移,实际测得机器人原地转弯的半径约为320mm。越沟槽实验中,所选取的凹槽为20mm。实验证实,机器人在越沟槽的过程中,移动平稳,吸附正常。
玻璃幕墙检测实验的流程如下:首先控制幕墙机器人向待检测的玻璃移动,当到达检测位置后,机器人停止移动,控制机器人的压紧装置将传感器压在幕墙玻璃上,并操作激励装置的橡胶敲击头开始敲击玻璃,传感器采集的数据经采集卡无线发送回计算机,玻璃幕墙动态分析软件便可得到该块玻璃的特性参数。检测完毕,机器人抬起传感器,移向下一块待检测玻璃。
图9为玻璃幕墙检测实验的序列图,经实验测得该块幕墙玻璃的固有频率为43.5Hz。

图6 控制系统结构框图
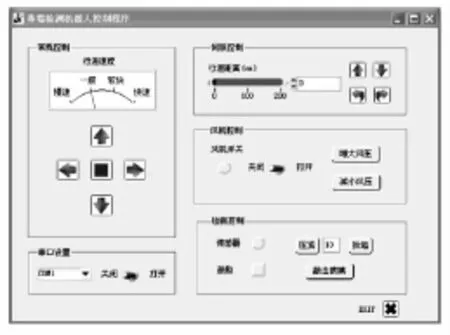
图7 控制软件界面

图8 样机运动性能实验

图9 玻璃幕墙检测实验序列图
5 结论
本文根据玻璃幕墙检测技术的要求,提出了一种双腔体负压爬壁机器人结构,并对该方案进行了总体设计,确定了隐框玻璃幕墙的检测方式。对样机进行了多项实验。机器人在玻璃幕墙上的直行、转弯和越凹槽等实验表明:样机吸附稳定、移动灵活,可轻松越过典型隐框幕墙凹槽,具有较强的壁面适应性。幕墙玻璃检测实验表明:玻璃幕墙检测机器人可以高效准确地完成幕墙玻璃检测任务。
[1] 郑敬杰,左勇志,施刚,等.玻璃幕墙的检测技术与评估方法[J].钢结构,2008(S1):586-591.
[2] 付宜利,李志海.爬壁机器人的研究进展[J].机械设计,2008(4):1-5.
[3] Wu Shanqiang,Li Mantian,Xiao Shu,et al.A wireless distributed wall climbing robotic system for reconnaissance purpose[G]∥Proceedings of the 2006 IEEE International Conference on Mechatronics and Automation.[s.l.]:IEEE,2006:1308-1312.
[4] Wang Y,Liu S,Xu D.Development & application of wall-climbing robots[G]∥ Proceedings of the 1999 International Conference on Robotics & Automation.[s.l.]:[s.n],1999:1207-1212.
[5] 刘小根,包亦望,宋一乐,等.振动测试技术在玻璃幕墙安全评估中应用研究[G]∥2009年全国玻璃科学技术年会论文集.北京:中国硅酸盐学会,2009:135-142.